Downloaded 47 times






![14
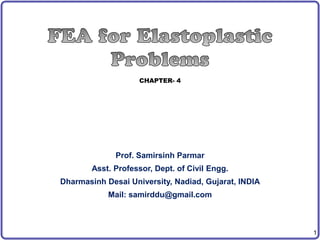
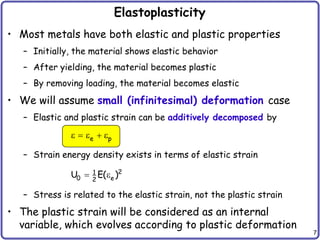
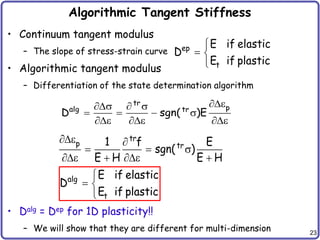
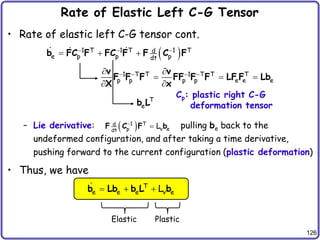
1D Finite Element Formulation
• Load increment
– applied load is divided by N increments: [t1, t2, …, tN]
– analysis procedure has been completed up to load increment tn
– a new solution at tn+1 is sought using the Newton-Raphson method
– iteration k has been finished and the current iteration is k+1
• Displacement increments
– From last increment tn:
– From previous iteration:
x1 x2
u1 u2
P1 P2
L
k n 1 k n
k n 1 k 1 n 1 k
d d d
d d d
1
2
u
u
d](https://image.slidesharecdn.com/chap-4feaforelastoplasticproblems-230201060657-7c6360bb/85/Chap-4-FEA-for-Elastoplastic-Problems-pptx-14-320.jpg)
![15
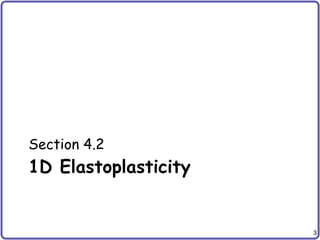
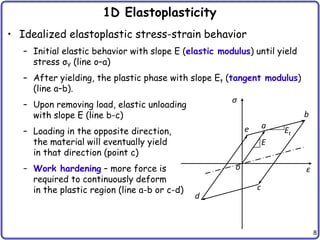
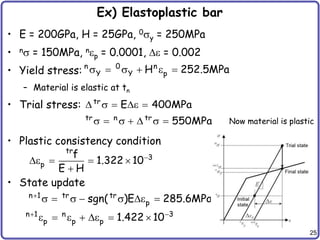
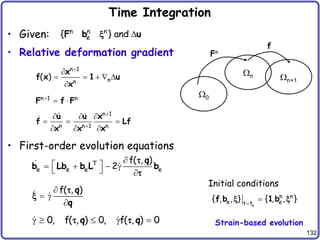
1D FE Formulation cont.
• Interpolation
• Weak form (1 element)
– Internal force = external force
1
1 2
2
u
u(x) [N N ]
u
N d
1
2
u
d 1 1
u
dx L L u
e
B d
u
e
N d
B d
L
T T n 1 k 1 T n 1 2
0
Adx , R
s
d B d F d 1
2
u
u
d](https://image.slidesharecdn.com/chap-4feaforelastoplasticproblems-230201060657-7c6360bb/85/Chap-4-FEA-for-Elastoplastic-Problems-pptx-15-320.jpg)












