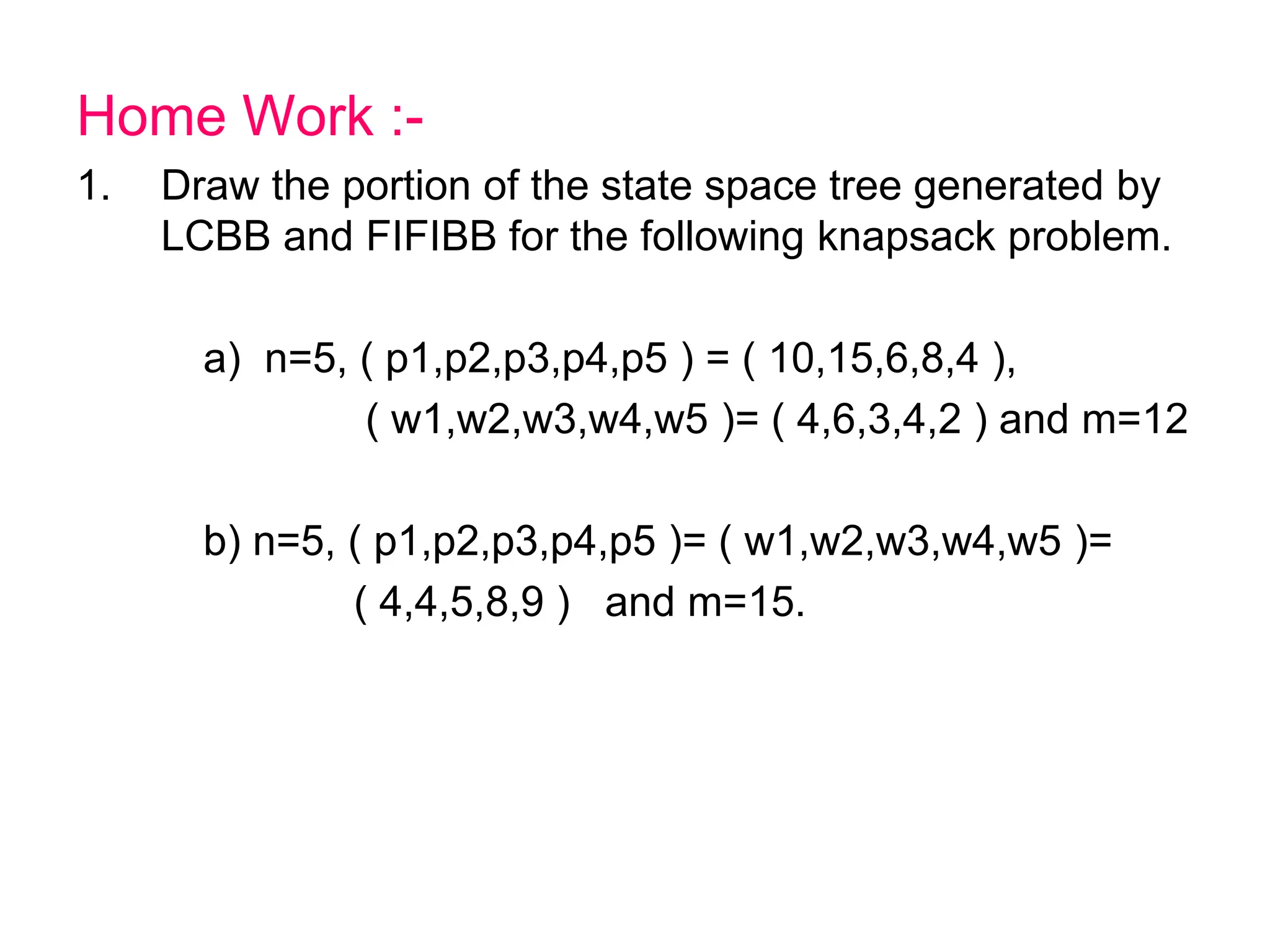
Here are the portions of the state space tree generated by LCBB and FIFOBB for the