Download to read offline


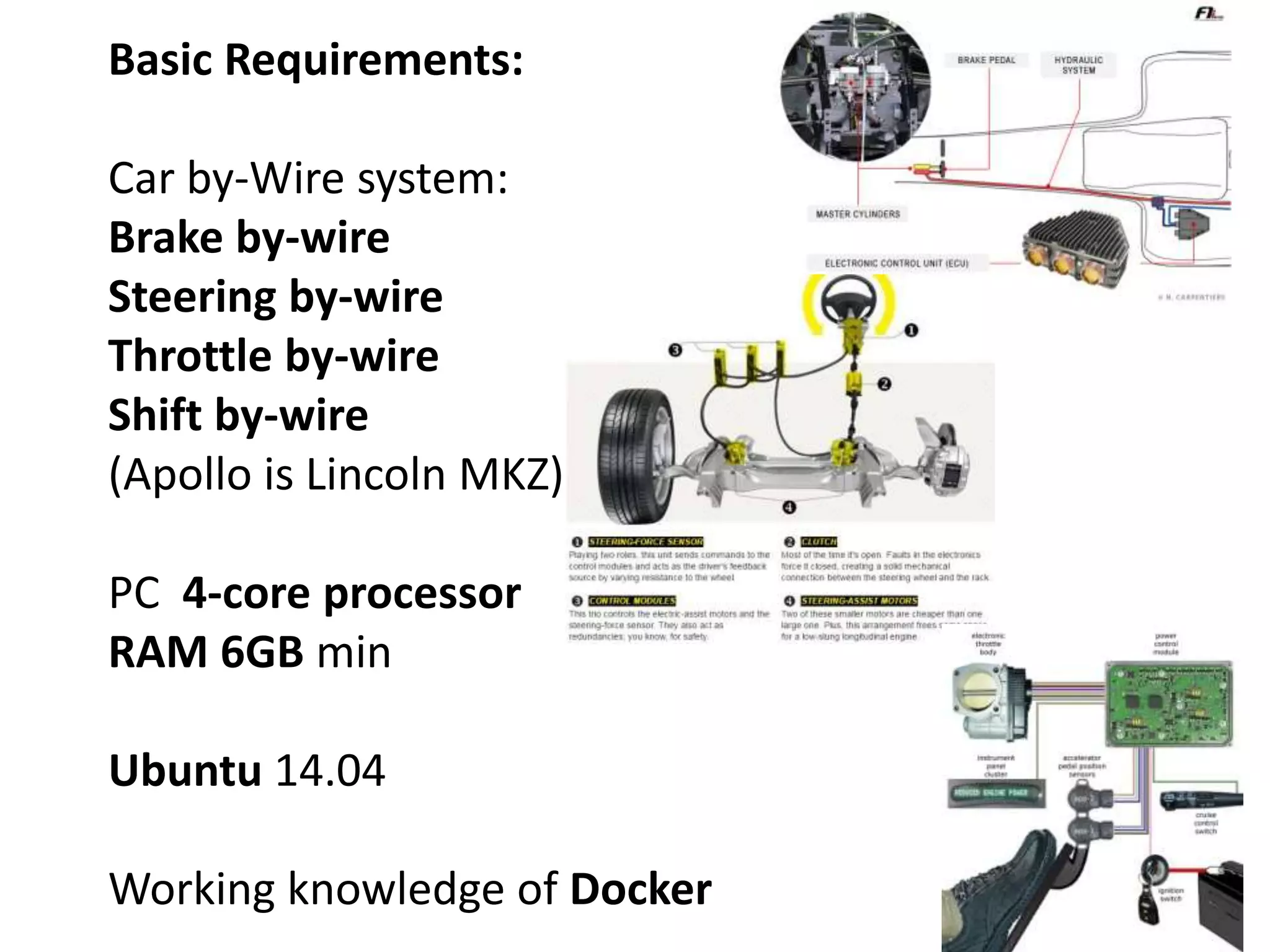

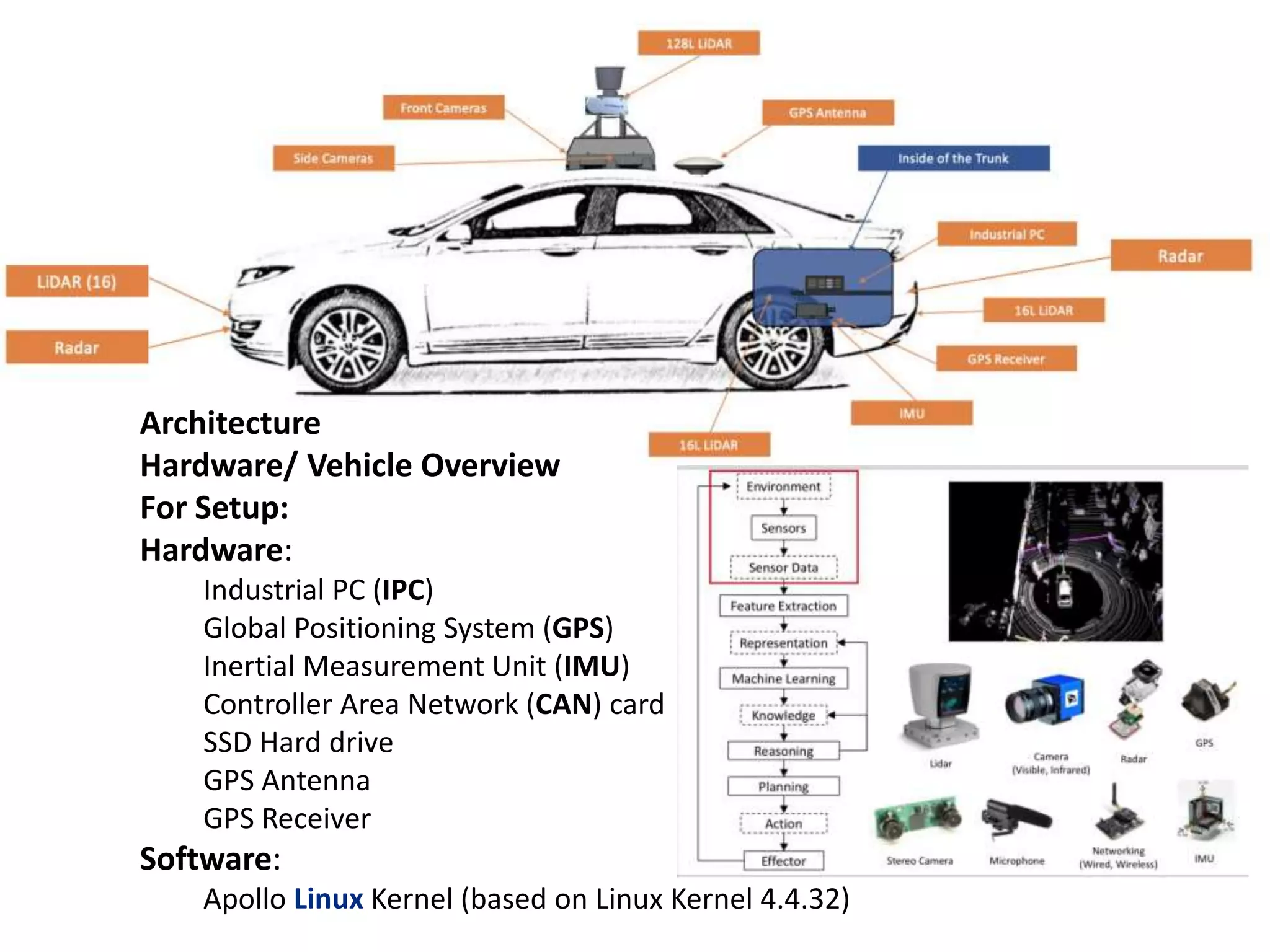


