Downloaded 51 times
![Matteo Bordin [email_address] Porting GNAT to Lego Mindstorm NXT: an Education-oriented Platform for High-Integrity Systems Piotr Piwko [email_address]](https://image.slidesharecdn.com/gnatgplformindstorms-090619085307-phpapp01/85/GNAT-GPL-For-Mindstorms-1-320.jpg)









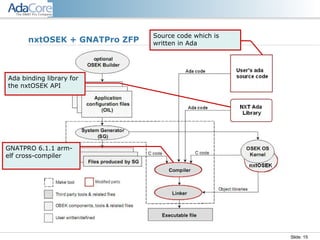
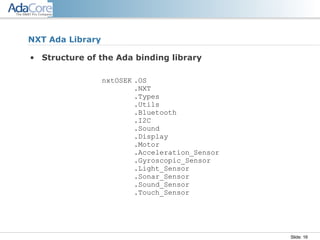
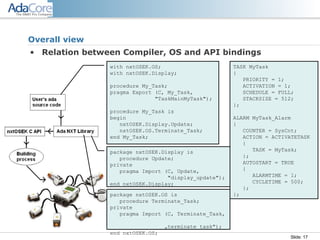


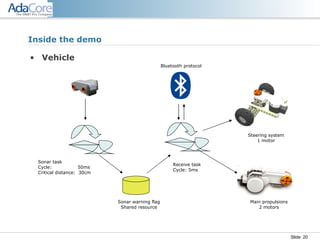
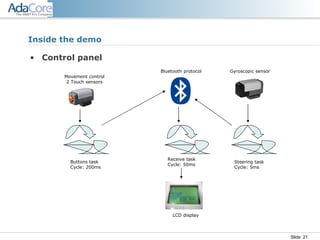


The project focuses on porting the GNATpro ZFP technology to the ARM 7 architecture by developing an Ada binding for the NXT OSEK API, aimed at creating an educational platform for high-integrity systems using LEGO Mindstorms NXT. Additionally, the demonstration includes a remote-controlled vehicle with features such as ultrasonic detection and Bluetooth communication, showcasing the integration of real-time operating systems with educational tools. Future improvements aim to enhance the Ada library and support more robust tasking and automation features.