Download to read offline

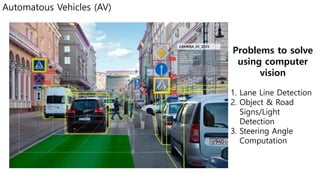





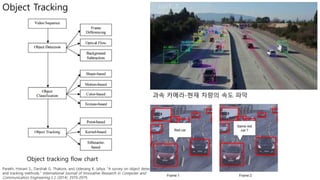



This document discusses computer vision techniques for autonomous vehicles. It describes how computer vision can be used to detect lane lines, objects, and road signs/lights in order to solve problems for autonomous vehicles. It also discusses different levels of autonomous vehicles and provides examples of lane line detection and road sign identification algorithms using techniques like grayscale conversion, Sobel filtering, Hough transforms, and convolutional neural networks. Finally, it summarizes methods for object detection, tracking, and computing steering angles that are important for autonomous vehicle navigation and control.


























![[ 2021 AI + X 여름 캠프 ] 3. computer vision applications](https://cdn.slidesharecdn.com/ss_thumbnails/3-210731153340-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Paper] DetectoRS for Object Detection](https://cdn.slidesharecdn.com/ss_thumbnails/paperdetectorsobjectdetection-210320013551-thumbnail.jpg?width=640&height=640&fit=bounds)












![[111]실내이동체정밀위치추정기술의세가지측면 도락주](https://cdn.slidesharecdn.com/ss_thumbnails/111-161023160508-thumbnail.jpg?width=640&height=640&fit=bounds)





















