Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
SaruwatariLabUTokyo
15,152 views
Asj2017 3 bileveloptnmf
ASJ 2017 Spring Meeting
Engineering
◦
Read more
0
Save
Share
Embed
Embed presentation
Download
Downloaded 11 times
1
/ 17
2
/ 17
3
/ 17
4
/ 17
5
/ 17
6
/ 17
7
/ 17
8
/ 17
9
/ 17
10
/ 17
11
/ 17
12
/ 17
13
/ 17
14
/ 17
15
/ 17
16
/ 17
17
/ 17
More Related Content
PDF
複素ラプラス分布に基づく非負値行列因子分解
by
Hiroki_Tanji
PDF
バイアス付きMMSE-STSA推定器の理論解析およびミュージカルノイズフリー雑音抑圧への拡張
by
奈良先端大 情報科学研究科
PPTX
Music signal separation using supervised nonnegative matrix factorization wit...
by
Daichi Kitamura
PPTX
Divergence optimization based on trade-off between separation and extrapolati...
by
Daichi Kitamura
PDF
Ea2015 7for ss
by
SaruwatariLabUTokyo
PPTX
独立性基準を用いた非負値行列因子分解の効果的な初期値決定法(Statistical-independence-based efficient initia...
by
Daichi Kitamura
PDF
Kameoka2012 talk07 1
by
kame_hirokazu
PPTX
Discriminative SNMF EA201603
by
SaruwatariLabUTokyo
複素ラプラス分布に基づく非負値行列因子分解
by
Hiroki_Tanji
バイアス付きMMSE-STSA推定器の理論解析およびミュージカルノイズフリー雑音抑圧への拡張
by
奈良先端大 情報科学研究科
Music signal separation using supervised nonnegative matrix factorization wit...
by
Daichi Kitamura
Divergence optimization based on trade-off between separation and extrapolati...
by
Daichi Kitamura
Ea2015 7for ss
by
SaruwatariLabUTokyo
独立性基準を用いた非負値行列因子分解の効果的な初期値決定法(Statistical-independence-based efficient initia...
by
Daichi Kitamura
Kameoka2012 talk07 1
by
kame_hirokazu
Discriminative SNMF EA201603
by
SaruwatariLabUTokyo
What's hot
PDF
(文献紹介)Deep Unrolling: Learned ISTA (LISTA)
by
Morpho, Inc.
PDF
大規模凸最適化問題に対する勾配法
by
京都大学大学院情報学研究科数理工学専攻
PDF
(文献紹介) 画像復元:Plug-and-Play ADMM
by
Morpho, Inc.
PDF
SLP研究会201902 正弦関数摂動 von Mises 分布 DNN の モード近似を用いた位相復元
by
Shinnosuke Takamichi
PDF
1次式とノルムで構成された最適化問題とその双対問題
by
京都大学大学院情報学研究科数理工学専攻
PDF
Ieice中国地区
by
nozomuhamada
PDF
フーリエ変換と画像圧縮の仕組み
by
yuichi takeda
PDF
変調スペクトルを考慮したHMM音声合成
by
奈良先端大 情報科学研究科
PDF
El text.tokuron a(2019).ishimura190718
by
RCCSRENKEI
PDF
MIRU2016 チュートリアル
by
Shunsuke Ono
PPTX
光源方向推定のための構造色パターンマッチング
by
uranishi
PPTX
Efficient multichannel nonnegative matrix factorization with rank-1 spatial m...
by
Daichi Kitamura
PDF
(文献紹介)エッジ保存フィルタ:Side Window Filter, Curvature Filter
by
Morpho, Inc.