![32
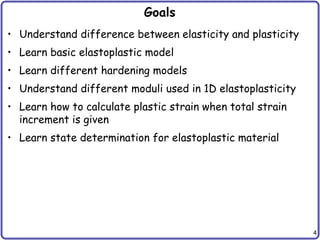
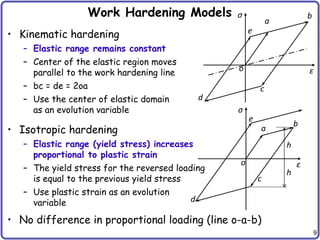
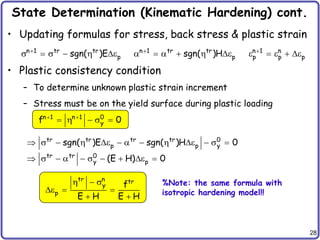
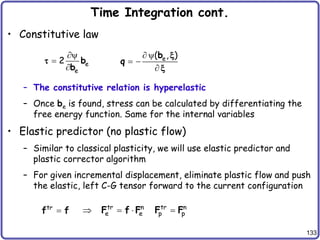
MATLAB Program combHard1D
%
% 1D Linear combined isotropic/kinamtic hardening model
%
function [stress, alpha, ep]=combHard1D(mp, deps, stressN, alphaN, epN)
% Inputs:
% mp = [E, beta, H, Y0];
% deps = strain increment
% stressN = stress at load step N
% alphaN = back stress at load step N
% epN = plastic strain at load step N
%
E=mp(1); beta=mp(2); H=mp(3); Y0=mp(4); %material properties
ftol = Y0*1E-6; %tolerance for yield
stresstr = stressN + E*deps; %trial stress
etatr = stresstr - alphaN; %trial shifted stress
fyld = abs(etatr) - (Y0+(1-beta)*H*epN); %trial yield function
if fyld < ftol %yield test
stress = stresstr; alpha = alphaN; ep = epN;%trial states are final
return;
else
dep = fyld/(E+H); %plastic strain increment
end
stress = stresstr - sign(etatr)*E*dep; %updated stress
alpha = alphaN + sign(etatr)*beta*H*dep; %updated back stress
ep = epN + dep; %updated plastic strain
return;](https://image.slidesharecdn.com/chap-4feaforelastoplasticproblems-230201060657-7c6360bb/85/Chap-4-FEA-for-Elastoplastic-Problems-pptx-32-320.jpg)
![33
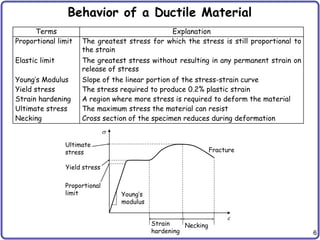
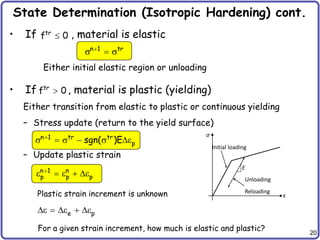
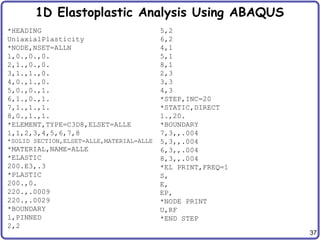
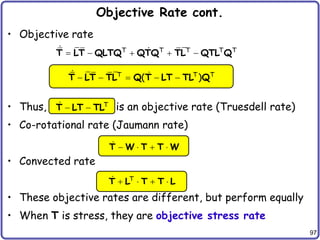
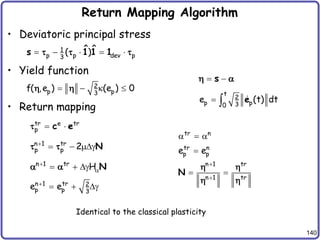
Ex) Two bars in parallel
• Bar 1: A = 0.75, E = 10000, Et = 1000, 0sY = 5, kinematic
• Bar 2: A = 1.25, E = 5000, Et = 500, 0sY = 7.5, isotropic
• MATLAB program
%
% Example 4.5 Two elastoplastic bars in parallel
%
E1=10000; Et1=1000; sYield1=5;
E2=5000; Et2=500; sYield2=7.5;
mp1 = [E1, 1, E1*Et1/(E1-Et1), sYield1];
mp2 = [E2, 0, E2*Et2/(E2-Et2), sYield2];
nS1 = 0; nA1 = 0; nep1 = 0;
nS2 = 0; nA2 = 0; nep2 = 0;
A1 = 0.75; L1 = 100;
A2 = 1.25; L2 = 100;
tol = 1.0E-5; u = 0; P = 15; iter = 0;
Res = P - nS1*A1 - nS2*A2;
Dep1 = E1; Dep2 = E2;
conv = Res^2/(1+P^2);
fprintf('niter u S1 S2 A1 A2');
fprintf(' ep1 ep2 Residual');
fprintf('n %3d %7.4f %7.3f %7.3f %7.3f %7.3f %8.6f %8.6f %10.3e',...
iter,u,nS1,nS2,nA1,nA2,nep1,nep2,Res);
Bar1
Bar2
Rigid 15](https://image.slidesharecdn.com/chap-4feaforelastoplasticproblems-230201060657-7c6360bb/85/Chap-4-FEA-for-Elastoplastic-Problems-pptx-33-320.jpg)
![34
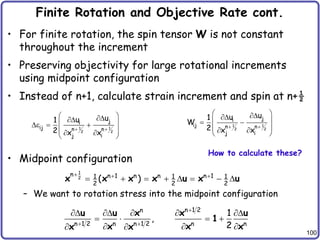
Ex) Two bars in parallel cont.
while conv > tol && iter < 20
delu = Res / (Dep1*A1/L1 + Dep2*A2/L2);
u = u + delu;
delE = delu / L1;
[Snew1, Anew1, epnew1]=combHard1D(mp1,delE,nS1,nA1,nep1);
[Snew2, Anew2, epnew2]=combHard1D(mp2,delE,nS2,nA2,nep2);
Res = P - Snew1*A1 - Snew2*A2;
conv = Res^2/(1+P^2);
iter = iter + 1;
Dep1 = E1; if epnew1 > nep1; Dep1 = Et1; end
Dep2 = E2; if epnew2 > nep2; Dep2 = Et2; end
nS1 = Snew1; nA1 = Anew1; nep1 = epnew1;
nS2 = Snew2; nA2 = Anew2; nep2 = epnew2;
fprintf('n %3d %7.4f %7.3f %7.3f %7.3f %7.3f %8.6f %8.6f %10.3e',...
iter,u,nS1,nS2,nA1,nA2,nep1,nep2,Res);
end
Iteration u s1 s2 ep1 ep2 Residual
0 0.0000 0.000 0.000 0.000000 0.000000 1.50E+1
1 0.1091 5.591 5.455 0.000532 0.000000 3.99E+0
2 0.1661 6.161 7.580 0.001045 0.000145 9.04E 1
3 0.2318 6.818 7.909 0.001636 0.000736 0.00E+0](https://image.slidesharecdn.com/chap-4feaforelastoplasticproblems-230201060657-7c6360bb/85/Chap-4-FEA-for-Elastoplastic-Problems-pptx-34-320.jpg)