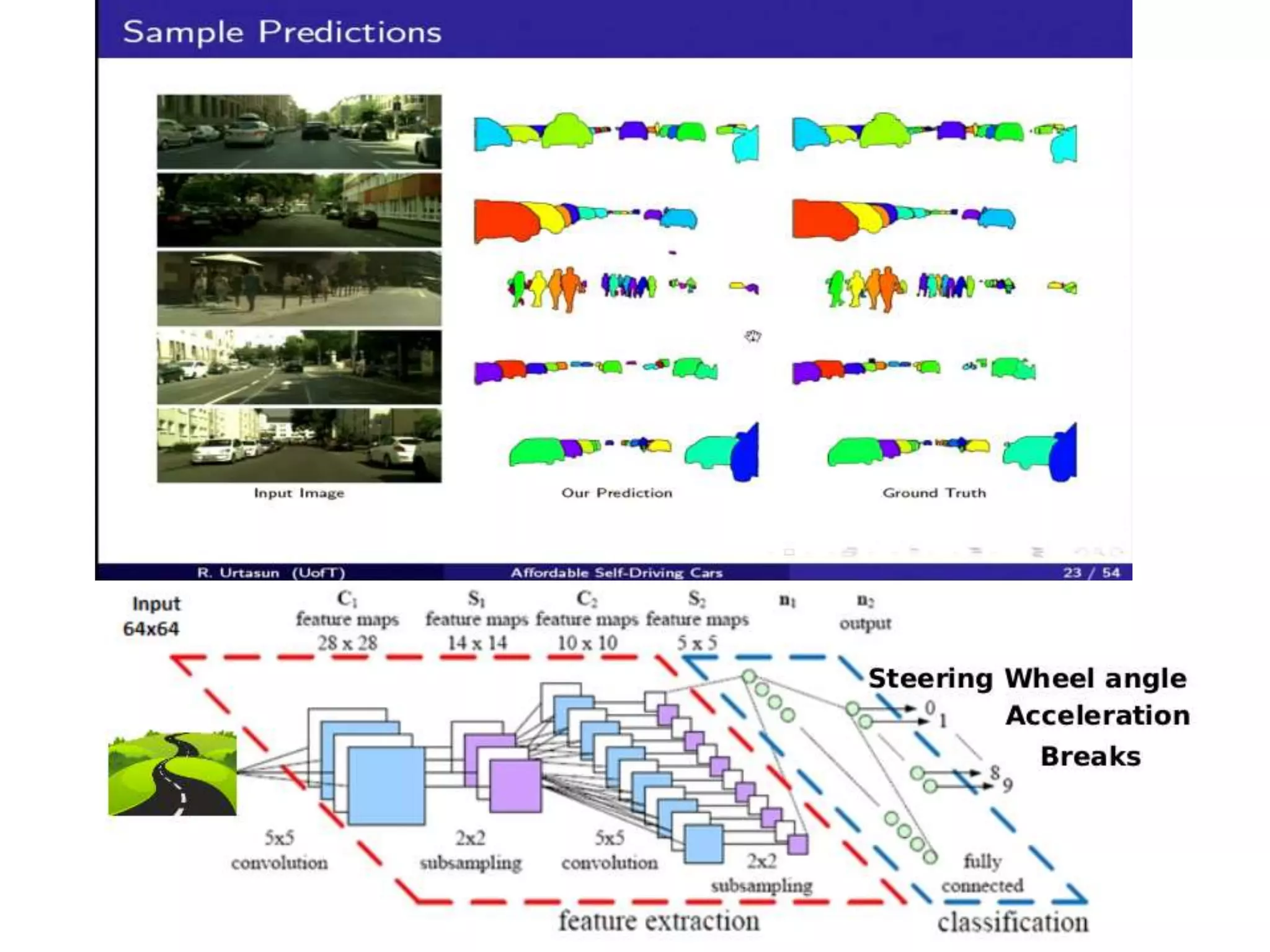
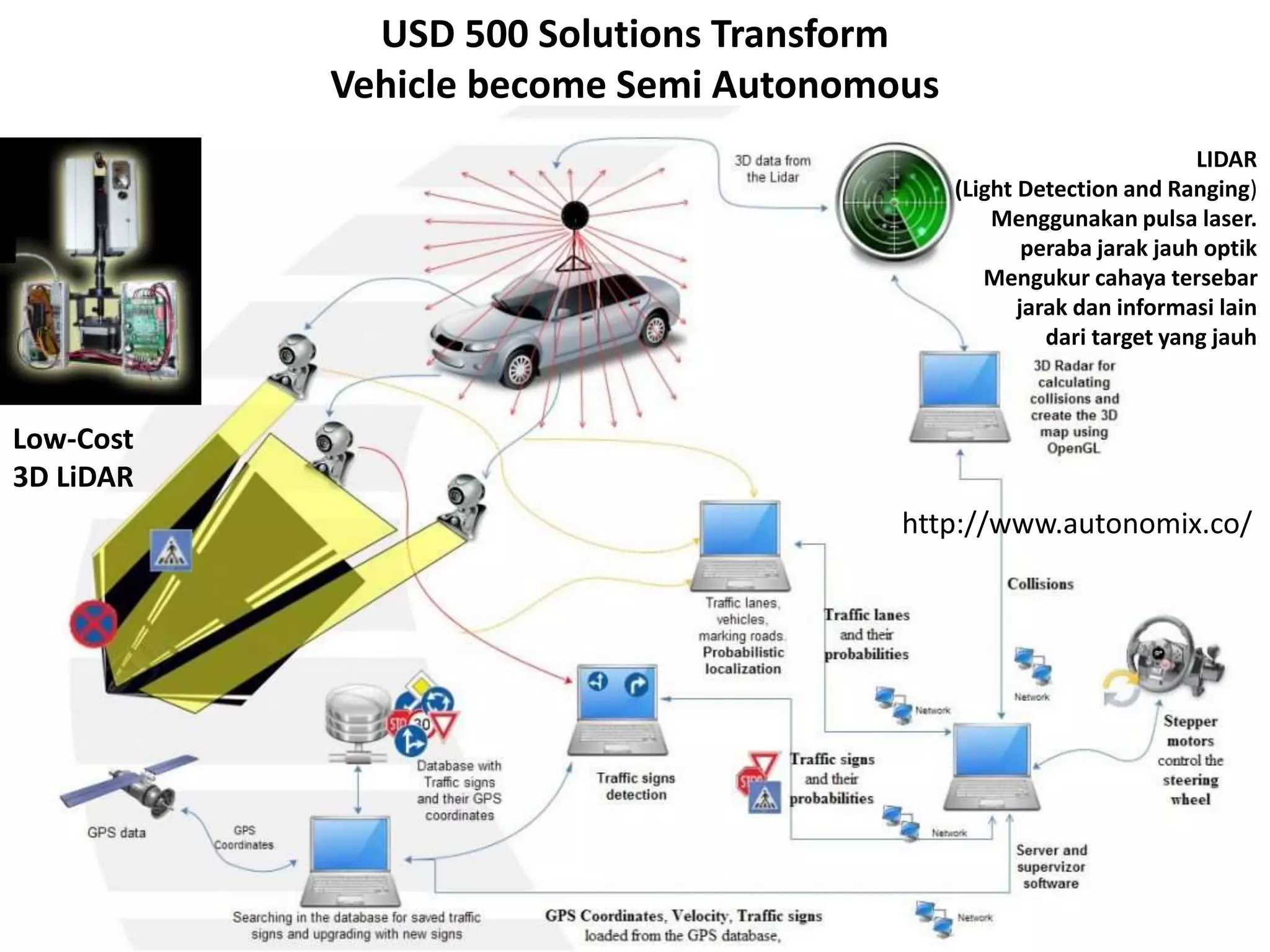
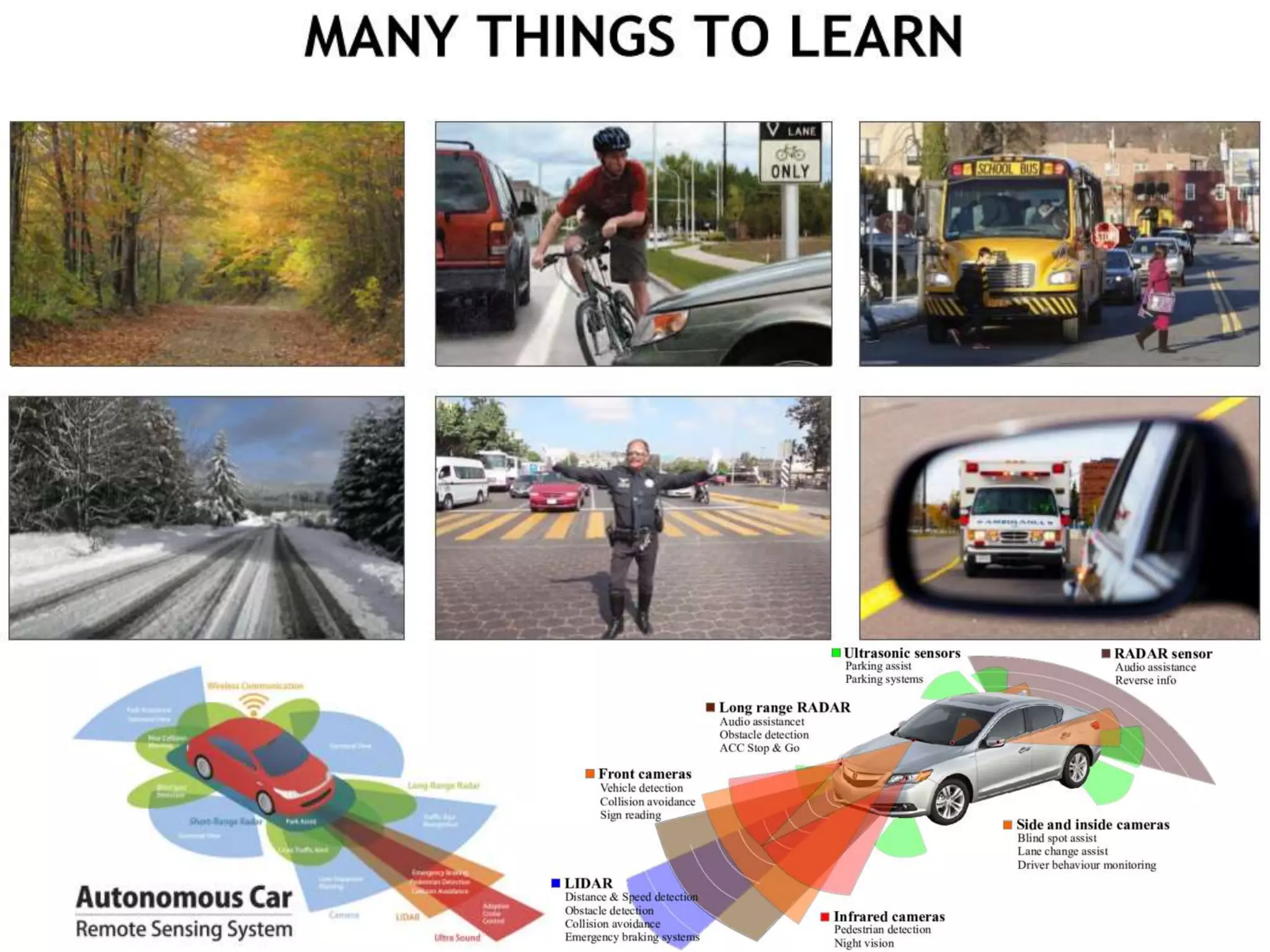