PPTX
ILRMA 20170227 danwakai
by
SaruwatariLabUTokyo
PPTX
非負値行列分解の確率的生成モデルと 多チャネル音源分離への応用 (Generative model in nonnegative matrix facto...
by
Daichi Kitamura
PPTX
Study on optimal divergence for superresolution-based supervised nonnegative ...
by
Daichi Kitamura
PDF
Transfer forest(PRMU Jun 2014)
by
Masamitsu Tsuchiya
PDF
最終講義
by
nozomuhamada
PDF
200528material takahashi
by
RCCSRENKEI
PPTX
Evaluation of separation accuracy for various real instruments based on super...
by
Daichi Kitamura
(文献紹介)Deep Unrolling: Learned ISTA (LISTA)
by
Morpho, Inc.
大規模凸最適化問題に対する勾配法
by
京都大学大学院情報学研究科数理工学専攻
(文献紹介) 画像復元:Plug-and-Play ADMM
by
Morpho, Inc.
SLP研究会201902 正弦関数摂動 von Mises 分布 DNN の モード近似を用いた位相復元
by
Shinnosuke Takamichi
1次式とノルムで構成された最適化問題とその双対問題
by
京都大学大学院情報学研究科数理工学専攻
Ieice中国地区
by
nozomuhamada
フーリエ変換と画像圧縮の仕組み
by
yuichi takeda
変調スペクトルを考慮したHMM音声合成
by
奈良先端大 情報科学研究科
El text.tokuron a(2019).ishimura190718
by
RCCSRENKEI
MIRU2016 チュートリアル
by
Shunsuke Ono
光源方向推定のための構造色パターンマッチング
by
uranishi
Efficient multichannel nonnegative matrix factorization with rank-1 spatial m...
by
Daichi Kitamura
(文献紹介)エッジ保存フィルタ:Side Window Filter, Curvature Filter
by
Morpho, Inc.
ILRMA 20170227 danwakai
by
SaruwatariLabUTokyo
非負値行列分解の確率的生成モデルと 多チャネル音源分離への応用 (Generative model in nonnegative matrix facto...
by
Daichi Kitamura
Study on optimal divergence for superresolution-based supervised nonnegative ...
by
Daichi Kitamura
Transfer forest(PRMU Jun 2014)
by
Masamitsu Tsuchiya
最終講義
by
nozomuhamada
200528material takahashi
by
RCCSRENKEI
Evaluation of separation accuracy for various real instruments based on super...
by
Daichi Kitamura
Viewers also liked
PDF
数値解析と物理学
by
すずしめ
PDF
Asj2017 3invited
by
SaruwatariLabUTokyo
PPTX
Koyama ASA ASJ joint meeting 2016
by
SaruwatariLabUTokyo
PDF
Moment matching networkを用いた音声パラメータのランダム生成の検討
by
Shinnosuke Takamichi
PDF
Dsp2015for ss
by
SaruwatariLabUTokyo
PDF
HMMに基づく日本人英語音声合成における中学生徒の英語音声を用いた評価
by
Shinnosuke Takamichi
PPTX
独立性に基づくブラインド音源分離の発展と独立低ランク行列分析 History of independence-based blind source sep...
by
Daichi Kitamura
PDF
Apsipa2016for ss
by
SaruwatariLabUTokyo
PDF
Ica2016 312 saruwatari
by
SaruwatariLabUTokyo
PPTX
Koyama AES Conference SFC 2016
by
SaruwatariLabUTokyo
PPTX
Hybrid NMF APSIPA2014 invited
by
SaruwatariLabUTokyo
PDF
Slp201702
by
Yuki Saito
数値解析と物理学
by
すずしめ
Asj2017 3invited
by
SaruwatariLabUTokyo
Koyama ASA ASJ joint meeting 2016
by
SaruwatariLabUTokyo
Moment matching networkを用いた音声パラメータのランダム生成の検討
by
Shinnosuke Takamichi
Dsp2015for ss
by
SaruwatariLabUTokyo
HMMに基づく日本人英語音声合成における中学生徒の英語音声を用いた評価
by
Shinnosuke Takamichi
独立性に基づくブラインド音源分離の発展と独立低ランク行列分析 History of independence-based blind source sep...
