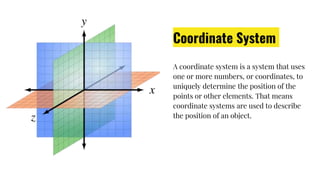
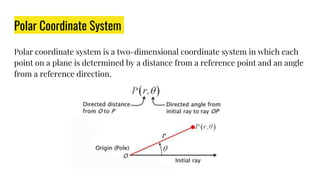
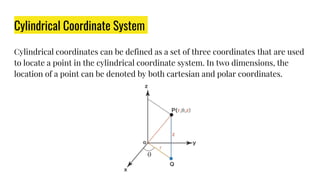
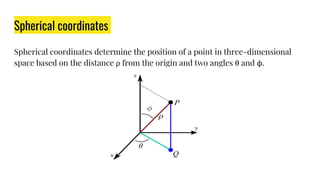
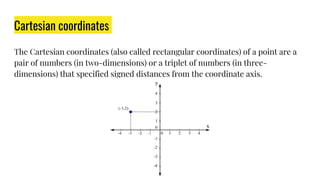
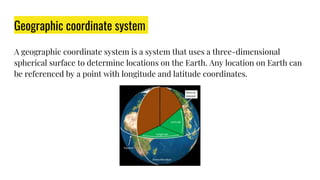
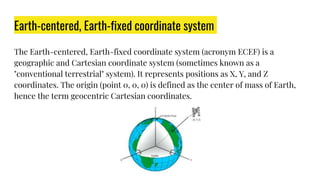
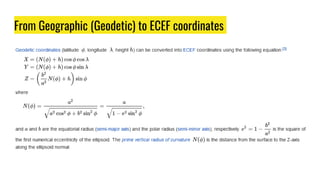
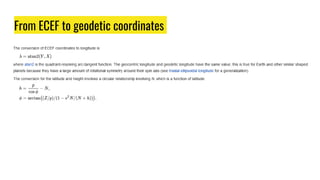
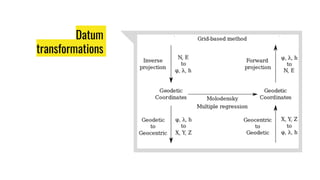
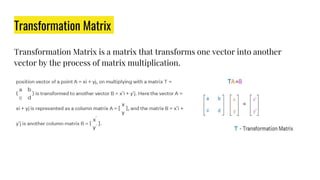
The document provides an overview of various coordinate systems used to determine the position of points or elements, classifying them into categories such as topocentric, geocentric, and more. It discusses specific systems like polar, cylindrical, spherical, and Cartesian coordinates, as well as the geographic coordinate system and the Earth-Centered, Earth-Fixed (ECEF) system. The document also covers concepts like transformation matrices, ellipsoids, geoid, eccentricity, flattening, and the World Geodetic System 1984 (WGS84), which is crucial for GPS navigation.