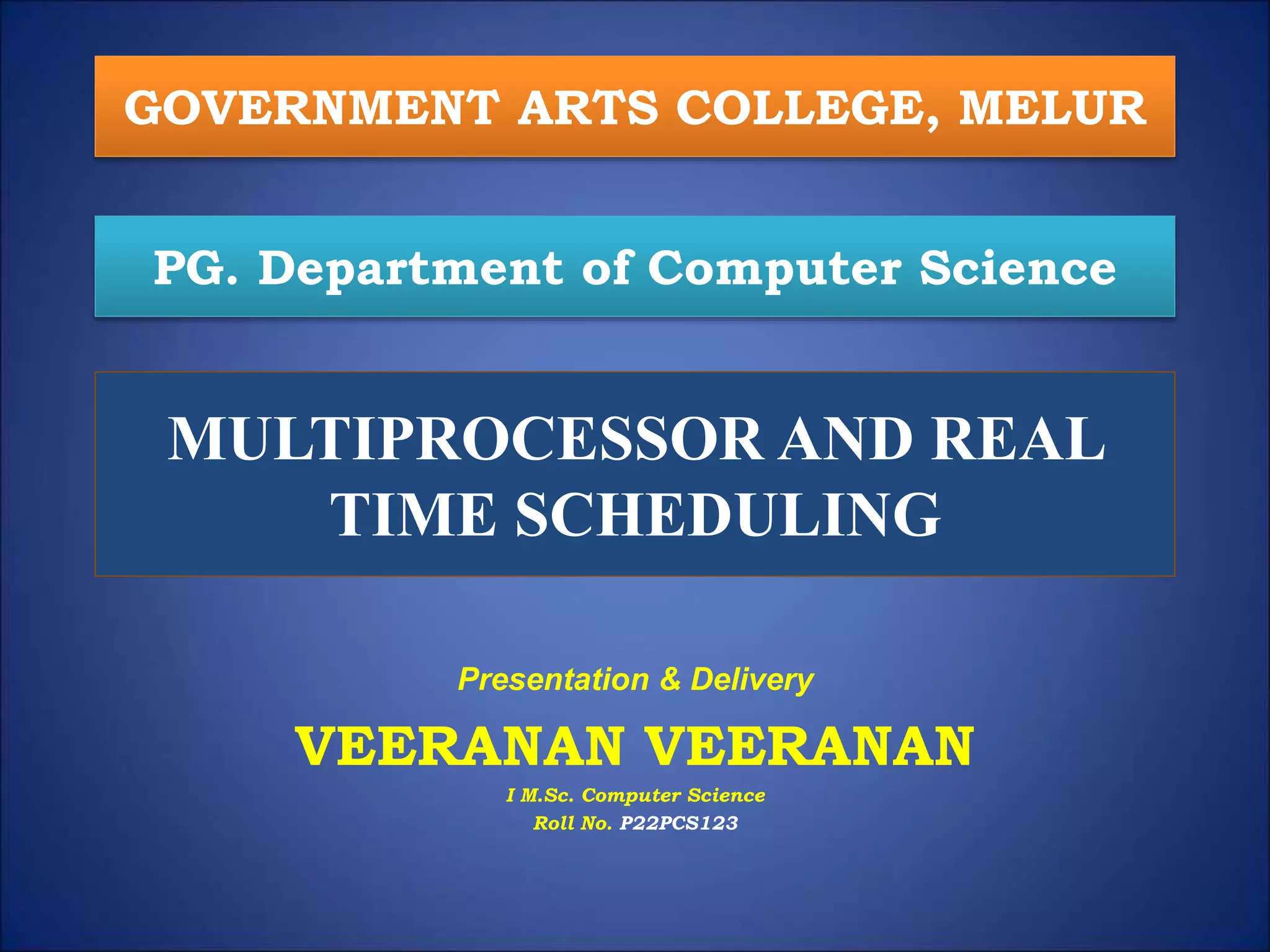
This document discusses multiprocessor and real-time scheduling. It covers multiprocessor design issues like process and thread scheduling. It also discusses characteristics of real-time operating systems like determinism and responsiveness. Real-time scheduling approaches covered include static table-driven, static priority-driven preemptive, dynamic planning based, and dynamic best-effort. The document provides examples of current real-time system applications and definitions of hard and soft real-time tasks.