by
Daichi Kitamura
Apsipa2016for ss
by
SaruwatariLabUTokyo
Ica2016 312 saruwatari
by
SaruwatariLabUTokyo
Koyama AES Conference SFC 2016
by
SaruwatariLabUTokyo
Hybrid NMF APSIPA2014 invited
by
SaruwatariLabUTokyo
Slp201702
by
Yuki Saito
Similar to Asj2017 3 bileveloptnmf
PDF
SMO徹底入門 - SVMをちゃんと実装する
by
sleepy_yoshi
PDF
双対性
by
Yoichi Iwata
PDF
サポートベクターマシン(SVM)の数学をみんなに説明したいだけの会
by
Kenyu Uehara
PPTX
【招待講演】パラメータ制約付き行列分解のベイズ汎化誤差解析【StatsML若手シンポ2020】
by
Naoki Hayashi
PDF
修士論文発表:「非負値行列分解における漸近的Bayes汎化誤差」
by
Naoki Hayashi
PDF
一般化反復射影法に基づく時変劣ガウス独立低ランク行列分析
by
Shin-ichi Mogami
PDF
PRML 5.2.1-5.3.3 ニューラルネットワークの学習 (誤差逆伝播) / Training Neural Networks (Backpropa...
by
Akihiro Nitta
PDF
PRML chapter7
by
Takahiro (Poly) Horikawa
PDF
Oshasta em
by
Naotaka Yamada
PDF
E-SOINN
by
SOINN Inc.
PDF
深層乗算更新アルゴリズムを用いた非負値行列因子分解の統計モデルの学習
by
Hiroki_Tanji
PDF
PRML5
by
Hidekazu Oiwa
PDF
はじめてのパターン認識 第8章 サポートベクトルマシン
by
Motoya Wakiyama
PPTX
SVM
by
Yuki Nakayama
PDF
PRML_from5.1to5.3.1
by
禎晃 山崎
PDF
ロボット家電と制御 Domestic robotics: mechanisms and control
by
Yoichi Yamazaki
PDF
Semi-supervised Active Learning Survey
by
Yo Ehara
PDF
PATTERN RECOGNITION AND MACHINE LEARNING (1.1)
by
Yuma Yoshimoto
PDF
コンピュータービジョン最先端ガイド2 3.4ベクトルデータに対するカーネル法(SVM)
by
Takahiro (Poly) Horikawa
PDF
SVM
by
Yuki Nakayama
SMO徹底入門 - SVMをちゃんと実装する
by
sleepy_yoshi
双対性
by
Yoichi Iwata
サポートベクターマシン(SVM)の数学をみんなに説明したいだけの会
by
Kenyu Uehara
【招待講演】パラメータ制約付き行列分解のベイズ汎化誤差解析【StatsML若手シンポ2020】
by
Naoki Hayashi
修士論文発表:「非負値行列分解における漸近的Bayes汎化誤差」
by
Naoki Hayashi
一般化反復射影法に基づく時変劣ガウス独立低ランク行列分析
by
Shin-ichi Mogami
PRML 5.2.1-5.3.3 ニューラルネットワークの学習 (誤差逆伝播) / Training Neural Networks (Backpropa...
by
Akihiro Nitta
PRML chapter7
by
Takahiro (Poly) Horikawa
Oshasta em
by
Naotaka Yamada
E-SOINN
by
SOINN Inc.
深層乗算更新アルゴリズムを用いた非負値行列因子分解の統計モデルの学習
by
Hiroki_Tanji
PRML5
by
Hidekazu Oiwa
はじめてのパターン認識 第8章 サポートベクトルマシン
by
Motoya Wakiyama
SVM
by
Yuki Nakayama
PRML_from5.1to5.3.1
by
禎晃 山崎
ロボット家電と制御 Domestic robotics: mechanisms and control
by
Yoichi Yamazaki
Semi-supervised Active Learning Survey
by
Yo Ehara
PATTERN RECOGNITION AND MACHINE LEARNING (1.1)
by
Yuma Yoshimoto
コンピュータービジョン最先端ガイド2 3.4ベクトルデータに対するカーネル法(SVM)
by
Takahiro (Poly) Horikawa
SVM
by
Yuki Nakayama
Recently uploaded
PDF
音楽アーティスト探索体験に特化した音楽ディスカバリーWebサービス「DigLoop」|Created byヨハク技研
by
yohakugiken
PPTX
君をむしばむこの力で_最終発表-1-Monthon2025最終発表用資料-.pptx
by
rintakano624
PDF
ソフトウェアエンジニアがクルマのコアを創る!? モビリティの価値を最大化するソフトウェア開発の最前線【DENSO Tech Night 第一夜】
by
dots.
