Download to read offline
![International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 10 Issue: 06 | Jun 2023 www.irjet.net p-ISSN: 2395-0072
© 2023, IRJET | Impact Factor value: 8.226 | ISO 9001:2008 Certified Journal | Page 286
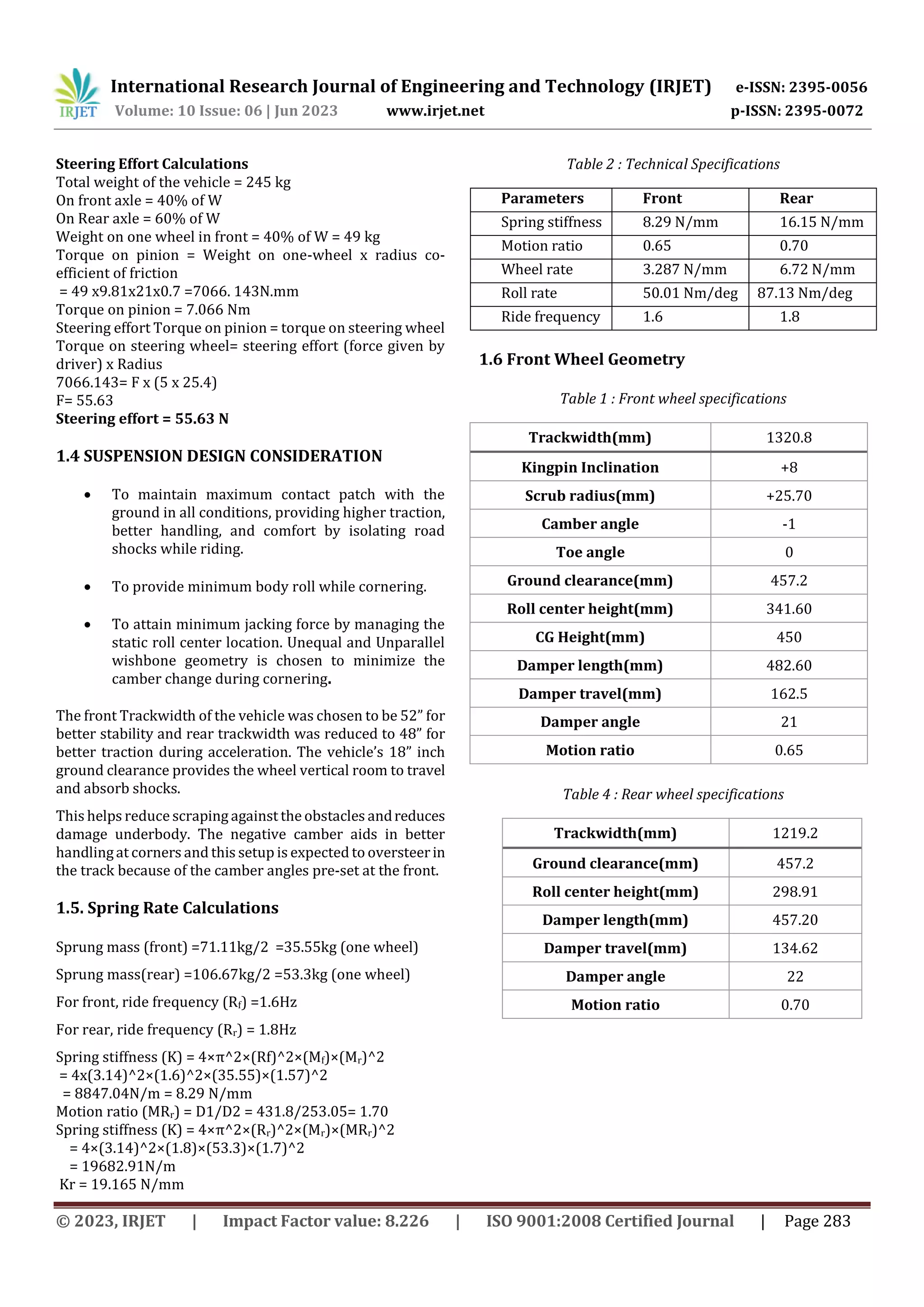
Figure 8 : Undergoing CNC Machining of Knuckle
Figure 9 : Finished Knuckle
4. RESULTS
From the overall design and the analysis of the front and
rear knuckle we have optimized the suspension system for
better off-roading and speed cornering. And the designed
system can take high impact forces which is very important
for an all-terrain vehicle.