![44
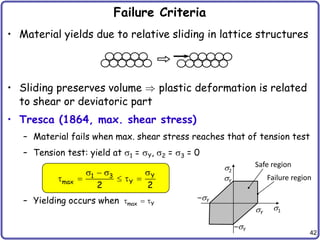
Failure Criteria cont.
• Example: Linear elastic material
• Distortion energy density
[ 2 ] : :
1 1 I D
s e e
m m
m
(3 ) 2 ( )
(3 2 ) 2
deviatoric
volumetric
s e e
e
1 e 1
1 e
m m
(3 2 )
2
s e
s e
1 1
d 2 4
U : :
s e s s
3
1 1 1
m m m m
2 2 2 2
U : ( ) : ( ) :
s e s e
1 s 1 e s e
s e
Bulk modulus
3 2
K
3
](https://image.slidesharecdn.com/chap-4feaforelastoplasticproblems-230201060657-7c6360bb/85/Chap-4-FEA-for-Elastoplastic-Problems-pptx-44-320.jpg)



![49
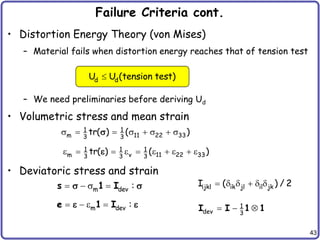
Von Mises Criterion cont.
• J2: second invariant of s
• Von Mises yield function
2
1 1
2 2 2
J [ : tr( ) ] :
s s s s s
2
2 Y
3J 0
s
2
3
Y
2
: 0
s
s s
2
Y
3
: 0
s
s s
2
Y
3
0
s
s
Yield function
s1
s2
2
Y
3
s
s
radius
Elastic
state
Impossible
state
Material
yields
Yield surface is circular in
deviatoric stress space](https://image.slidesharecdn.com/chap-4feaforelastoplasticproblems-230201060657-7c6360bb/85/Chap-4-FEA-for-Elastoplastic-Problems-pptx-49-320.jpg)

![54
Hardening Model cont.
• Combined Hardening
– Many materials show both isotropic and kinematic hardenings
– Introduce a parameter [0, 1] to consider this effect
– Baushinger effect: The yield stress increases in one directional
loading. But it decreases in the opposite directional load.
– This is caused by dislocation pileups and tangles (back stress).
When strain direction is changed, this makes the dislocations easy
to move
– Isotropic hardening: = 0
– Kinematic hardening: = 1
0
2
Y p
3
[ (1 )He ] 0
s
2
p
3
He
](https://image.slidesharecdn.com/chap-4feaforelastoplasticproblems-230201060657-7c6360bb/85/Chap-4-FEA-for-Elastoplastic-Problems-pptx-54-320.jpg)