PDF
krsk_aws_re-growth_aws_devops_agent_20251211
by
uedayuki
PDF
ソフトとハードの二刀流で実現する先進安全・自動運転のアルゴリズム開発【DENSO Tech Night 第二夜】 ー高精度な画像解析 / AI推論モデル ...
by
dots.
PDF
2025/12/12 AutoDevNinjaピッチ資料 - 大人な男のAuto Dev環境
by
Masahiro Takechi
音楽アーティスト探索体験に特化した音楽ディスカバリーWebサービス「DigLoop」|Created byヨハク技研
by
yohakugiken
君をむしばむこの力で_最終発表-1-Monthon2025最終発表用資料-.pptx
by
rintakano624
ソフトウェアエンジニアがクルマのコアを創る!? モビリティの価値を最大化するソフトウェア開発の最前線【DENSO Tech Night 第一夜】
by
dots.
krsk_aws_re-growth_aws_devops_agent_20251211
by
uedayuki
ソフトとハードの二刀流で実現する先進安全・自動運転のアルゴリズム開発【DENSO Tech Night 第二夜】 ー高精度な画像解析 / AI推論モデル ...
by
dots.
2025/12/12 AutoDevNinjaピッチ資料 - 大人な男のAuto Dev環境
by
Masahiro Takechi
Asj2017 3 bileveloptnmf
1.
2017年日本音響学会春季研究発表会 NMFにおける識別的基底学習のための 2段階最適化 ☆遠藤宣明(東大),中嶋広明(東大),高宗典玄(東大), 高道慎之介(東大),猿渡洋(東大),小野順貴(NII / 総研大), 高橋祐(ヤマハ),近藤多伸(ヤマハ)
2.
非負値行列因子分解(NMF) • NMF [Lee
& Seung, 1999] – 非負値行列を非負値行列の積に低ランク近似 – 画像処理、自動採譜など応用先は様々 – 音源分離の場合,音源のスペクトログラムを基底行列と アクティベーション行列に分解 Time Time Frequency 𝑭 𝑮 𝑡 𝒀 𝑡 Frequency Amplitude Amplitude 観測行列 (スペクトログラム) 基底行列 (頻出スペクトルパターン) アクティベーション行列 (時間的なゲイン変化) 𝑓 : 周波数ビン数 𝑡 : 時間フレーム数 𝑘 : 基底数 2/17
3.
音源分離と教師ありNMF • 教師ありNMF(supervised NMF:
SNMF)[Smaragdis et al., 2007] – 教師基底に重複する特徴が多い場合,分離性能が低下 分離プロセス 教師基底𝑭, 𝑯を固定して𝑸, 𝑿を構成 𝒀mix 学習プロセス 目的の楽器の教師音を用いて学習した基底行列 特徴が重複しないように基底を学習させて、分離性能を向上させたい = 𝑯 𝑼 𝑭 𝑮 𝑭 𝑸 𝑯 𝑿 3/17
4.
2段階最適化問題としての音源分離問題 • 2段階最適化問題 – 下位制約関数が最適化問題で記述されている –
2つの最適化問題の変数が互いに入れ子構造を形成 𝑭 = argmin 𝑭,𝑮 𝔇KL 𝒀 𝟏 𝑭 𝑮 , 𝑯 = argmin 𝑯,𝑼 𝔇KL 𝒀 𝟐 𝑯 𝑼 s. t. 𝑮, 𝑼 = argmin 𝑮,𝑼 𝔇KL 𝒀mix 𝑭 𝑮 + 𝑯 𝑼 上位目的関数 教師音𝒀 𝟏, 𝒀 𝟐から 教師基底𝑭, 𝑯をNMFで学習 下位制約関数 アクティベーション行列𝑮, 𝑼は 混合音𝒀mixをよく表現できる 4/17
5.