given knapsack problems:
a) n=5, (p1,p2,p3,p4,p5)=(10,15,6,8,4), (w1,w2,w3,w4,w5)=(4,6,3,4,2) and m=12
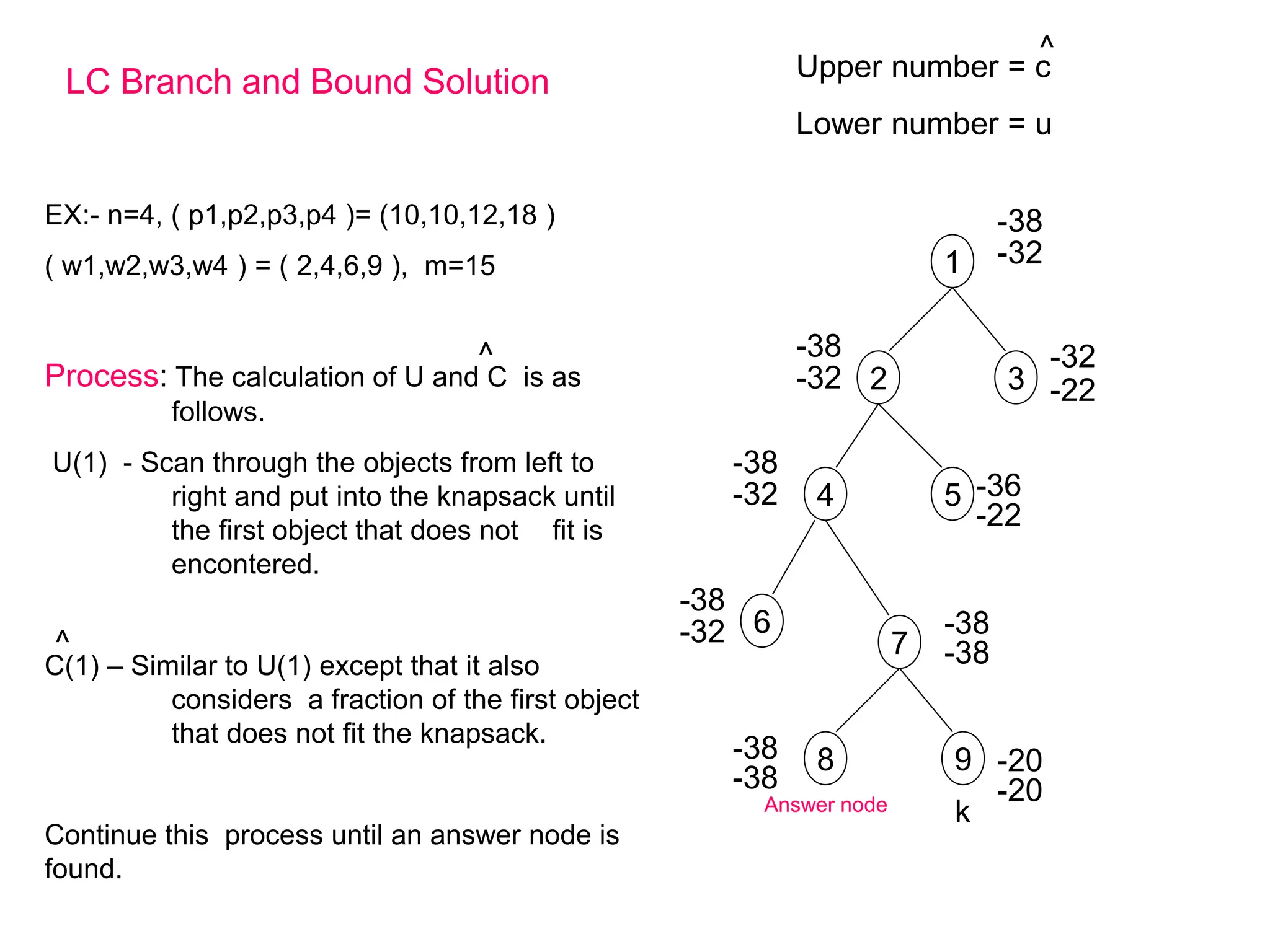
