
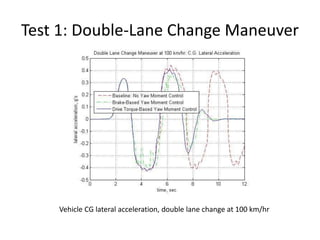
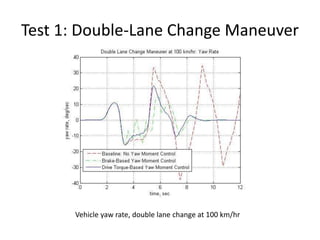
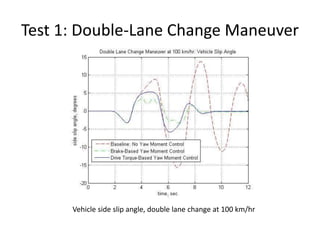
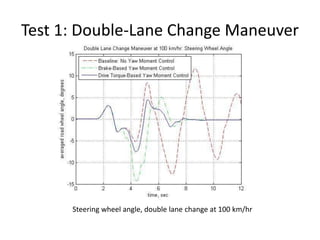
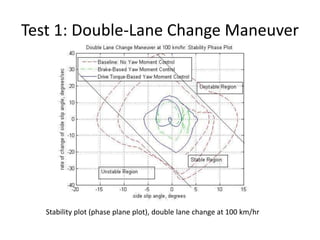
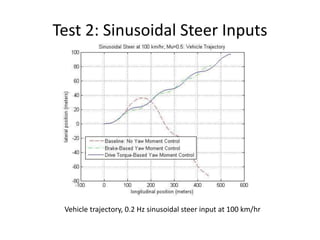
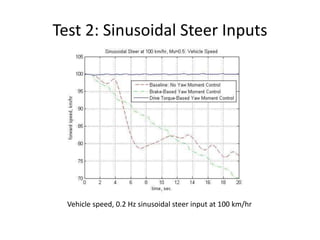
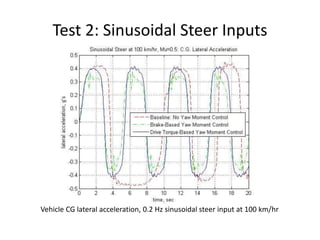
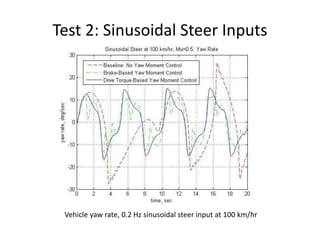
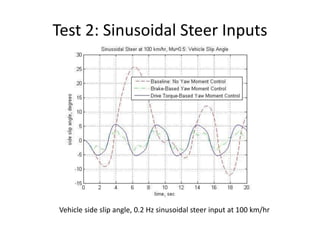
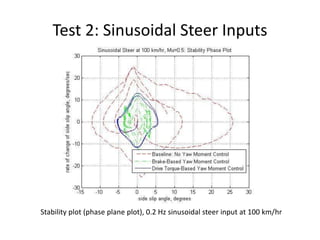

The document compares brake-based and drive torque-based electronic stability control (ESC) systems for 4x4 vehicles utilizing a TruckSim model. Both systems can maintain vehicle stability during high lateral acceleration on slippery roads, but the drive torque-based system is advantageous as it does not disrupt longitudinal dynamics. A combined approach of both systems can yield improved performance, balancing corrective measures based on the required yaw moment.



































































