The document is a comprehensive introduction to integrating assembly language with C programming, explaining concepts such as inline assembly, extended assembly, and various assembly instructions and their syntaxes. It discusses how to specify operands, clobbered registers, and makes note of the importance of understanding the underlying architecture and assembler being used. Additionally, it includes example code to illustrate these principles in practice.





























![30 C in ASM
One more thing, in Windows OS and with NASM, a function is always prefixed with
a underscore, while in Linux OS, leading underscores from function name should be
removed.
2.1.1 Memory Reference
NASM was designed with simplicity of syntax in mind. One of the design goals of NASM
is that it should be possible, as far as is practical. NASM have a much simpler syntax
for memory references. The rule is simply that any access to the contents of a memory
location requires square brackets around the address, and any access to the address of a
variable doesnt. So an instruction of the form
✞
mov ax ,foo
✌
✆
always refer to a compiletime constant, whether its an EQU or the address of a variable.
To access the contents of the variable ‘foo’, you must code
✞
1 mov ax ,[ foo]
✌
✆
NASM does not support the hybrid syntaxes like
✞
1 mov ax ,foo[bx]
✌
✆
The correct syntax for the above is
✞
1 mov ax ,[ foo+bx]
✌
✆
2.1.2 Defining Constants
EQU defines a symbol to a given constant value. The action of EQU is to define the
given label name to the value of its (only) operand. This definition is absolute, and
cannot change later. See the example,
✞
1 myMsg db ’hello , world’
myMsgLen equ $ m y M s g
✌
✆
defines ‘myMsgLen’ to be the constant 12. ‘myMsgLen’ may not then be redefined later.
The value of ‘myMsgLen’ is evaluated once, using the value of ‘$’ at the point of definition,
rather than being evaluated wherever it is referenced and using the value of ‘$’ at the
point of reference.
2.1.3 Character Strings
A character string consists of up to eight characters enclosed in either single quotes (‘...’),
double quotes (“...”) or backquotes (‘...‘). Strings enclosed in backquotes support Cstyle
escapes for special characters, like single quote (), " double quote (”) etc. Unicode
characters specified with u or U are converted to UTF8.](https://image.slidesharecdn.com/basicasmincanintroduction-211010142004/85/Assembly-Codes-in-C-Programmes-A-Short-Notes-by-Arun-Umrao-30-320.jpg)

![32 C in ASM
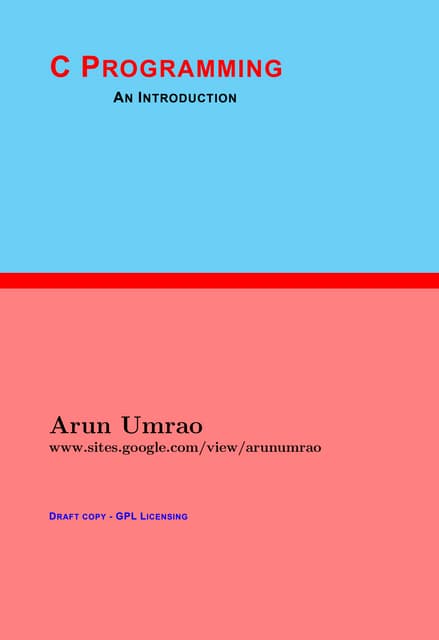
any), then there is need for reserve space for these local variables. We have to make space
for local variables by decrementing the stack pointer using sub instruction. Consider a C
function
✞
1 int myExp(int i, int j) {
int a, b, c; // Three local variables
3 b = 7; /* Local variable required *
*to store value for b */
5 return i * b + j;
}
✌
✆
The stock pointer of the function shall be looked like
esp
esp-4
esp-8
rAddr of myExp
Addr of i
Addr of j
High
to
Low
Here, ‘rAddr’ is abbreviation of ‘return address’. As the function has three local
variables ‘a’, ‘b’ and ‘c’ and their address are need to store in stock pointer so that we
can track and retrieve values of these local variables. For this we can either use to sub
keyword to make space for these three local variables. See the assembly translated to
above C function is given below:
✞
myExp:
2 sub esp , 12 ; makes room for 3 ints
mov dword [esp+4], 7 ; b = 7
4 mov eax , [esp +16] ; i
imul eax , [esp +4] ; i * b
6 add eax , [esp +20] ; i * b + j
ret
✌
✆
The stock pointer of the function shall be looked like
esp
esp-4
esp-8
esp-12
esp-16
esp-20
Addr of a
Addr of b
Addr of c
rAddr of myExp
Addr of i
Addr of j
High
to
Low](https://image.slidesharecdn.com/basicasmincanintroduction-211010142004/85/Assembly-Codes-in-C-Programmes-A-Short-Notes-by-Arun-Umrao-32-320.jpg)