2段階最適化問題としての音源分離問題 • 従来研究 [Weninger
et al., 2014] – 仮定を設け,問題を緩和→厳密性を損なう 𝑭 = argmin 𝑭,𝑮 𝔇KL 𝒀 𝟏 𝑭 𝑮 , 𝑯 = argmin 𝑯,𝑼 𝔇KL 𝒀 𝟐 𝑯 𝑼 s. t. 𝑮, 𝑼 = argmin 𝑮,𝑼 𝔇KL 𝒀mix 𝑭 𝑮 + 𝑯 𝑼 上位目的関数 教師音𝒀 𝟏, 𝒀 𝟐から 教師基底𝑭, 𝑯をNMFで学習 下位制約関数 アクティベーション行列𝑮, 𝑼は 混合音𝒀mixをよく表現できる 𝑭 = argmin 𝑭,𝑮 𝔇KL 𝒀 𝟏 𝑭 𝑮 , 𝑯 = argmin 𝑯,𝑼 𝔇KL 𝒀 𝟐 𝑯 𝑼 s. t. 𝑮, 𝑼 = argmin 𝑮,𝑼 𝔇KL 𝒀mix 𝑭(∗) 𝑮 + 𝑯(∗) 𝑼 𝑭(∗) = argmin 𝑭, 𝑮 𝔇KL 𝒀 𝟏 𝑭 𝑮 , 𝑯(∗) = argmin 𝑯, 𝑼 𝔇KL 𝒀 𝟐 𝑯 𝑼 5/17 下位制約関数中の基底行列𝑭 ∗ , 𝑯(∗)を事前学習したものから動かさない
6.
2段階最適化問題としての音源分離問題 • 提案手法 – 下位問題を等式制約に置き換える –
非負値制約付きのargminによる問題をどう等式制約とするか? – 等式制約を罰金関数化して、上位目的関数に組み込む 下位問題はNMFの形→独立に解くと乗算更新式が得られる(更新係数が非 負であれば非負値制約を満たしたまま解が得られる) →乗算更新式の等号が成り立てば更新が停留する →停留に関する等式制約が得られる+非負値制約も解決 min 𝑭,𝑮,𝑯,𝑼 𝔇KL 𝒀 𝟏 𝑭𝑮 + 𝔇KL 𝒀 𝟐 𝑯𝑼 + 𝛼 𝐺 𝐶 𝐺 + 𝛼 𝑈 𝐶 𝑈 上位目的関数 罰金関数項 上位目的関数 教師音𝒀 𝟏, 𝒀 𝟐から 教師基底𝑭, 𝑯をNMFで学習 下位制約関数 アクティベーション行列𝑮, 𝑼は 混合音𝒀mixをよく表現できる 𝑭 = argmin 𝑭,𝑮 𝔇KL 𝒀 𝟏 𝑭 𝑮 , 𝑯 = argmin 𝑯,𝑼 𝔇KL 𝒀 𝟐 𝑯 𝑼 s. t. 𝑮, 𝑼 = argmin 𝑮,𝑼 𝔇KL 𝒀mix 𝑭 𝑮 + 𝑯 𝑼 6/17
7.
