This document describes an active vibration control system developed by TrelleborgVibracoustic to reduce unwanted vibrations in electric vehicles with range extender engines. The system uses an electrodynamic actuator and electronic control unit to detect vibrations from the combustion engine and generate counter-vibrations to cancel them out, improving interior noise and vibration levels. Testing of a prototype system on a vehicle found it effectively reduced booming noises from the unbalanced four-cylinder range extender engine, particularly its dominant second-order vibrations transmitted through the right-hand side engine mount. The active approach provides a lighter and more flexible solution than conventional passive vibration damping methods.



![accelerometer which usually covers a
range of up to 1.2 g can basically be
installed anywhere in the car. The sen-
sor and the ECU can also be installed
inside the actuator, thereby reducing
costs and avoiding the complexity of an
additional component.
SYSTEM OPTIONS
The system is configured individually
based on customer requirements and
specific NVH issues to be resolved.
Closed loop systems use a continuous
feedback loop employing an accelerome-
ter or microphone as the error sensor.
The engine’s unbalanced 2nd order shak-
ing forces are the target in this project.
These excitations are purely mass and
inertia generated, i.e. they depend on the
engine speed but not on the engine load.
In such a case a closed-loop feed-back is
not necessary and an open loop system
may suffice.
In this much simpler and cost-efficient
approach, the determination of the drive
signal to the actuator is performed sim-
ply by cross checking a lookup table
which has listed the output amplitude
and phase shift required by the actuator
at any given point in the engine rpm
range. In theory this lookup table can
indeed be quite complex and include
other determining factors available on
the vehicle CAN (controller area net-
work) bus, such as ambient temperature,
vehicle loads, battery voltage and so on.
It should be noted that an error sensor
(accelerometer or microphone) is still
needed at the position of issue to train
the system and populate the lookup
table, just not to operate the system once
it is initiated.
IMPLEMENTATION INTO PRACTICE
In a first set of investigations an acceler-
ometer was placed right next to the
shaker, on the rail close to the RHS power-
train mount. The vertical vibrations at
that point were taken as the input signal
for the electronic controller. With this
setup a broadband reduction of the local
vibrations was achieved. However, this
improvement did not materialise in the
cabin. The most important signal, the
2nd order driver side interior noise,
remained largely unaffected.
A further optimisation (e.g. through
algorithm tuning, shaker inclination or
sensor repositioning) of this setup would
have been possible but it was deemed
more effective to use a microphone next.
Eventually, a driver side microphone was
used as the error signal to control the
actuator. The actuator itself was still
placed near the RHS powertrain mount
in pure vertical direction.
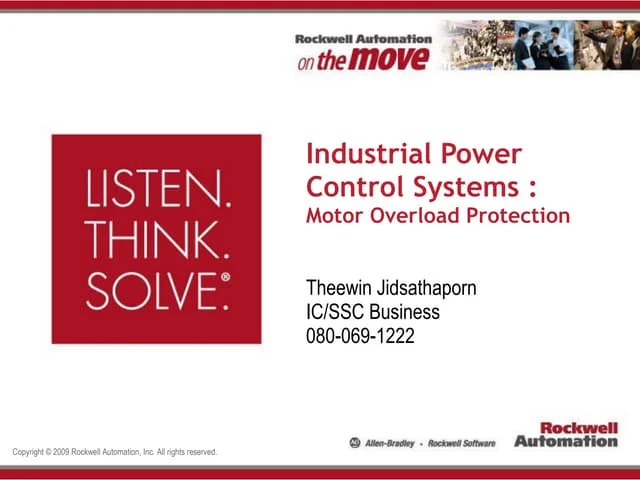
FIGURE 5 and FIGURE 6 illustrate the
