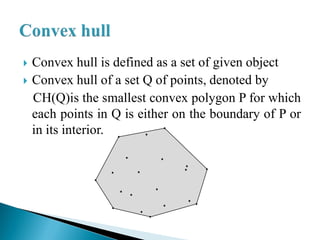
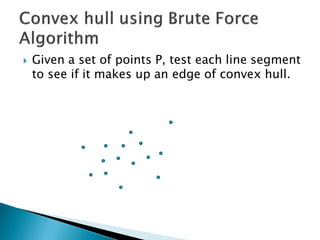
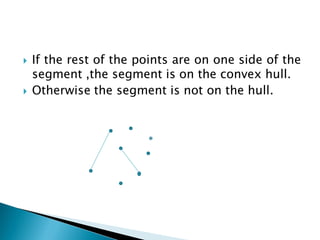
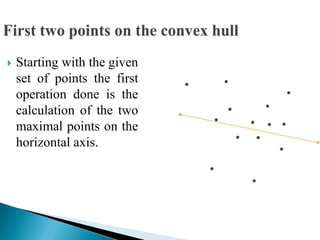
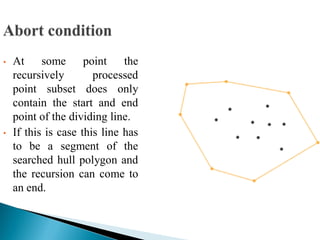
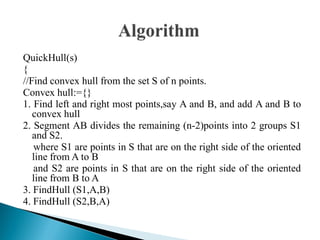
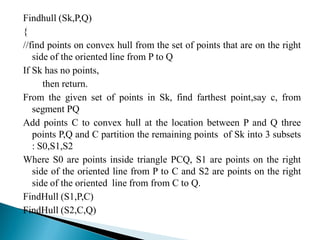
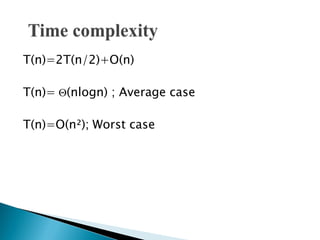
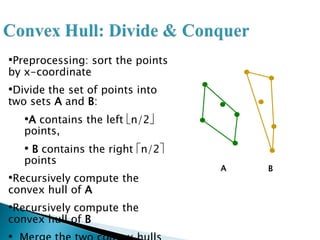
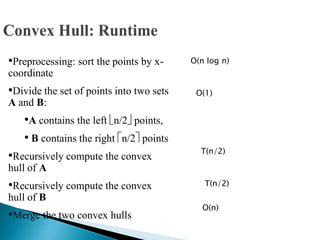
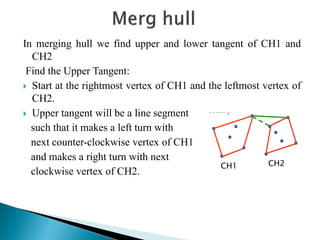
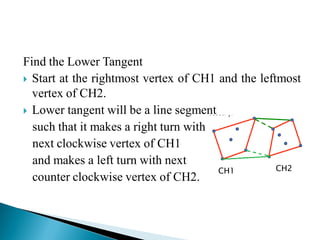
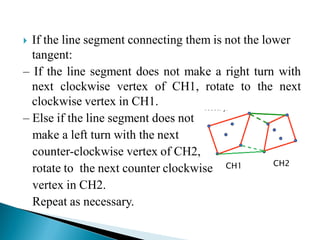
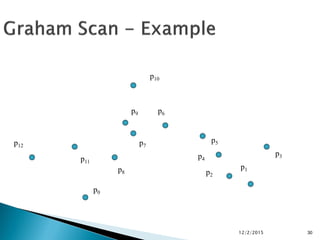
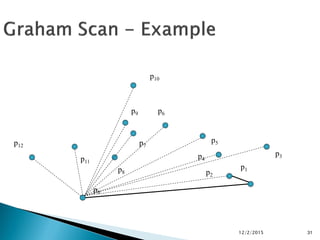
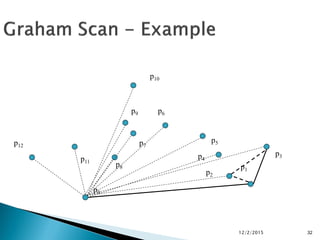
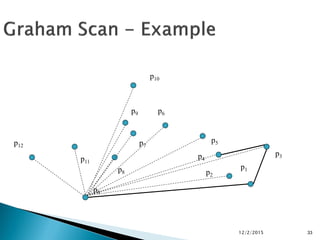
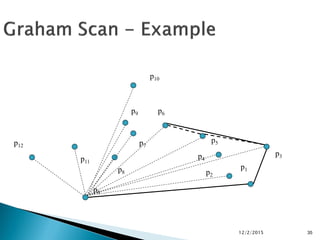
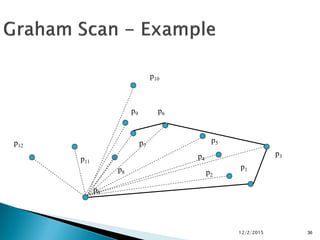
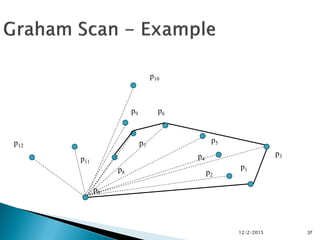
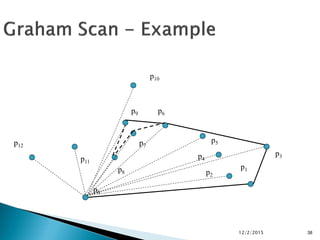
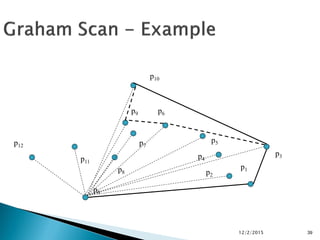
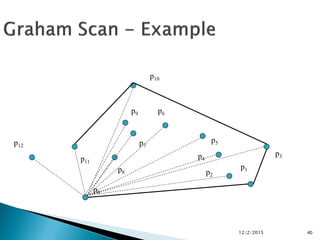
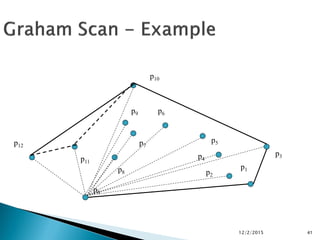
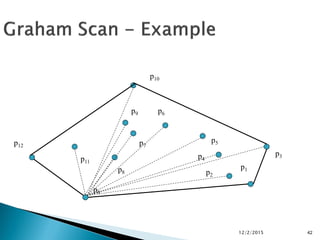
The document discusses several algorithms for computing the convex hull of a set of points, including brute force, quick hull, divide and conquer, Graham's scan, and Jarvis march. It provides details on the time complexity of each algorithm, ranging from O(n^2) for brute force to O(n log n) for quick hull, divide and conquer, and Graham's scan. Jarvis march runs in O(nh) time where h is the number of points on the convex hull.