乗算更新式による罰金関数の導出 補助関数法で下位問題を解いたときの 𝑮の乗算更新式 𝐺 𝑘,𝑡
← 𝐺 𝑘,𝑡 𝑌mix 𝜔,𝑡 𝐹 𝜔,𝑘 𝐹 𝜔,𝑘′𝑘′ 𝐺 𝑘′,𝑡 + 𝐻 𝜔,𝑙′ 𝑈𝑙′,𝑡𝑙′ 𝜔 𝐹 𝜔,𝑘𝜔 乗算更新式 下位目的関数の停留点では 更新式の「←」は等号になるはず 等式制約 𝐺 𝑘,𝑡 = 𝐺 𝑘,𝑡 𝑌mix 𝜔,𝑡 𝐹 𝜔,𝑘 𝐹 𝜔,𝑘′𝑘′ 𝐺 𝑘′,𝑡 + 𝐻 𝜔,𝑙′ 𝑈𝑙′,𝑡𝑙′ 𝜔 𝐹 𝜔,𝑘𝜔 罰金関数 𝐶 𝐺 = 𝐺 𝑘,𝑡 2 𝑌mix 𝜔,𝑡 𝐹 𝜔,𝑘 𝐹 𝜔,𝑘′𝑘′ 𝐺 𝑘′,𝑡 + 𝐻 𝜔,𝑙′ 𝑈𝑙′,𝑡𝑙′ 𝜔 𝐹 𝜔,𝑘𝜔 − 1 2 𝑡𝑘 両辺の差の2乗が罰金関数 𝐶 𝑈についても同様に定められる. 7/17
8.
最適化問題の求解 • 罰金付きの目的関数を非負値制約の下で解かねばならない – 通常のNMFのように補助関数法で解くことが困難 →