measurement results for the final opti-
mised system setup. Due to the lack of
balance shafts, the range extender pro-
-30
-20
-10
0
10
20
30
40
1000 1500 2000 2500 3000 3500 4000 4500
Acceleration[dB(m/s2
)]
Engine speed [rpm]
RHS X
RHS Y
RHS Z
LHS Z
FIGURE 4 2nd order powertrain
side vibration levels during
engine run-up (RHS= right
hand side, LHS= left hand side)
25
30
35
40
45
50
55
60
65
70
1500 2000 2500 3000 3500 4000 4500 5000
Interiornoise[dB(A)]
Engine speed [rpm]
AVC off
AVC on
Target
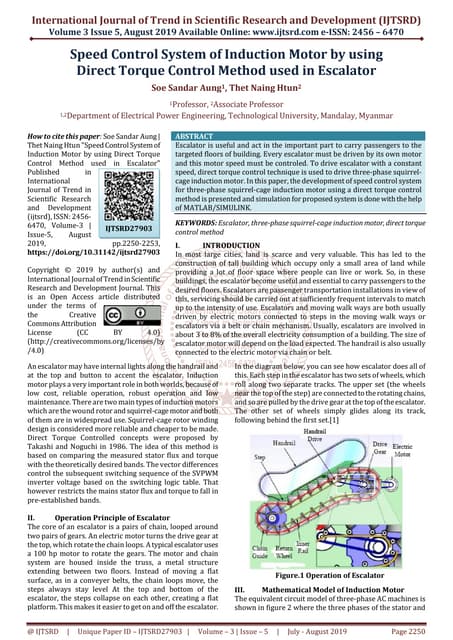
25
30
35
40
45
50
55
60
65
70
1500 2000 2500 3000 3500 4000 4500 5000
Interiornoise[dB(A)]
Engine speed [rpm]
AVC off
AVC on
Target
FIGURE 5 Sample noise pressure level of engine order 2 on driver‘s side – without AVC (red) and with AVC (blue)
FIGURE 6 Sample noise pressure level of engine order 2 on passenger‘s side – without AVC (red) and with AVC (blue)
06I2015 Volume 117 17](https://image.slidesharecdn.com/655c7da3-fe94-4f25-be50-5838fc1f1d17-150623221913-lva1-app6891/85/ATZ_Trelleborg_06-2015-4-320.jpg)
![duces a dominant vibration of engine
order 2, which is perceived in the form of
booming noises in the interior of the
vehicle (red curve). The customer
requirement was to reduce the interior
noise below the level of a benchmark
vehicle equipped with balance shafts
and switchable engine mounts. By using
the AVC system, interior noise (blue line)
was reduced significantly by up to 20 dB.
As illustrated by the measurement
results, the customer‘s requirements
(black dashed line) were exceeded over
the entire rotational speed range for all
passengers.
SYSTEM INTEGRATION IMPROVES
COST-EFFECTIVNESS
Be it for three-, four-, five- or six-cylin-
der, cylinder deactivation, missing bal-
ance shafts or electric vehicles with
combustion engines as range extenders,
the technology illustrated here can bring
about a significant reduction in noise
and vibration in many different kinds of
vehicles. With the growing number of
hybrid vehicles, downsizing concepts
with three- or four-cylinder engines, and
further lightweight design techniques
throughout the entire vehicle, active
solutions like these provide a response to
the vibration control challenges of
energy-saving vehicle concepts. In this
specific investigation it was shown that
even a single actuator AVC system with
open loop control is already sufficient to
meet the customers NVH requirements.
It is able to reduce interior noise over a
wide range of frequencies to levels other-
wise only achievable through balance
shaft units or the like. This is especially
remarkable since the AVC has no direct
impact on the air borne noise paths
between the engine and the driver’s ear.
Future developments will focus on inte-
grating sensors, controllers and actuators
into a single unit. This system integra-
tion will further improve cost-effective-
ness and reduce weight, while helping to
widely establish active approaches on
the market.
REFERENCE
[1] TrelleborgVibracoustic (Hrsg.): Schwingungs
technik im Automobil, Vogel Business Media,
Würzburg, 2015
DEVELOPMENT Acoustics | NVH
18](https://image.slidesharecdn.com/655c7da3-fe94-4f25-be50-5838fc1f1d17-150623221913-lva1-app6891/85/ATZ_Trelleborg_06-2015-5-320.jpg)