![34 C in ASM
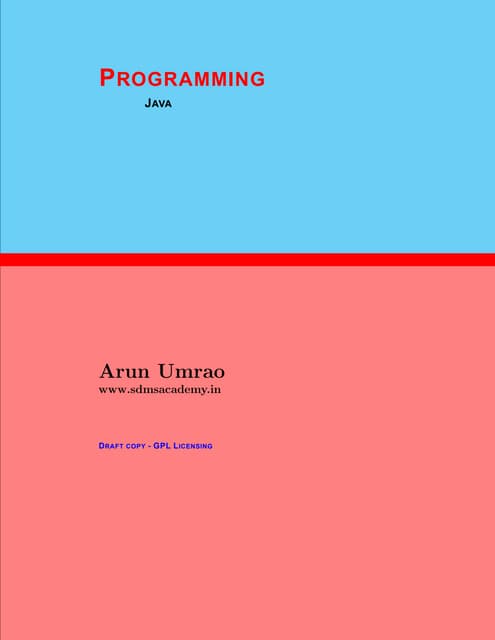
ebp+12
ebp+8
ebp+4
ebp
ebp-4
ebp-8
ebp-12
Addr of a
Addr of b
Addr of c
Addr of old EBP
rAddr of myFunc
Addr of i
Addr of j
High
to
Low
Memory
To be familiar with stack/base pointer, see the following C examples and the stack
pointers for C functions as given below:
✞
1 #include <stdio.h>
int ArrSum(unsigned len , int arr []);
3 int main (void ){
int nums [4], sum , n=4;
5 sum = ArrSum(n, nums );
return 0;
7 }
✌
✆
The stock/base pointer of the function ‘myArrSum’ shall be looked like
ebp
ebp-4
ebp-8
ebp-12
Addr of old EBP
rAddr of ArrSum
Addr of n
Addr of nums
esp
esp-4
esp-8
rAddr of ArrSum
Addr of n
Addr of nums
High
to
Low
When a program is called from commandline, then its stack/base pointer is looked
like as given below:
✞
1 #include <stdio.h>
int main (int argc , char ** argv ){
3 }
--> ./ myProg "a" 45
✌
✆
The stock/base pointer of the function ‘myArrSum’ shall be looked like
ebp
ebp-4
ebp-8
ebp-12
Addr of old EBP
rAddr of myProg
Addr of argc
Addr of argv
esp
esp-4
esp-8
rAddr of myProg
Addr of argc
Addr of argv
High
to
Low](https://image.slidesharecdn.com/basicasmincanintroduction-211010142004/85/Assembly-Codes-in-C-Programmes-A-Short-Notes-by-Arun-Umrao-34-320.jpg)