![65
Example: Linear hardening model
• Linear combined hardening model, associative flow rule
• 5 params: 2 elastic (, ) and 3 plastic (, H, sY
0) variables
• Plastic consistency parameter
k s p
0 2
p Y p 3
(e ) (1 )He He
s
0
2
p Y p
3
f( , ,e ) [ (1 )He ] 0
s s
2
p p
3
p
f f f
f : : e : : (1 )He 0
e
s N s N
s
g
g
g
p
p
2 2
3 3
2
p 3
2 2 2
H H
e
s e e e N
e N](https://image.slidesharecdn.com/chap-4feaforelastoplasticproblems-230201060657-7c6360bb/85/Chap-4-FEA-for-Elastoplastic-Problems-pptx-65-320.jpg)









![78
Implementation of Elastoplasticity
• We will explain for a 3D solid element at a Gauss point
• Voigt notation
• Inputs
(a) Finite Element (b) Reference Element
x
z
(1,1,–1)
(1,1,1)
(–1,1,1)
(–1,1,–1)
x1
x2
x3
x4
x5
x6
x7
x8
x2
x1
x3
(1, –1,–1)
(1, –1,1)
(–1, –1,1)
T
11 22 33 12 23 13
{ } [ ]
s s s s s s
s
T
11 22 33 12 23 13
{ } [ 2 2 2 ]
e e e e e e
e
T
I I1 I2 I3
d d d
d
T
n n n n n n n
11 22 33 12 23 13
s s s s s s
s
T
n n n n n n n n
11 22 33 12 23 13 p
e
x](https://image.slidesharecdn.com/chap-4feaforelastoplasticproblems-230201060657-7c6360bb/85/Chap-4-FEA-for-Elastoplastic-Problems-pptx-78-320.jpg)

![80
Return Mapping Algorithm
• Elastic predictor
– Unit tensor
– Trial stress
– Trace of stress
– Shifted stress
– Norm
– Yield function
T
1 1 1 0 0 0
1
tr n
C
s s e
tr tr tr
11 22 33
tr( ) s s s
s
tr tr n
1
3
tr( )
s s
tr tr 2 tr 2 tr 2 tr 2 tr 2 tr 2
11 22 33 12 23 13
( ) ( ) ( ) 2[( ) ( ) ( ) ]
tr 0 n
2
Y p
3
f (1 )He
s
](https://image.slidesharecdn.com/chap-4feaforelastoplasticproblems-230201060657-7c6360bb/85/Chap-4-FEA-for-Elastoplastic-Problems-pptx-80-320.jpg)