乗算型の最急降下法[Fevotte et al., 2009]で解く 𝜕 𝜕𝐹Ω,𝐾 𝔇KL 𝒀 𝟏 𝑭𝑮 + 𝔇KL 𝒀 𝟐 𝑯𝑼 + 𝛼 𝐺 𝐶 𝐺 + 𝛼 𝑈 𝐶 𝑈 = 𝐺 𝐾,𝑡 − 𝑌1Ω,𝑡 𝐺 𝐾,𝑡 𝐹Ω,𝑘′ 𝐺 𝑘′,𝑡𝑘′ 𝑡 + ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ 項別に展開、整理 = 𝐺 𝐾,𝑡 𝑡 + ⋯ ⋯ ⋯ ⋯ − 𝑌1Ω,𝑡 𝐺 𝐾,𝑡 𝐹Ω,𝑘′ 𝐺 𝑘′,𝑡𝑘′ 𝑡 + ⋯ ⋯ ⋯ ⋯ 正の項の和 負の項の和 = Δ𝑓+ − Δ𝑓− 最急降下法の式 𝐹Ω,𝐾 ← 𝐹Ω,𝐾 − 𝜂(Δ𝑓+ − Δ𝑓− ) ステップ幅の設定 𝜂 = 𝐹Ω,𝐾 Δ𝑓+ 乗算型最急降下法 𝐹Ω,𝐾 ← 𝐹Ω,𝐾 × Δ𝑓− Δ𝑓+ 非負制約を容易に解決 非負の更新係数 8/17
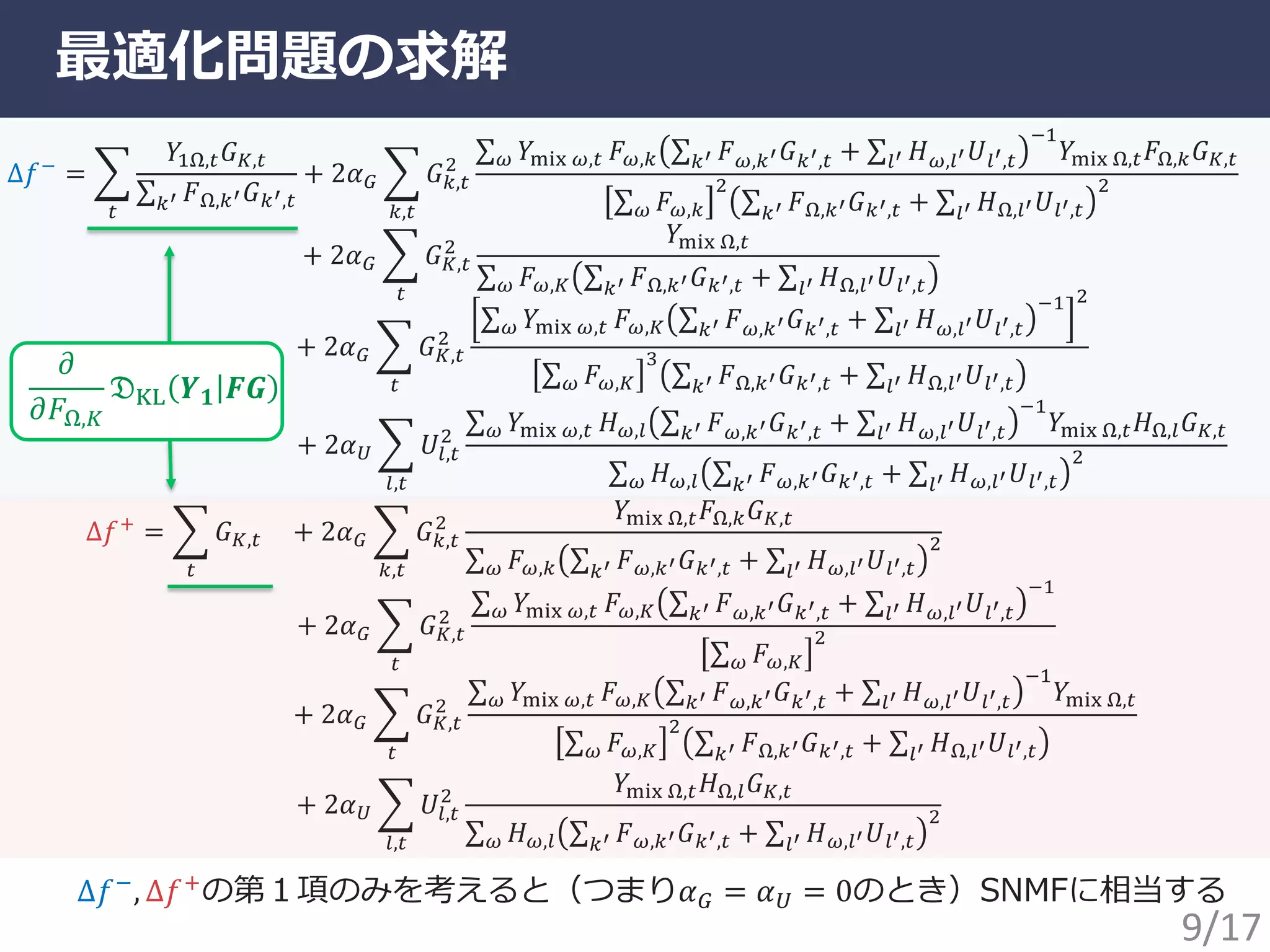
9.