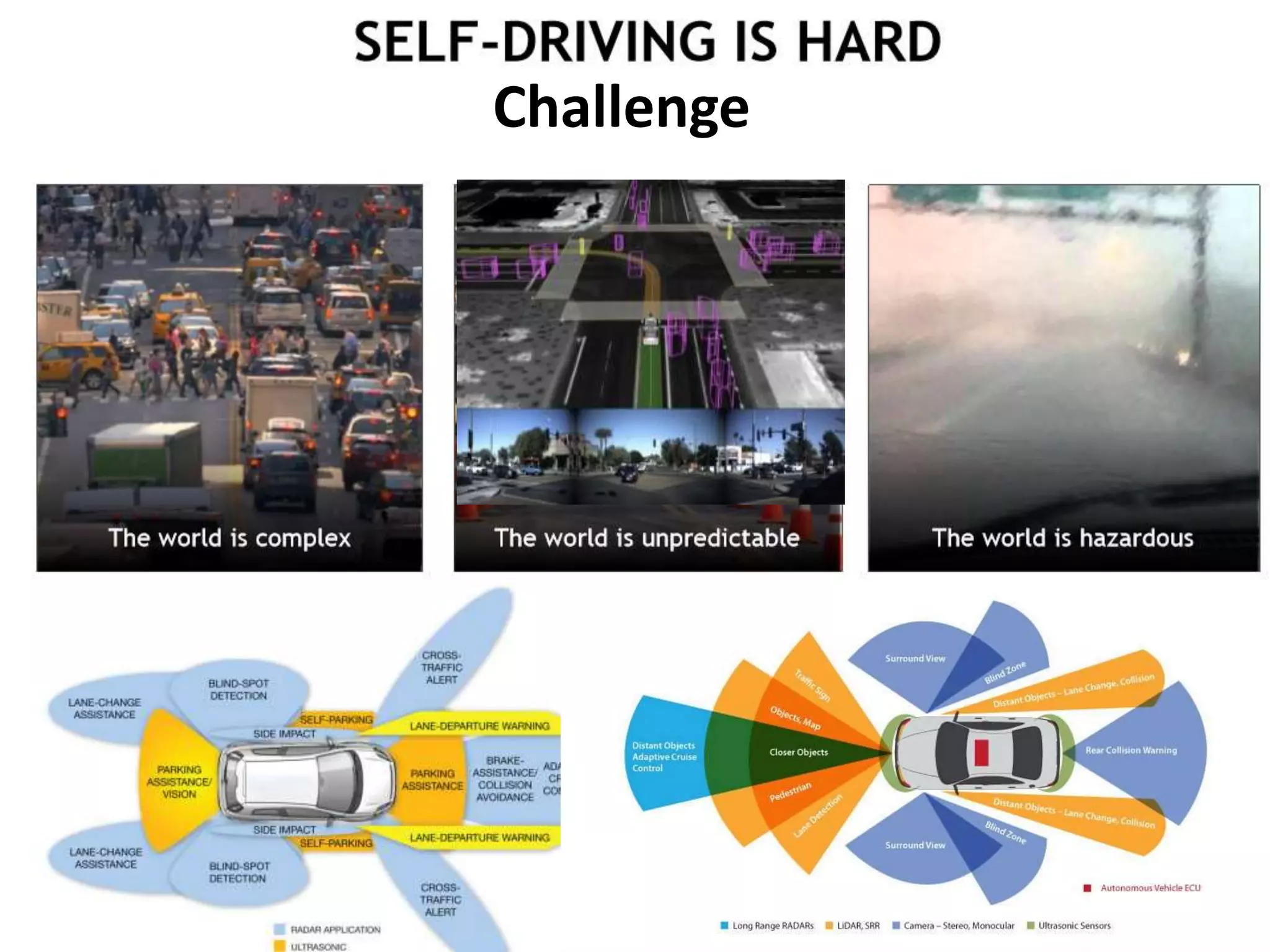
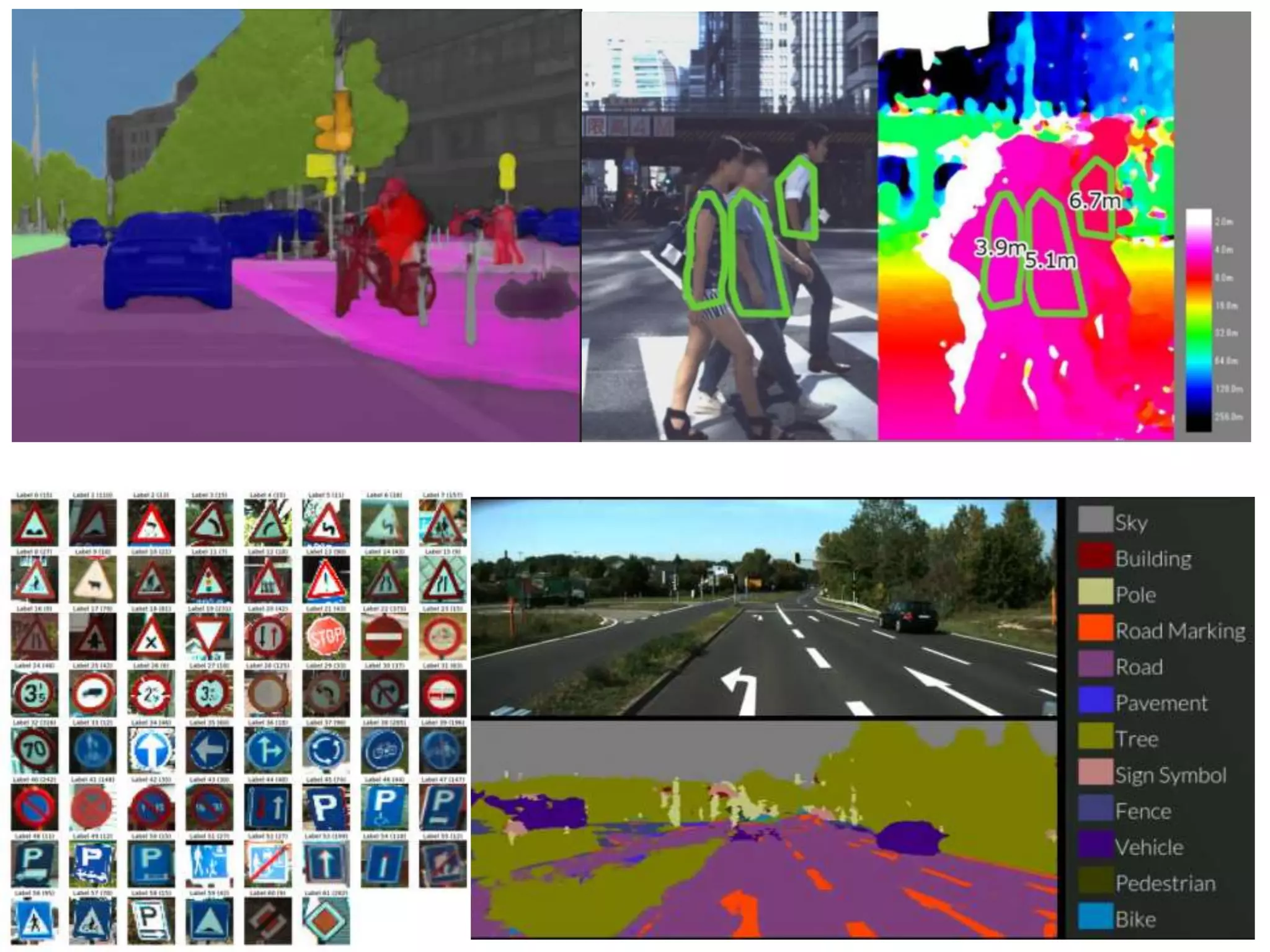
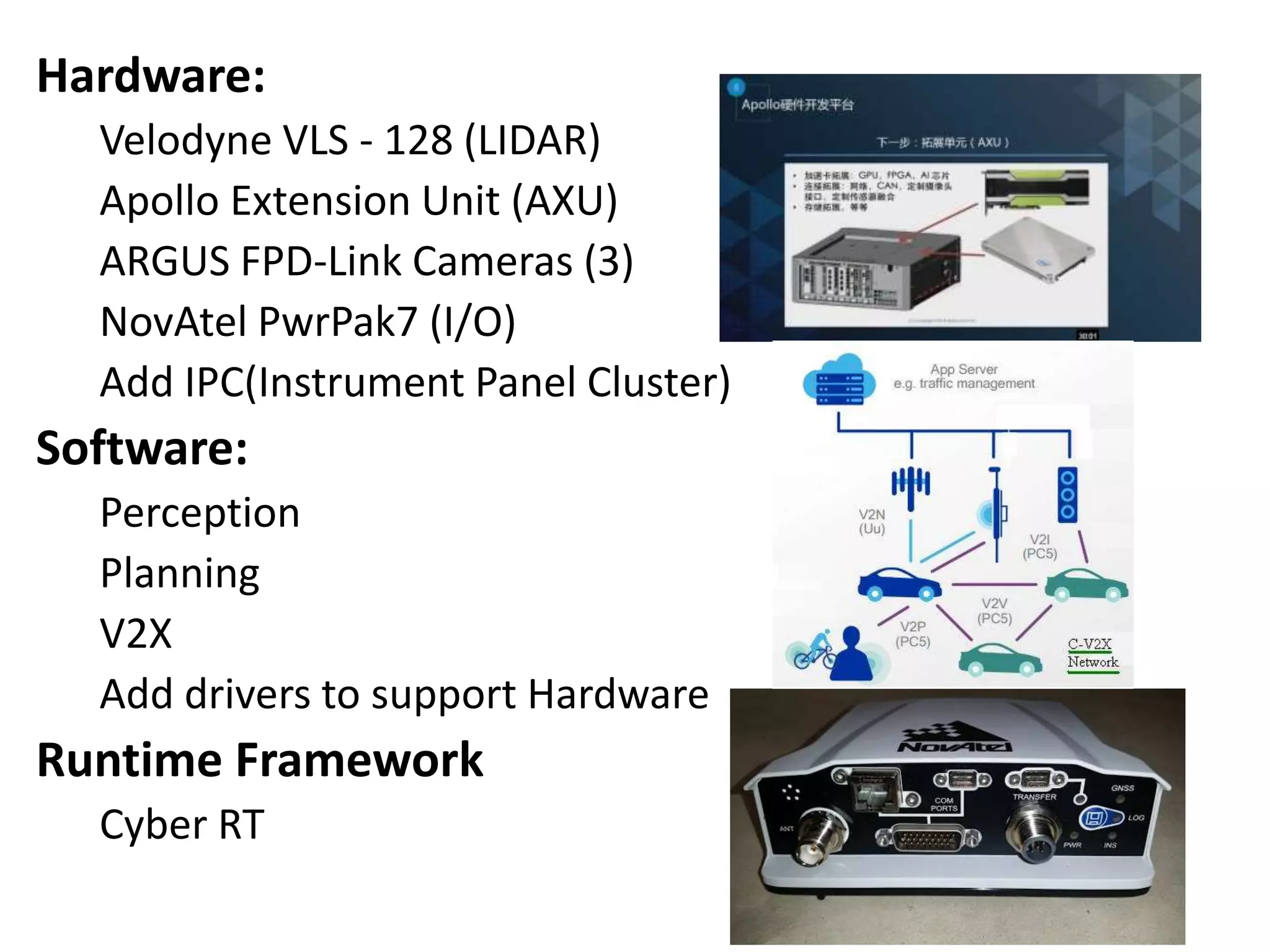