![82
Implementation of Elastoplasticity cont.
• Consistent tangent matrix
• Internal force and tangent stiffness matrix
• Solve for incremental displacement
• The algorithm repeats until the residual reduces to zero
• Once the solution converges, save stress and plastic
variables and move to next load step
2 2
1 2
2 tr
3
4 4
c c
2 H
g
alg T
1 2 2 dev
(c c ) c
D D NN I
ext int
T
[ ]{ } { } { }
K u f f
4 NG
int T n 1
I K K
I 1K 1
( )
f B J
s
4 4 NG
alg
T
T I J K K
I 1 J 1K 1
( )
K B D B J
2 1 1
3 3 3
1 2 1
3 3 3
1 1 2
dev 3 3 3
1
2
1
2
1
2
0 0 0
0 0 0
0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
I](https://image.slidesharecdn.com/chap-4feaforelastoplasticproblems-230201060657-7c6360bb/85/Chap-4-FEA-for-Elastoplastic-Problems-pptx-82-320.jpg)
![83
Program combHard.m
%
% Linear combined isotropic/kinematic hardening model
%
function [stress, alpha, ep]=combHard(mp,D,deps,stressN,alphaN,epN)
% Inputs:
% mp = [lambda, mu, beta, H, Y0];
% D = elastic stiffness matrix
% stressN = [s11, s22, s33, t12, t23, t13];
% alphaN = [a11, a22, a33, a12, a23, a13];
%
Iden = [1 1 1 0 0 0]';
two3 = 2/3; stwo3=sqrt(two3); %constants
mu=mp(2); beta=mp(3); H=mp(4); Y0=mp(5); %material properties
ftol = Y0*1E-6; %tolerance for yield
%
stresstr = stressN + D*deps; %trial stress
I1 = sum(stresstr(1:3)); %trace(stresstr)
str = stresstr - I1*Iden/3; %deviatoric stress
eta = str - alphaN; %shifted stress
etat = sqrt(eta(1)^2 + eta(2)^2 + eta(3)^2 ...
+ 2*(eta(4)^2 + eta(5)^2 + eta(6)^2));%norm of eta
fyld = etat - stwo3*(Y0+(1-beta)*H*epN); %trial yield function
if fyld < ftol %yield test
stress = stresstr; alpha = alphaN; ep = epN;%trial states are final
return;
else
gamma = fyld/(2*mu + two3*H); %plastic consistency param
ep = epN + gamma*stwo3; %updated eff. plastic strain
end
N = eta/etat; %unit vector normal to f
stress = stresstr - 2*mu*gamma*N; %updated stress
alpha = alphaN + two3*beta*H*gamma*N; %updated back stress](https://image.slidesharecdn.com/chap-4feaforelastoplasticproblems-230201060657-7c6360bb/85/Chap-4-FEA-for-Elastoplastic-Problems-pptx-83-320.jpg)
![84
Program combHardTan.m
function [Dtan]=combHardTan(mp,D,deps,stressN,alphaN,epN)
% Inputs:
% mp = [lambda, mu, beta, H, Y0];
% D = elastic stiffness matrix
% stressN = [s11, s22, s33, t12, t23, t13];
% alphaN = [a11, a22, a33, a12, a23, a13];
%
Iden = [1 1 1 0 0 0]';
two3 = 2/3; stwo3=sqrt(two3); %constants
mu=mp(2); beta=mp(3); H=mp(4); Y0=mp(5); %material properties
ftol = Y0*1E-6; %tolerance for yield
stresstr = stressN + D*deps; %trial stress
I1 = sum(stresstr(1:3)); %trace(stresstr)
str = stresstr - I1*Iden/3; %deviatoric stress
eta = str - alphaN; %shifted stress
etat = sqrt(eta(1)^2 + eta(2)^2 + eta(3)^2 ...
+ 2*(eta(4)^2 + eta(5)^2 + eta(6)^2));%norm of eta
fyld = etat - stwo3*(Y0+(1-beta)*H*epN); %trial yield function
if fyld < ftol %yield test
Dtan = D; return; %elastic
end
gamma = fyld/(2*mu + two3*H); %plastic consistency param
N = eta/etat; %unit vector normal to f
var1 = 4*mu^2/(2*mu+two3*H);
var2 = 4*mu^2*gamma/etat; %coefficients
Dtan = D - (var1-var2)*N*N' + var2*Iden*Iden'/3;%tangent stiffness
Dtan(1,1) = Dtan(1,1) - var2; %contr. from 4th-order I
Dtan(2,2) = Dtan(2,2) - var2;
Dtan(3,3) = Dtan(3,3) - var2;
Dtan(4,4) = Dtan(4,4) - .5*var2;
Dtan(5,5) = Dtan(5,5) - .5*var2;
Dtan(6,6) = Dtan(6,6) - .5*var2;](https://image.slidesharecdn.com/chap-4feaforelastoplasticproblems-230201060657-7c6360bb/85/Chap-4-FEA-for-Elastoplastic-Problems-pptx-84-320.jpg)
![85
Program PLAST3D.m
function PLAST3D(MID, PROP, ETAN, UPDATE, LTAN, NE, NDOF, XYZ, LE)
%***********************************************************************
% MAIN PROGRAM COMPUTING GLOBAL STIFFNESS MATRIX RESIDUAL FORCE FOR
% PLASTIC MATERIAL MODELS
%***********************************************************************
%%
....
%LOOP OVER ELEMENTS, THIS IS MAIN LOOP TO COMPUTE K AND F
for IE=1:NE
DSP=DISPTD(IDOF);
DSPD=DISPDD(IDOF);
%....
% LOOP OVER INTEGRATION POINTS
for LX=1:2, for LY=1:2, for LZ=1:2
%
% Previous converged history variables
NALPHA=6;
STRESSN=SIGMA(1:6,INTN);
ALPHAN=XQ(1:NALPHA,INTN);
EPN=XQ(NALPHA+1,INTN);
....
% Computer stress, back stress & effective plastic strain
if MID == 1
% Infinitesimal plasticity
[STRESS, ALPHA, EP]=combHard(PROP,ETAN,DDEPS,STRESSN,ALPHAN,EPN);
....
%
% Tangent stiffness
if LTAN
if MID == 1
DTAN=combHardTan(PROP,ETAN,DDEPS,STRESSN,ALPHAN,EPN);
EKF = BM'*DTAN*BM;
....](https://image.slidesharecdn.com/chap-4feaforelastoplasticproblems-230201060657-7c6360bb/85/Chap-4-FEA-for-Elastoplastic-Problems-pptx-85-320.jpg)







