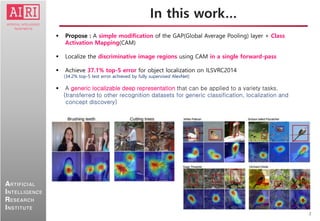
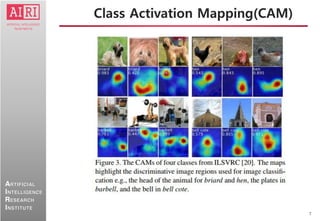
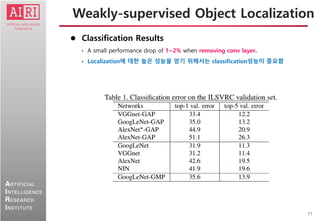
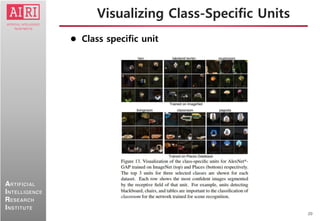
This document summarizes a research paper that proposes a simple modification to convolutional neural networks using global average pooling and class activation mapping to localize discriminative image regions for object detection. The researchers achieved 37.1% top-5 accuracy for object localization on ILSVRC2014, compared to 34.2% for a fully supervised model. They also showed how the method can be applied to other tasks like fine-grained recognition, pattern discovery, and interpreting visual question answering by visualizing discriminative regions.
![4
ARTIFICIAL
INTELLIGENCE
RESEARCH
INSTITUTE
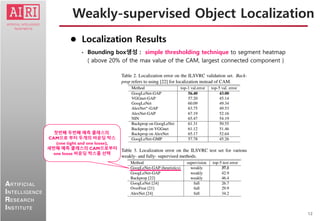
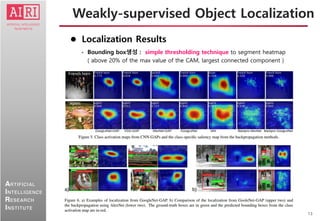
Weakly-supervised Object Localization
• Not end-to-end system [1,2,15]
• Require multiple forward passes of a network [1,2,15]
• Global max pooling (point localization) [16]
• End-to-end system, single forward pass, global average pooling
• GAP자체보다는 accurate discriminative localization에 적용될 수 있다는
observation이 contribution 이라고 주장함.
Related Work](https://image.slidesharecdn.com/pr047-cam-171112115212/85/PR12-CAM-4-320.jpg)














![Objects as points (CenterNet) review [CDM]](https://cdn.slidesharecdn.com/ss_thumbnails/objectsaspointscenternetreviewcdm-200327113331-thumbnail.jpg?width=640&height=640&fit=bounds)


















![제 14회 보아즈(BOAZ) 빅데이터 컨퍼런스 - [BICS팀] : Boaz Industry Classification Standard](https://cdn.slidesharecdn.com/ss_thumbnails/bics-210806012608-thumbnail.jpg?width=640&height=640&fit=bounds)