![36 C in ASM
✞
1 org 0x100
dd label
3 label:
<codes >
✌
✆
org 0x100 NASM’s org directive says origin. Its sole function is to specify one offset which
is added to all internal address references within the section.
2.1.8 NASM File Layout
The simplest structure of NASM file layout is appeared as
✞
<label >: <instruction operands > ; <comment >
✌
✆
These fields are optional. They may be present or not in a NASM assembly file. NASM
uses backslash () as the line continuation character. It does not place restrictions on
white space within a line. A label may have white space before them, or instructions may
have no space before them, or anything. The colon after a label is also optional. Valid
characters in labels are letters, numbers, ‘ ’, ‘$’, ‘#’, ‘@’, ‘˜
’, ‘.’, and ‘?’. Labels must
be started with letters, dots (.), ‘ ’ and ‘?’. If an identifier is prefixed with a ‘$’ then it
indicate that it is an identifier not a reserved word. Maximum length of an identifier is
4095 characters. We can also use the name of a segment register as an instruction prefix:
✞
1 es mov [bx],ax ; both are equal
mov [es:bx],ax ; both are equal & it is recommended
✌
✆
Unlike GAS assembler, register name e.g. eax, ebp, ebx, cr0 are not prefixed by a %
sign. The Unix object formats, and the bin object format, all support the standardized
section names .text, .data and .bss for the code, data and uninitializeddata sections. The
A NASM file is divided in following sections.
✞
org 100h
2 section .text
start:
4 ; put your code here
section .data
6 ; put data items here
section .bss
8 ; put uninitialized data here
✌
✆
This file is compiled with following NASM command.
✞
nasm <.asm file > f b i n o <out file name >
✌
✆
A simple helloworld.asm program for Window OS is given below:
✞
1 section .data
msg db ’Hello World!’, 0Ah ; End with line feed character
3
section .text](https://image.slidesharecdn.com/basicasmincanintroduction-211010142004/85/Assembly-Codes-in-C-Programmes-A-Short-Notes-by-Arun-Umrao-36-320.jpg)
![2.1. NASM 37
5 global _start ; Entry point in Windows OS
7 _start: ; Window OS convention
mov edx , 13 ; Number of bytes to write
9 mov ecx , msg ; Copy msg memory address into ecx
mov ebx , 1 ; Write to the STDOUT file
11 mov eax , 4 ; invoke SYS_WRITE (kernel opcode 4)
int 80h
13 mov ebx , 0 ; return 0 on exit - ’No Errors ’
mov eax , 1 ; invoke SYS_EXIT (kernel opcode 1)
15 int 80h
✌
✆
In Linux system, underscore before labels is removed. Compile this file in NASM with
Windows OS using following command and run to see desired result.
✞
1 nasm -f elf helloworld .asm
ld -m elf_i386 helloworld .o -o helloworld
3 ./ helloworld
✌
✆
The output is
✞
Hello World!
✌
✆
2.1.9 Calling External Functions
Sometime assembly language functions are linked with C to call C functions from assembly
codes. To do so, we should have familiar with gcc calling conventions. In assembly
language, parameters are pushed on the stack, right ot left and are removed by the caller
after the call. After the parameters are pushed, the call instruction is made, so when
the called function gets control, the return address is at [esp], the first parameter is at
[esp+4], etc. It is the caller’s responsibility to remove the parameters from the stack after
a function call in stdcall or cdecl calling conventions.
rAdd of old esp (0xff00ff00) Addr of para (0xffeeff00) rAdd of printf (0xfbabff00)
esp
esp+4
Stack
High Memory Low Memory
Values of registers ebx, esi, edi, ebp, ds, es, ss, must be saved before the calling of the
function. A function that returns an integer value should return it in eax and a floating
point value should be returned on the fpu stack top. push instruction adds the value in
stack from high memory to low memory, i.e. in reverse memory order. See the following
codes.
✞
1 global main
extern printf
3 section .text](https://image.slidesharecdn.com/basicasmincanintroduction-211010142004/85/Assembly-Codes-in-C-Programmes-A-Short-Notes-by-Arun-Umrao-37-320.jpg)
![38 C in ASM
main :
5 push msg
call printf ; Calling C printf function
7 add esp , 4 ; Set the location of esp to its
; old location
9 ret
msg:
11 db ’Hello , World’, 10, 0
✌
✆
When the program being executed and on execution of each opcode, stack pointer is
incrases by one. Assume, when subroutine main was being executed, esp pointed to
memory containing the return address from subroutine. Let it is current location of esp
and it is shown in the following figure.
rAdd of old esp (0xff00ff00)
esp
Stack
High Memory Low Memory
At the execution of instruction
✞
1 push msg
✌
✆
message is stored in the memory and address of first character of the message string is
stored in the stack. Now, esp pointed to the current location of stack, which is at next
four bytes (i.e. [esp+4]) for 32 bits system. In 32 bits system, 4 bytes are sufficient to
address all possible memory locations.
rAdd of old esp (0xff00ff00) Add of msg (0xffeeff00)
esp
Stack
High Memory Low Memory
On execution of
✞
1 call printf
✌
✆
return address of printf is stored in the stack and esp pointed to this current stack
location.
rAdd of old esp (0xff00ff00) Add of msg (0xffeeff00) rAdd of printf (0xffeeffdd)
esp
Stack
High Memory Low Memory](https://image.slidesharecdn.com/basicasmincanintroduction-211010142004/85/Assembly-Codes-in-C-Programmes-A-Short-Notes-by-Arun-Umrao-38-320.jpg)