![95
Cauchy Stress Is an Objective Tensor
• Proof from the relation between stresses
• Proof from coordinate transformation of stress tensor
– Coordinate transformation is opposite to rotation
s T
1
J
FSF
S S
s s
T T T T T T
1 1 1
J J J
FSF QFSF Q Q FSF Q Q Q
x
y
z
x
y
z
b1
b2
b3
s s
1 2 3
( ) ( ) ( ) 1 2 3
xyz xyz xyz
[ ] [ ] [ ] [ ] [ ]
b b b
T T T b b b Q
s s
T
x y z xyz
[ ] [ ] [ ] [ ]
Q Q
s s T
xyz xyz
[ ] [ ][ ] [ ]
Q Q](https://image.slidesharecdn.com/chap-4feaforelastoplasticproblems-230201060657-7c6360bb/85/Chap-4-FEA-for-Elastoplastic-Problems-pptx-95-320.jpg)




![102
Program rotatedStress.m
%
% Rotate stress and back stress to the rotation-free configuration
%
function [stress, alpha] = rotatedStress(L, S, A)
%L = [dui/dxj] velocity gradient
%
str=[S(1) S(4) S(6);S(4) S(2) S(5);S(6) S(5) S(3)];
alp=[A(1) A(4) A(6);A(4) A(2) A(5);A(6) A(5) A(3)];
factor=0.5;
R = L*inv(eye(3) + factor*L);
W = .5*(R-R');
R = eye(3) + inv(eye(3) - factor*W)*W;
str = R*str*R';
alp = R*alp*R';
stress=[str(1,1) str(2,2) str(3,3) str(1,2) str(2,3) str(1,3)]';
alpha =[alp(1,1) alp(2,2) alp(3,3) alp(1,2) alp(2,3) alp(1,3)]';](https://image.slidesharecdn.com/chap-4feaforelastoplasticproblems-230201060657-7c6360bb/85/Chap-4-FEA-for-Elastoplastic-Problems-pptx-102-320.jpg)


