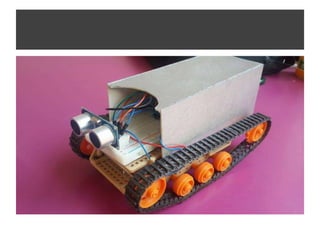
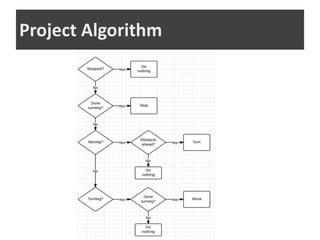
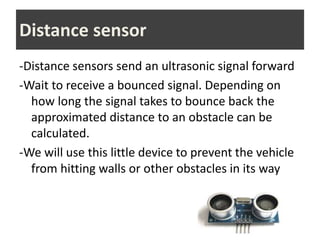
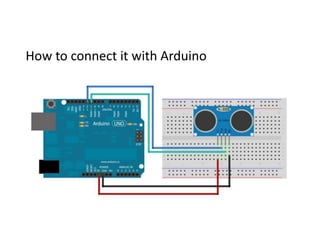
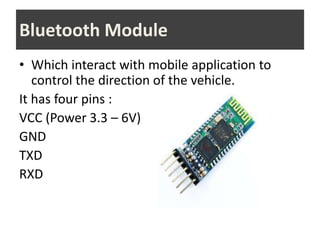
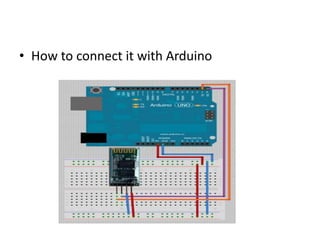
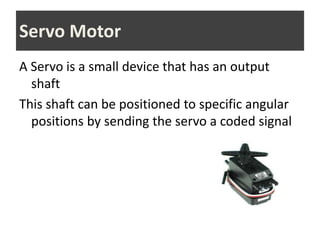
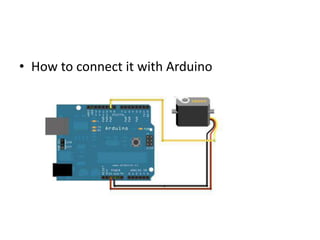
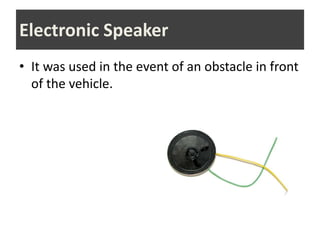
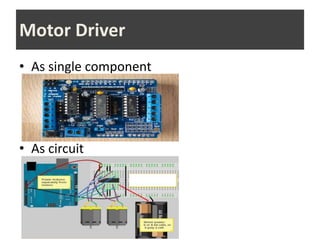
Students created a mobile controlled car that can be operated through a Bluetooth connection from an Android application. The car uses an Arduino board, motor driver, ultrasonic distance sensor, Bluetooth module, servo motor and other hardware components. The software on the Arduino allows it to communicate with the mobile application for remote control and uses the distance sensor to avoid obstacles. While the project goal of remote vehicle control was achieved, some components were damaged during testing and future work could explore additional applications like military robotics.