Downloaded 39 times
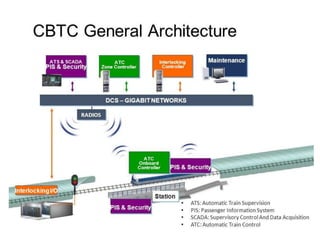

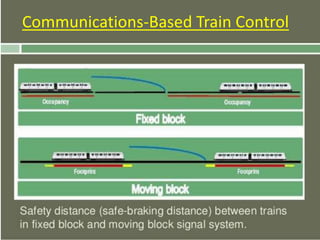



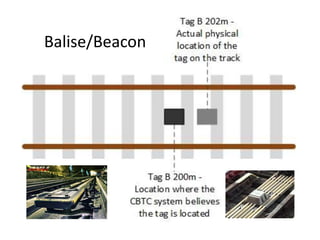

































The document discusses the transition from fixed-block to communications-based train control (CBTC) systems, focusing on architecture, safety measures, and automated braking. It covers technical aspects, such as the configuration layers and case studies related to safe distances and braking calculations. The content is designed for knowledge sharing among telecommunications professionals in the train control sector.































