The analysis of the control arm helps to understand the
behavior of the suspension systeminheavyloading,braking,
and cornering conditions which helps to study the system in
a better way.
5. CONCLUSION
The design of a knuckle and control arm is critical to the
performance, stability, and safety of a vehicle’s suspension
system. The knuckle and control arm work together to
support the weight of the vehicle, absorb shocks and
vibrations, and provide steering control and stability. The
knuckle is the component that connects the wheel hubto the
suspension system. It typically has a flange that mounts to
the hub and a spindle that connects to the control arm. The
knuckle must be designed to withstand the lateral and
vertical loads that are generated during cornering, braking,
and acceleration.
When designing a knuckle and control arm, several factors
must be considered. These include the material selection,
manufacturing processes, and the specific loads and forces
that the components will encounter during operation.Finite
element analysis and other simulation tools can be used to
test and optimize the design, ensuring that it meets the
necessary strength and durability requirements.
Additionally, the design of a knuckle and control arm should
also consider factors such as ease of installation,
maintenance, and repair. Access to critical components and
ease of disassembly can significantly impact the cost and
time required for maintenance or repairs.
In conclusion, a successful design of a knuckle and control
arm requires careful consideration of many factors,
including strength, durability, manufacturingprocesses, and
maintenance requirements. A well-designed suspension
system can improve the ride quality,handling,andsafetyofa
vehicle, reducing wear and tear on tires and other
components, and enhancing the overall driving experience.
REFERENCES
[1] Shripad Mane “Design and Analysis of Suspension and
Steering system along with the Wheel Assembly of a
BAJA ATV” -International Journal ofInnovativeResearch
in Science, Engineering and Technology
[2] Aditya Shahane, Manasi Kathale, Pratik Rathi and
Ashank Gujar “KINEMATICS OF REAR SUSPENSION
SYSTEM FOR A BAJA ALL-TERRAIN VEHICLE” -
International Journal of Mechanical Engineering and
Technology (IJMET)
[3] Debidutta Mishra “Baja SAE UTEP 2014 Design Report-
Team Jaabaz, VIT University – ResearchGate
[4] Jason Bracco, Coleman DeAnda, Jaime Deschenes Tara
Olson, Austin Sabbagha “SAE Baja Front Suspension” -
Mechanical Engineering Laboratory the George
Washington University School of Engineering and
Applied Sciences
[5] Sumit Sharma “Design Review of SuspensionAssembly
of a BAJA ATV” - International Research Journal of
Engineering and Technology (IRJET)
[6] I. P. Dhurai “Optimization and Effects of Suspension
Parameter on Front Suspension of SAE Baja Vehicle
using ADAMS” - International Journal of Engineering
Research & Technology (IJERT)](https://image.slidesharecdn.com/irjet-v10i642-230710114432-fa6316a7/75/Design-and-Optimization-of-steering-and-Suspension-System-of-All-Terrain-Vehicle-5-2048.jpg)

The document discusses the design and optimization of the steering and suspension system for an all-terrain vehicle (ATV). Calculations were performed to design the springs and steering components. The front and rear suspension systems were simulated using Lotus software. Finite element analysis was conducted on the front and rear knuckles under braking conditions using ANSYS. The results showed maximum stresses below yield strength with safety factors above 2, indicating the designs would withstand the intended loading. The knuckles were then manufactured using CNC machining.



































