![107
Linearization cont.
• Linearization of energy form cont.
– Express inside of [ ] in terms of
– Constitutive relation:
– Spin term
n 1
n 1
n n 1 T
n 1 n 1
J T
n 1 n 1
L[a( ; , )] : div( ) ( ) d
: div( ) ( ) d
u u u u u
u W W u u
x s s s
s s s s s
alg alg
J
n 1
: : ( )
D D u
s e
n 1
u
m k
i
m i l
u u
u
1 1
im mj mj mj ik ml mk il
2 x x 2 x
1
lj ik kj il n 1 kl
2
W ( ) ( )
( )[ ]
s s s
s s u
1
im mj il jk ik jl n 1 kl
2
W ( )[ ]
s s s u
k
k
u
ij ij kl n 1 kl
x
[ ]
s s u
j
m
u
im il jk n 1 kl
x
[ ]
s s u](https://image.slidesharecdn.com/chap-4feaforelastoplasticproblems-230201060657-7c6360bb/85/Chap-4-FEA-for-Elastoplastic-Problems-pptx-107-320.jpg)
![108
Linearization cont.
• Linearization of energy form cont.
– Initial stiffness term (we need to separate this term)
– Define
n 1
J T
n 1 n 1
L[a( , )] : div( ) ( ) d
u u u W W u u
s s s s s
1
jl ik jk il il jk ik jl ij kl
2
( )
s s s s s
m m m m k
i
r s r s j l
T
n 1 n 1
u u u u u
u
1
rs jl ik
2 x x x x x x
: sym( ) : ( , )
( )
s s
u u u u
s s
* 1
ijkl ij kl il jk jl ik ik jl jk il
2
( )
s s s s s
D
Rotational effect of Cauchy stress tensor](https://image.slidesharecdn.com/chap-4feaforelastoplasticproblems-230201060657-7c6360bb/85/Chap-4-FEA-for-Elastoplastic-Problems-pptx-108-320.jpg)
![109
Linearization cont.
• Linearization of energy form cont.
• N-R iteration
* n n 1 n n 1
k k 1 k
a ( , ; , ) ( ) a( ; , ),
u u u u u u u
x x Z
n 1
alg
n n 1 *
n 1 n 1
* n n 1
L[a( ; , )] : ( ) : : ) d
a ( , ; , )
u u u D D u u u
u u u
x s
x
Bilinear
History-dependent
(implicit)](https://image.slidesharecdn.com/chap-4feaforelastoplasticproblems-230201060657-7c6360bb/85/Chap-4-FEA-for-Elastoplastic-Problems-pptx-109-320.jpg)
![110
Implementation
• We will explain using a 3D solid element at a Gauss point
using updated Lagrangian form
• The return mapping and consistent tangent operator will
be the same with infinitesimal plasticity
• Voigt Notation
• Inputs
T
11 22 33 12 23 13
{ } [ ]
s s s s s s
s
T
11 22 33 12 23 13
{ } [ 2 2 2 ]
e e e e e e
e
T
I I1 I2 I3
d d d
d
T
n n n n n n n
11 22 33 12 23 13
s s s s s s
s
T
n n n n n n n n
11 22 33 12 23 13 p
e
x](https://image.slidesharecdn.com/chap-4feaforelastoplasticproblems-230201060657-7c6360bb/85/Chap-4-FEA-for-Elastoplastic-Problems-pptx-110-320.jpg)
![114
Implementation cont.
• Internal force
• Tangent stiffness matrix
• Initial stiffness matrix
4 NG
int T n 1
I k 1 K K
I 1K 1
( )
f B J
s
4 4 NG
alg
T *
T I J K K
I 1 J 1K 1
[ ( ) ]
K B D D B J
11 11 11 12 13
22 22 22 12 23
33 33 33 23 13
*
1 1 1
12 12 11 22 13 23
2 2 2
1 1 1
23 23 13 22 33 12
2 2 2
1 1 1
13 13 23 12 11 33
2 2 2
0
0
0
0 ( )
0 ( )
0 ( )
s s s s s
s s s s s
s s s s s
s s s s s s
s s s s s s
s s s s s s
D
T
4 4 NG
G G
S I J K K
I 1 J 1K 1
[ ]
K B B J
I,1
I,2
I,3
I,1
G
I,2
I
I,3
I,1
I,2
I,3
N 0 0
N 0 0
N 0 0
0 N 0
0 N 0
[ ]
0 N 0
0 0 N
0 0 N
0 0 N
B
9x9
[ ]
0 0
0 0
0 0
s
s
s
This summation is similar to
assembly (must be added to the
corresponding DOFs)](https://image.slidesharecdn.com/chap-4feaforelastoplasticproblems-230201060657-7c6360bb/85/Chap-4-FEA-for-Elastoplastic-Problems-pptx-114-320.jpg)
![115
Implementation cont.
• Solve for incremental displacement
• Update displacements
• When N-R iteration converges
– Stress and history dependent variables are stored (updated) to
the global array
– Move on to the next load step
ext int
T S k 1
[ ]{ } { } { }
K K d f f
n 1 n 1
k 1 k k 1
k 1 k 1 k 1
d d d
d d d](https://image.slidesharecdn.com/chap-4feaforelastoplasticproblems-230201060657-7c6360bb/85/Chap-4-FEA-for-Elastoplastic-Problems-pptx-115-320.jpg)
![116
Program PLAST3D.m
function PLAST3D(MID, PROP, ETAN, UPDATE, LTAN, NE, NDOF, XYZ, LE)
%***********************************************************************
% MAIN PROGRAM COMPUTING GLOBAL STIFFNESS MATRIX RESIDUAL FORCE FOR
% PLASTIC MATERIAL MODELS
%***********************************************************************
....
% Computer stress, back stress & effective plastic strain
elseif MID == 2
% Plasticity with finite rotation
FAC=FAC*det(F);
[STRESSN, ALPHAN] = rotatedStress(DEPS, STRESSN, ALPHAN);
[STRESS, ALPHA, EP]=combHard(PROP,ETAN,DDEPS,STRESSN,ALPHAN,EPN);
....
%
% Tangent stiffness
if LTAN
elseif MID == 2
DTAN=combHardTan(PROP,ETAN,DDEPS,STRESSN,ALPHAN,EPN);
CTAN=[-STRESS(1) STRESS(1) STRESS(1) -STRESS(4) 0 -STRESS(6);
STRESS(2) -STRESS(2) STRESS(2) -STRESS(4) -STRESS(5) 0;
STRESS(3) STRESS(3) -STRESS(3) 0 -STRESS(5) -STRESS(6);
-STRESS(4) -STRESS(4) 0 -0.5*(STRESS(1)+STRESS(2)) -0.5*STRESS(6) -0.5*STRESS(5);
0 -STRESS(5) -STRESS(5) -0.5*STRESS(6) -0.5*(STRESS(2)+STRESS(3)) -0.5*STRESS(4);
-STRESS(6) 0 -STRESS(6) -0.5*STRESS(5) -0.5*STRESS(4) -0.5*(STRESS(1)+STRESS(3))];
SIG=[STRESS(1) STRESS(4) STRESS(6);
STRESS(4) STRESS(2) STRESS(5);
STRESS(6) STRESS(5) STRESS(3)];
SHEAD=zeros(9);
SHEAD(1:3,1:3)=SIG;
SHEAD(4:6,4:6)=SIG;
SHEAD(7:9,7:9)=SIG;
EKF = BM'*(DTAN+CTAN)*BM + BG'*SHEAD*BG;
....](https://image.slidesharecdn.com/chap-4feaforelastoplasticproblems-230201060657-7c6360bb/85/Chap-4-FEA-for-Elastoplastic-Problems-pptx-116-320.jpg)














