Downloaded 84 times

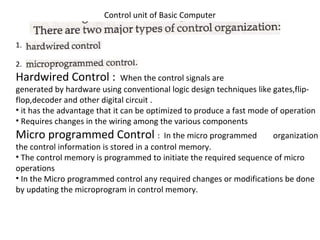

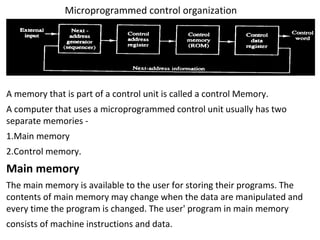





































The document discusses control units in basic computers. It describes hardwired control and microprogrammed control. Hardwired control generates signals using logic gates while microprogrammed control stores control information in a control memory. The control unit initiates sequential microoperations from the control memory. It consists of decoders, counters, and control logic. Arithmetic operations like addition, subtraction, multiplication and division are also summarized for different data types.