LCBB:
1
2 3 4
7 8 9 10
5 6
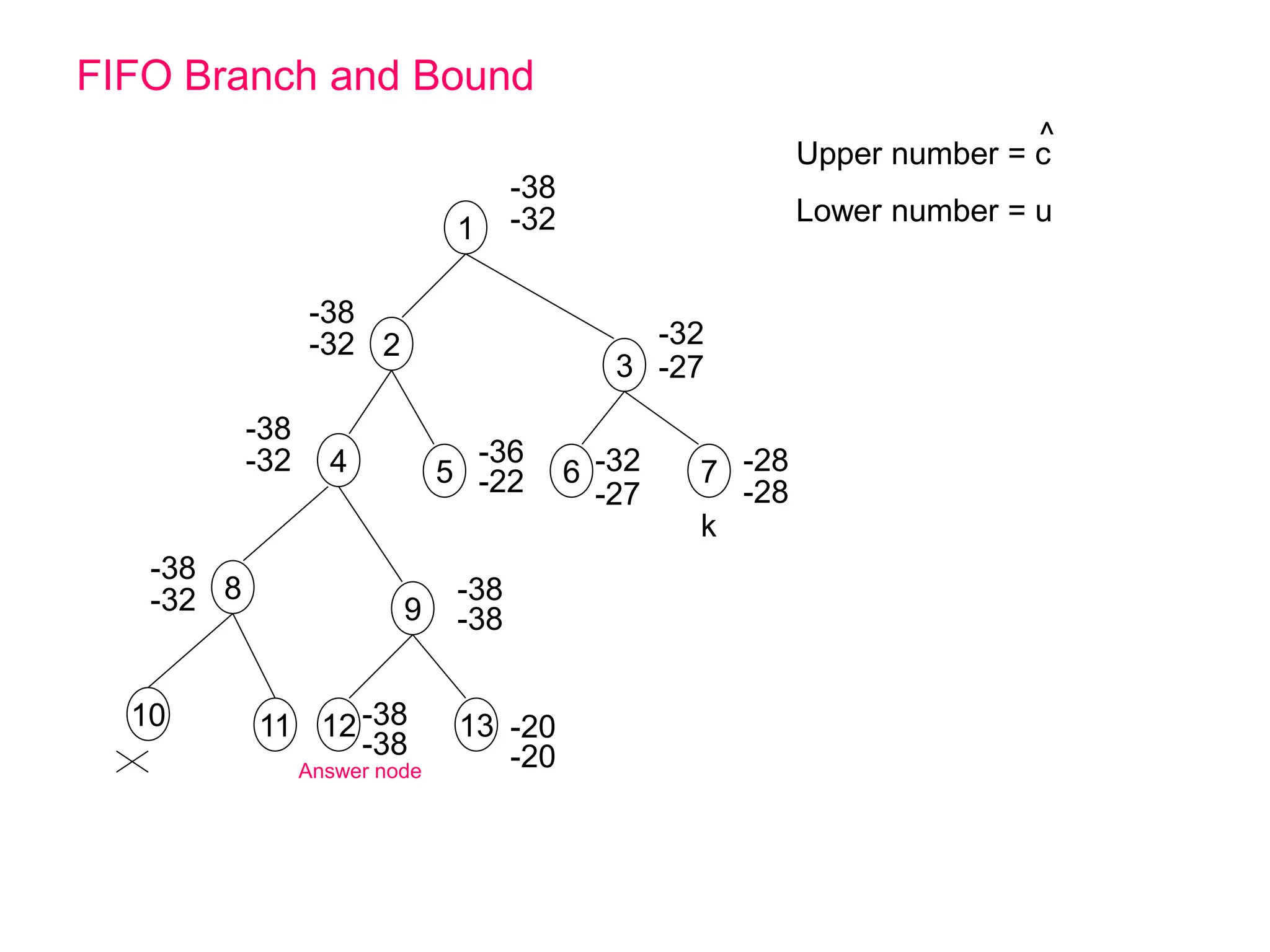
FIFOBB:
1
2
3
7
4
5 6
8 9
b) n=5, (p1,p2,p3,