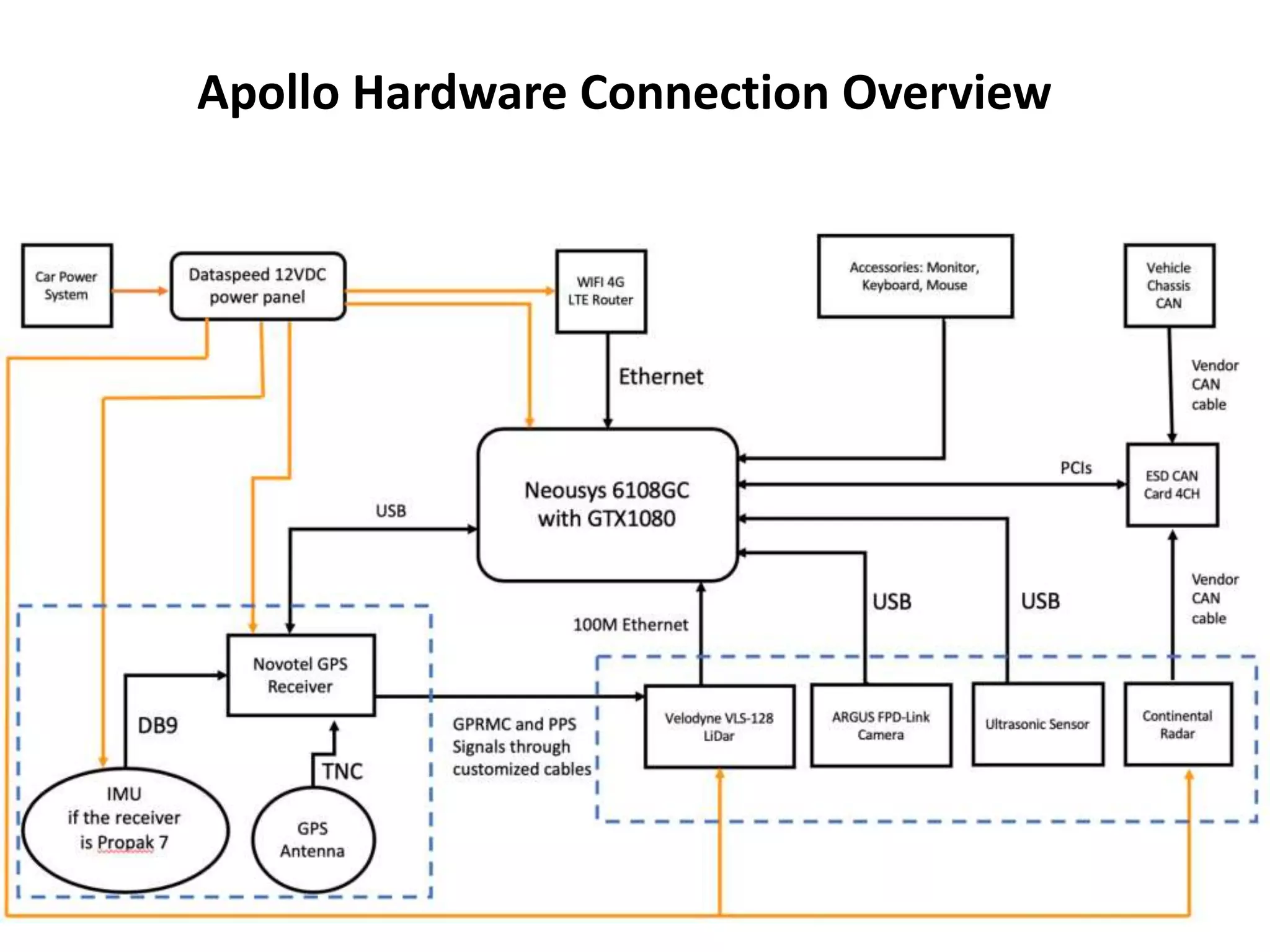
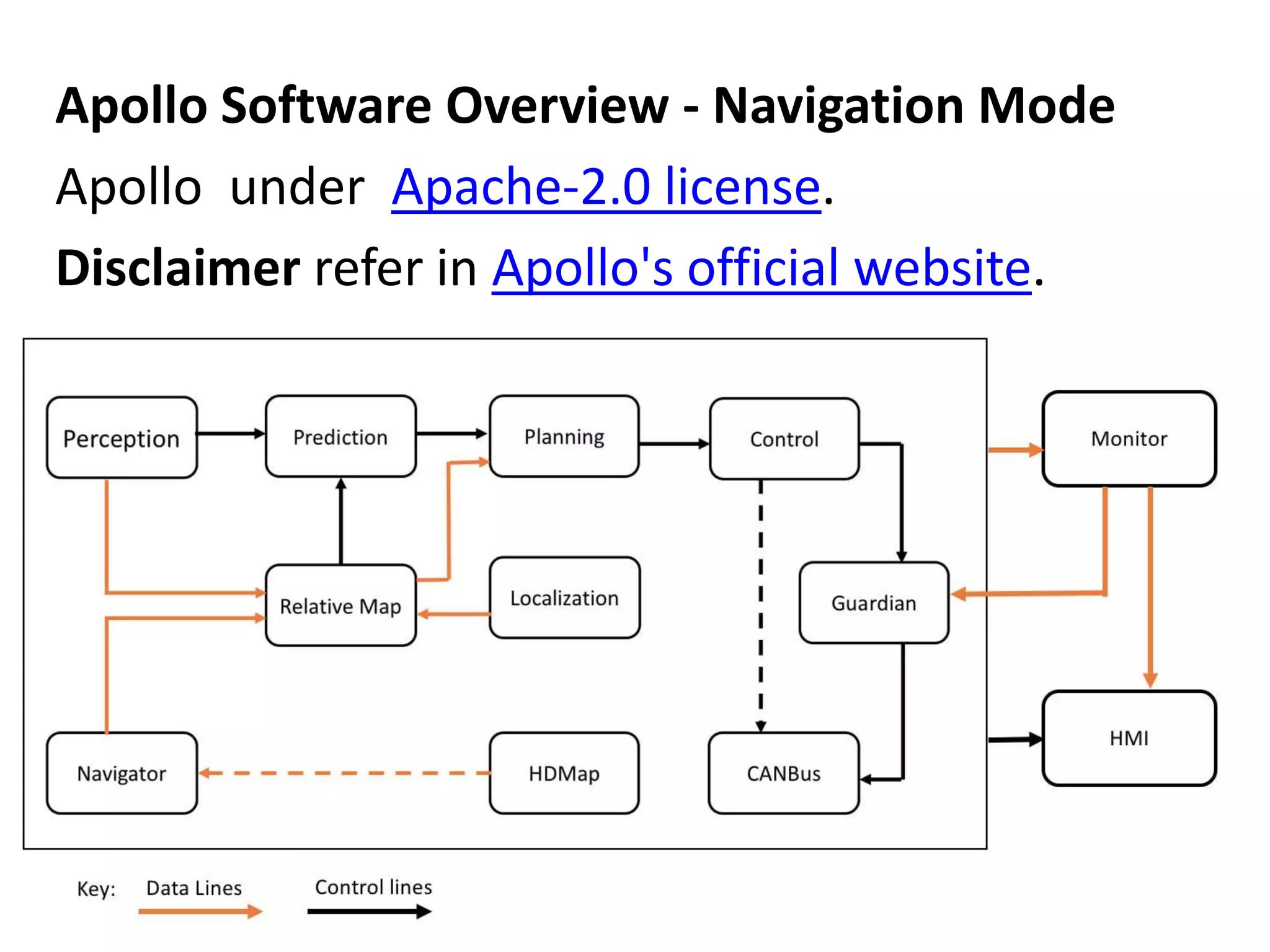
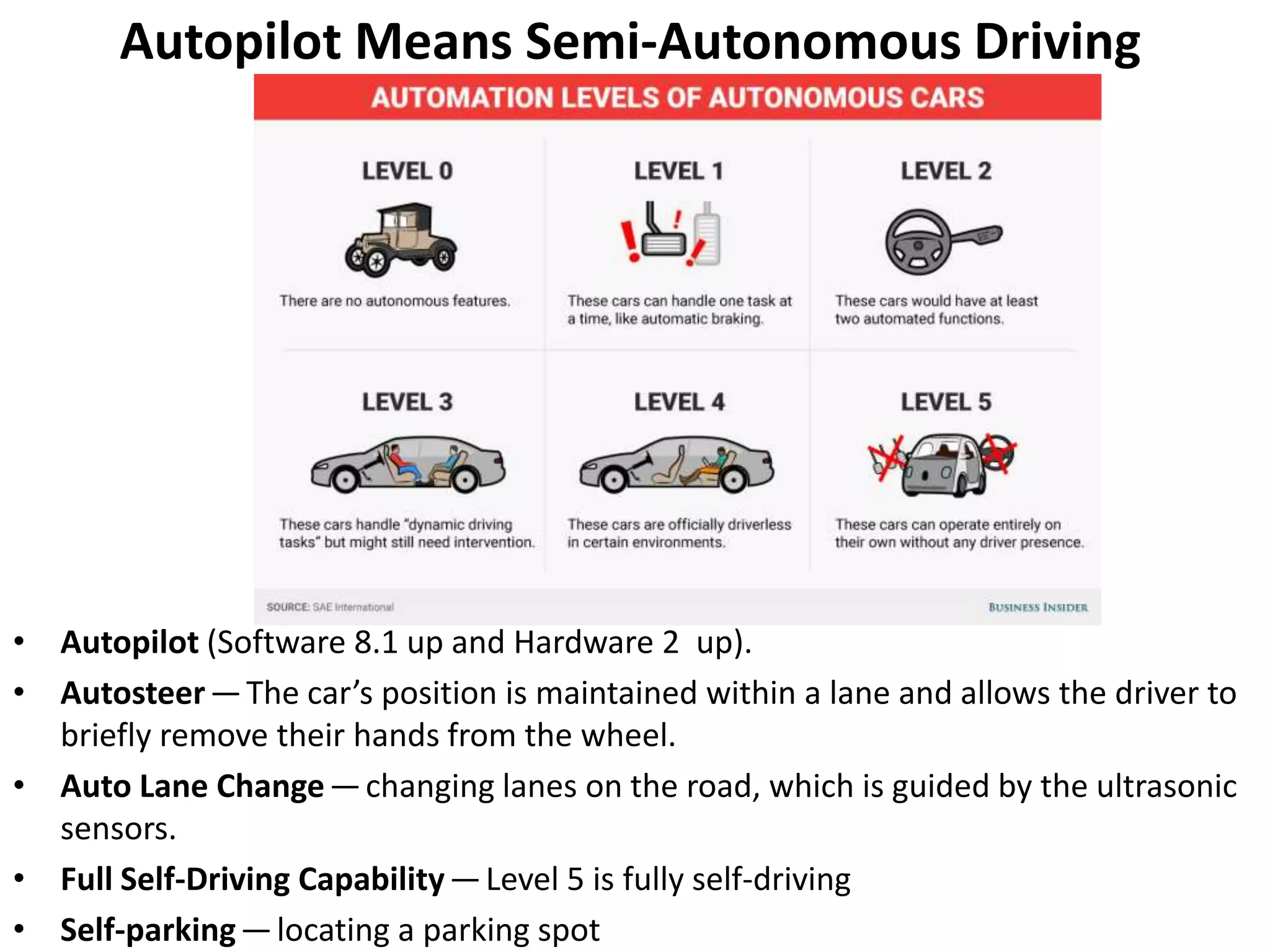






Dwika Sudrajat discussed autonomous driving car platforms and requirements. Basic requirements include brake-by-wire, steering-by-wire, and other systems. Hardware includes an industrial PC, sensors like LIDAR and cameras. Software includes the Apollo open source platform from Baidu with perception, planning, and other modules. Autonomous features continue to advance toward fully driverless capability.



































































