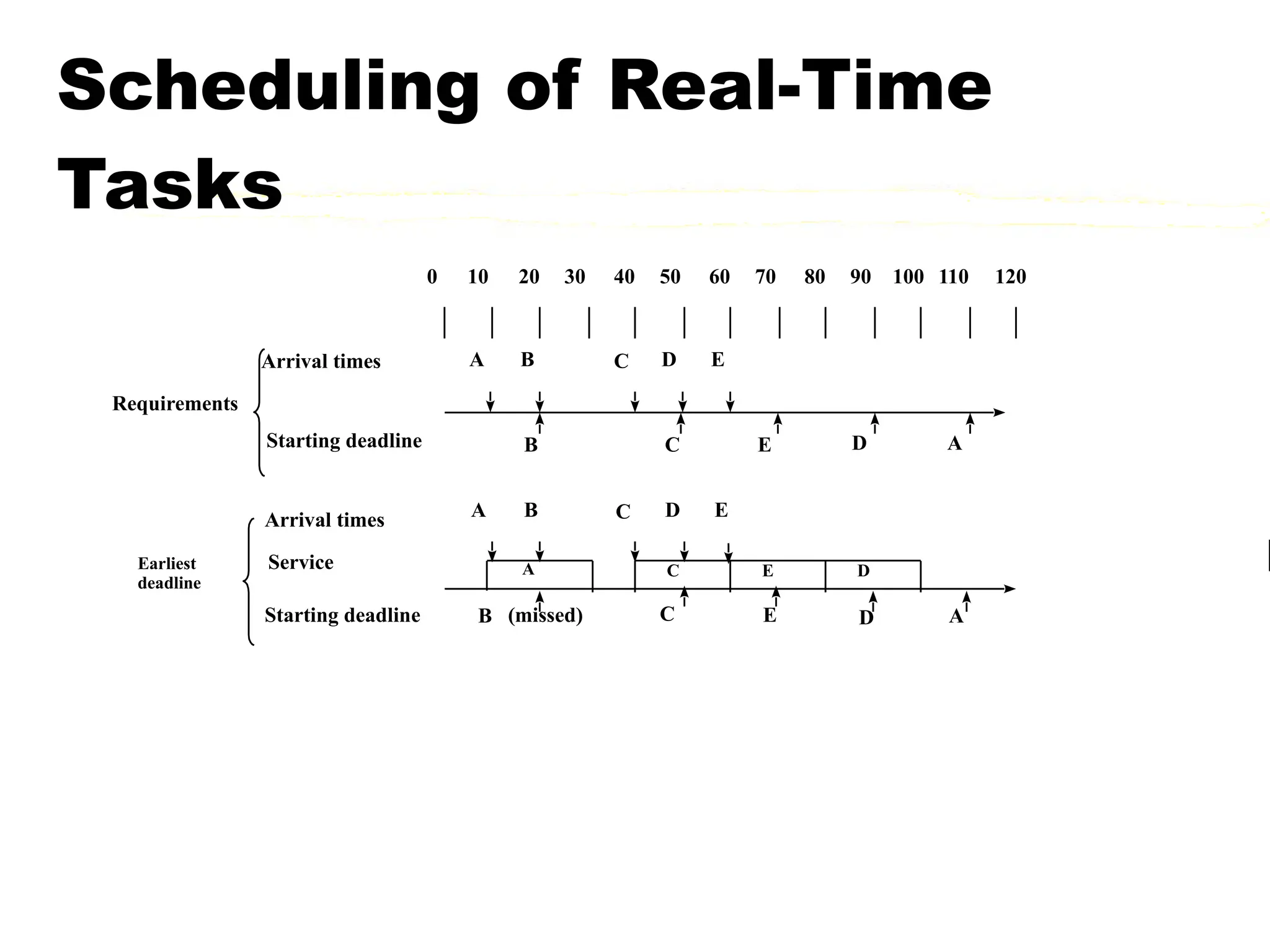
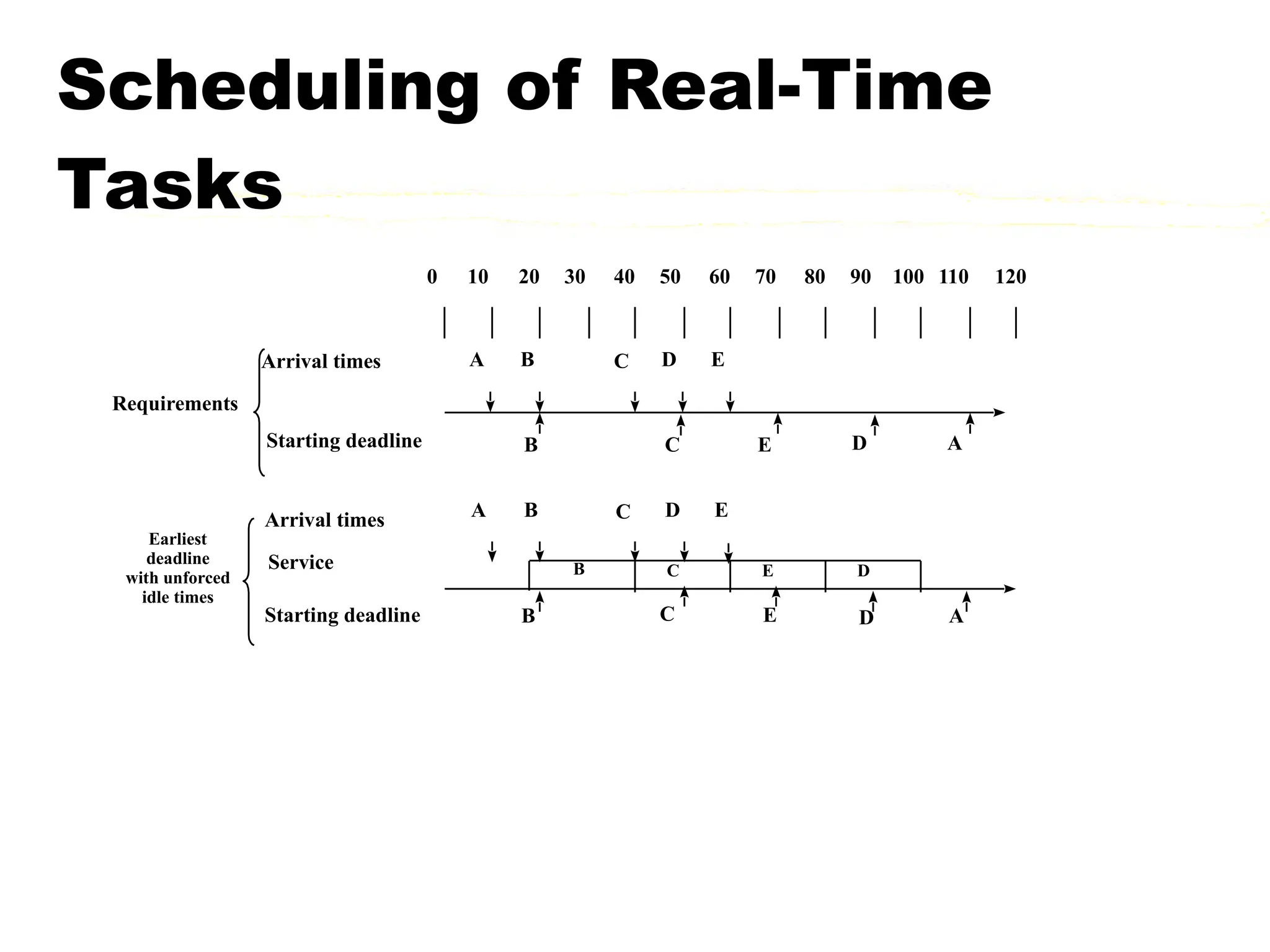
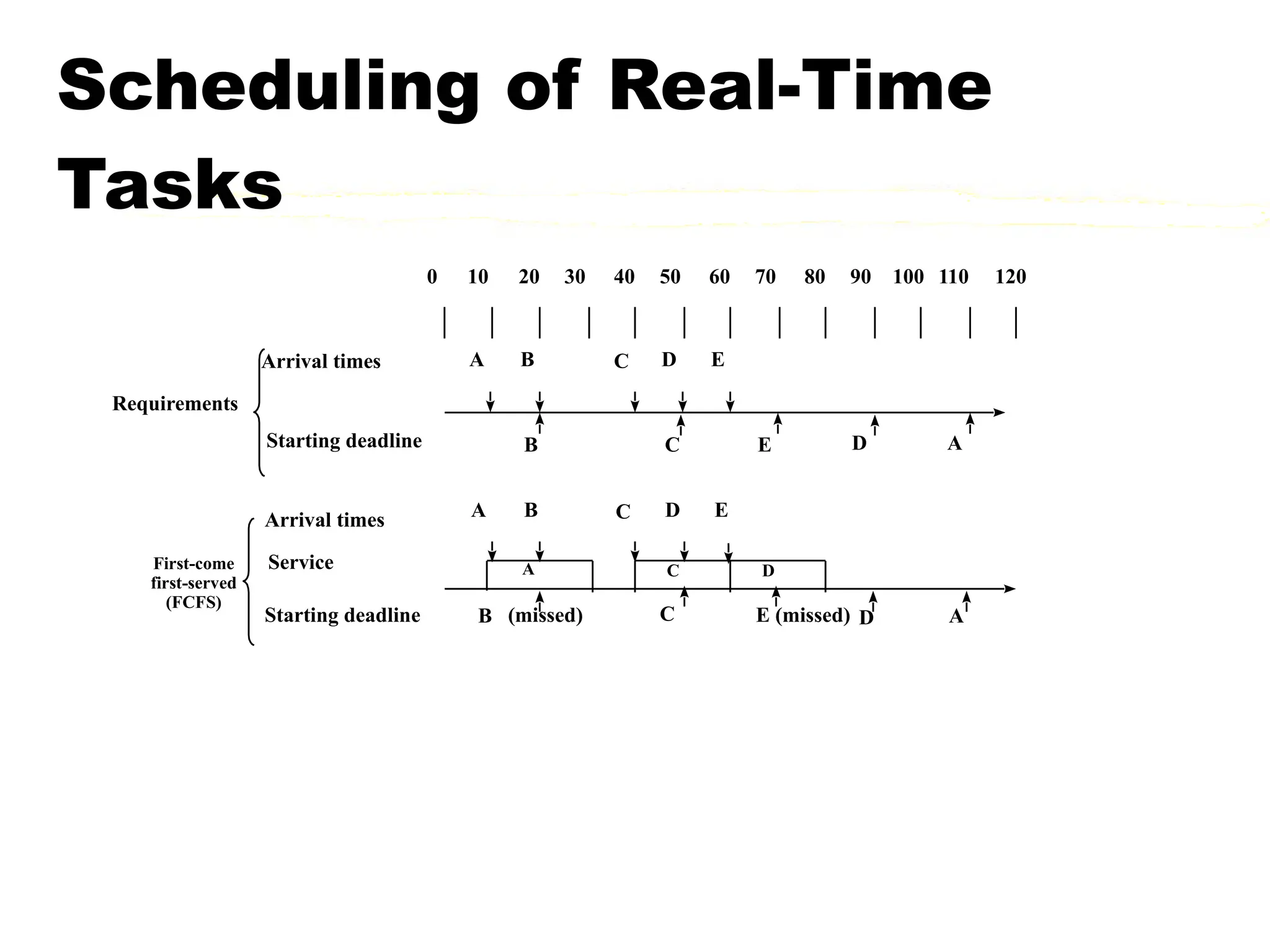
The document discusses classifications of multiprocessor systems and real-time scheduling, highlighting differences between loosely and tightly coupled processors, as well as various scheduling strategies—such as load sharing, gang scheduling, and dynamic scheduling. It also details characteristics and requirements of real-time operating systems, emphasizing the importance of timely task execution and responsiveness. Furthermore, it explains real-time scheduling techniques including static and dynamic prioritization, focusing on meeting deadlines rather than speed.