![137
Return Mapping in Principal Stress Space
• Principal stress vector
• Logarithmic elastic principal strain vector
• Free energy for J2 plasticity
• Constitutive relation in principal space
– Linear relation between principal Kirchhoff stress and logarithmic
elastic principal strain
T
p p1 p2 p3
[ , , ]
T T
1 2 3 1 2 3
[e e e ] [log log log ]
e
2 2 2 2
1
1 2 3 1 2 3
2
ˆ
( , ) [e e e ] [e e e ] K( )
e x x
e
p
c e
e
e 2
dev
3
ˆ ˆ
( ) 2
c 1 1 1
T
ˆ [1, 1, 1]
1 1
dev 3
ˆ ˆ
( )
1 1 1 1
Good for large elastic strain](https://image.slidesharecdn.com/chap-4feaforelastoplasticproblems-230201060657-7c6360bb/85/Chap-4-FEA-for-Elastoplastic-Problems-pptx-137-320.jpg)

![139
Return Mapping in Principal Stress Space cont.
• Plastic evolution in principal stress space
– Fundamentally the same with classical plasticity: Classical
plasticity [s(6×1) and C(6×6)], but here [p(3×1) and ce(3×3)]
– During the plastic evolution, the principal direction remains
constant (fixed current configuration)
– Only principal stresses change
tr e tr
p
c e
p
tr e
p p
p
f̂( , )
g
q
c
p
n 1 n
f̂( , )
g
q
q
x x
p p
ˆ ˆ
0, f( , ) 0, f( , ) 0
g g
q q
](https://image.slidesharecdn.com/chap-4feaforelastoplasticproblems-230201060657-7c6360bb/85/Chap-4-FEA-for-Elastoplastic-Problems-pptx-139-320.jpg)

![142
Consistent Tangent Operator
• Relation b/w material and spatial tangent operators
– FirFjs: transform stress to material frame = FSFT
– FkmFln: differentiate w.r.t. E and then transform to spatial frame
• But,
• Let
• We want , but we have
S
D
E
T T
: : [ ( ) ] : : [ ( ) ] ( ) : : ( )
E D E F u F D F u F u c u
e e e e
rs
ijkl ir js km ln rsmn ir js km ln
mn
S
c F F F F D F F F F
E
ij
ijkl
kl
c
e
3
n 1 n 1 i
pi
i 1
m
c e
2
p alg e 2
dev
tr
4
4 A [ ]
g
c c N N 1 N N
e
T
w w
F F
E
e](https://image.slidesharecdn.com/chap-4feaforelastoplasticproblems-230201060657-7c6360bb/85/Chap-4-FEA-for-Elastoplastic-Problems-pptx-142-320.jpg)





The document is a chapter by Prof. Samirsinh Parmar on 1D elastoplasticity, covering key concepts such as the difference between elasticity and plasticity, hardening models, and mathematical formulations related to elastoplastic behavior. It also includes sections on practical applications, analysis procedures, and algorithms for isotropic hardening, alongside MATLAB code and exercises for further understanding. Additionally, it discusses finite element formulations used in elastoplastic analysis, providing a comprehensive guide for civil engineering applications.























































