![2.1. NASM 43
ret
13 msg:
db ’Hello , World’, 10, 0
✌
✆
Multi-line NASM macros are declared as given below:
✞
%macro <macro name > <n>
2 <codes >
%endmacro
✌
✆
Here, ‘n’ is number of possible arguments those shall be passed to this macro. Macroname
may or may not be reserved keywords. Arguments may be zero or more than one. In
case of more than one parameters, each sequential parameters are passed to placeholder
by %1, %2 etc. Multi-line macros, like single-line macros, are case-sensitive, unless you
define them using the alternative directive %imacro. Macro names may or may not a
machine instruction. In case of macro name is machine instruction, then it will overload
to the previously defined macro.
✞
1 extern printf
%macro myMacro 1 ; user ’s print macro
3 section .data
mystr db %1,0 ; %1 is first parameter in macro call
5 section .text
; pushed onto stack backwards
7 push dword [c] ; int c
push dword [b] ; int b
9 push dword [a] ; int a
push dword mystr ; users string
11 push dword fmt ; address of format string
call printf ; Call C function
13 add esp ,20 ; Set esp at its old location
; and remove elements at low
15 ; memory side
%endmacro
17
section .data ; preset constants , writeable
19 fmt: db "%s, a=%d, b=%d, c=%d" ,10,0
a: dd 5
21 b: dd 6
c: dd 0
23
section .text ; instructions , code segment
25 global main ; gcc standard linking label
main : ; gcc entry point -> "main "
27 mov eax ,[a] ; load a
add eax ,[b] ; add b
29 mov [c],eax ; copy a+b into c
myMacro "c=a+b" ; call user ’s printing macro
31
mov eax ,0 ; exit code , 0= normal
33 ret ; main return to operating system
✌
✆](https://image.slidesharecdn.com/basicasmincanintroduction-211010142004/85/Assembly-Codes-in-C-Programmes-A-Short-Notes-by-Arun-Umrao-43-320.jpg)



![2.2. LINK ASM WITH C 47
7 myFirstASM :
mov eax , 4 ; Leave space on stack for
9 ; local variable "myFirstASM "
mov ebx , 1
11 mov ecx , hello
mov edx , 13
13 int 80h
ret
✌
✆
Compile above program for 32 bit executable and linkable format (elf32) by using following
command.
✞
nasm -f elf32 myFirstAsm.asm -o myFirstAsm.o
✌
✆
Write a C program using extern keyword to access the ‘myFirstASM’ function as compiled
above.
✞
1 #include <stdio.h>
3 int main (int argc , char *argv []) {
extern myFirstASM ();
5 myFirstASM ();
}
✌
✆
Now compile it with gcc using following command.
✞
gcc myFirstAsm .c myFirstAsm .o -o hello
2 ./ hello
✌
✆
you will get the desired output. ASM functions can be called with input values from C
programms too. See the following codes. The codes of add.asm file is given below:
✞
section .text
2 global myAsmAdd
myAsmAdd :
4 push ebp ; Save the prior Base Pointer value
mov ebp , esp ; Copy Stock Pointer into Base
6 ; Pointer [ebp +0] Space for old
; ebp value [ebp +4] Space for
8 ; return address
mov eax , [ebp +8] ; Base Index Addressing.
10 ; Get First Input Value
add eax , [ebp +12] ; Get Second input Value
12 pop ebp ; Return Output
ret
✌
✆
The codes of addc.c file is given below:
✞
1 #include <stdio.h>
/* Function , written in Assembly Language . */](https://image.slidesharecdn.com/basicasmincanintroduction-211010142004/85/Assembly-Codes-in-C-Programmes-A-Short-Notes-by-Arun-Umrao-47-320.jpg)































![[ASM]Lab4](https://cdn.slidesharecdn.com/ss_thumbnails/asmlab4-151121101809-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)














