最適化問題の求解 Δ𝑓− = 𝑌1Ω,𝑡 𝐺 𝐾,𝑡 𝐹Ω,𝑘′
𝐺 𝑘′,𝑡𝑘′ 𝑡 + 2𝛼 𝐺 𝐺 𝑘,𝑡 2 𝑘,𝑡 𝑌mix 𝜔,𝑡𝜔 𝐹 𝜔,𝑘 𝐹 𝜔,𝑘′ 𝐺 𝑘′,𝑡𝑘′ + 𝐻 𝜔,𝑙′ 𝑈𝑙′,𝑡𝑙′ −1 𝑌mix Ω,𝑡 𝐹Ω,𝑘 𝐺 𝐾,𝑡 𝐹 𝜔,𝑘𝜔 2 𝐹Ω,𝑘′ 𝐺 𝑘′,𝑡𝑘′ + 𝐻Ω,𝑙′ 𝑈𝑙′,𝑡𝑙′ 2 + 2𝛼 𝐺 𝐺 𝐾,𝑡 2 𝑡 𝑌mix Ω,𝑡 𝐹 𝜔,𝐾 𝐹Ω,𝑘′ 𝐺 𝑘′,𝑡𝑘′ + 𝐻Ω,𝑙′ 𝑈𝑙′,𝑡𝑙′𝜔 + 2𝛼 𝐺 𝐺 𝐾,𝑡 2 𝑡 𝑌mix 𝜔,𝑡𝜔 𝐹 𝜔,𝐾 𝐹 𝜔,𝑘′ 𝐺 𝑘′,𝑡𝑘′ + 𝐻 𝜔,𝑙′ 𝑈𝑙′,𝑡𝑙′ −1 2 𝐹 𝜔,𝐾𝜔 3 𝐹Ω,𝑘′ 𝐺 𝑘′,𝑡𝑘′ + 𝐻Ω,𝑙′ 𝑈𝑙′,𝑡𝑙′ + 2𝛼 𝑈 𝑈𝑙,𝑡 2 𝑙,𝑡 𝑌mix 𝜔,𝑡𝜔 𝐻 𝜔,𝑙 𝐹 𝜔,𝑘′ 𝐺 𝑘′,𝑡𝑘′ + 𝐻 𝜔,𝑙′ 𝑈𝑙′,𝑡𝑙′ −1 𝑌mix Ω,𝑡 𝐻Ω,𝑙 𝐺 𝐾,𝑡 𝐻 𝜔,𝑙 𝐹 𝜔,𝑘′ 𝐺 𝑘′,𝑡𝑘′ + 𝐻 𝜔,𝑙′ 𝑈𝑙′,𝑡𝑙′ 2 𝜔 Δ𝑓+ = 𝐺 𝐾,𝑡 𝑡 + 2𝛼 𝐺 𝐺 𝑘,𝑡 2 𝑘,𝑡 𝑌mix Ω,𝑡 𝐹Ω,𝑘 𝐺 𝐾,𝑡 𝐹 𝜔,𝑘 𝐹 𝜔,𝑘′ 𝐺 𝑘′,𝑡𝑘′ + 𝐻 𝜔,𝑙′ 𝑈𝑙′,𝑡𝑙′ 2 𝜔 + 2𝛼 𝐺 𝐺 𝐾,𝑡 2 𝑡 𝑌mix 𝜔,𝑡𝜔 𝐹 𝜔,𝐾 𝐹 𝜔,𝑘′ 𝐺 𝑘′,𝑡𝑘′ + 𝐻 𝜔,𝑙′ 𝑈𝑙′,𝑡𝑙′ −1 𝐹 𝜔,𝐾𝜔 2 + 2𝛼 𝐺 𝐺 𝐾,𝑡 2 𝑡 𝑌mix 𝜔,𝑡𝜔 𝐹 𝜔,𝐾 𝐹 𝜔,𝑘′ 𝐺 𝑘′,𝑡𝑘′ + 𝐻 𝜔,𝑙′ 𝑈𝑙′,𝑡𝑙′ −1 𝑌mix Ω,𝑡 𝐹 𝜔,𝐾𝜔 2 𝐹Ω,𝑘′ 𝐺 𝑘′,𝑡𝑘′ + 𝐻Ω,𝑙′ 𝑈𝑙′,𝑡𝑙′ + 2𝛼 𝑈 𝑈𝑙,𝑡 2 𝑙,𝑡 𝑌mix Ω,𝑡 𝐻Ω,𝑙 𝐺 𝐾,𝑡 𝐻 𝜔,𝑙 𝐹 𝜔,𝑘′ 𝐺 𝑘′,𝑡𝑘′ + 𝐻 𝜔,𝑙′ 𝑈𝑙′,𝑡𝑙′ 2 𝜔 Δ𝑓−, Δ𝑓+の第1項のみを考えると(つまり𝛼 𝐺 = 𝛼 𝑈 = 0のとき)SNMFに相当する 𝜕 𝜕𝐹Ω,𝐾 𝔇KL 𝒀 𝟏 𝑭𝑮 9/17
10.
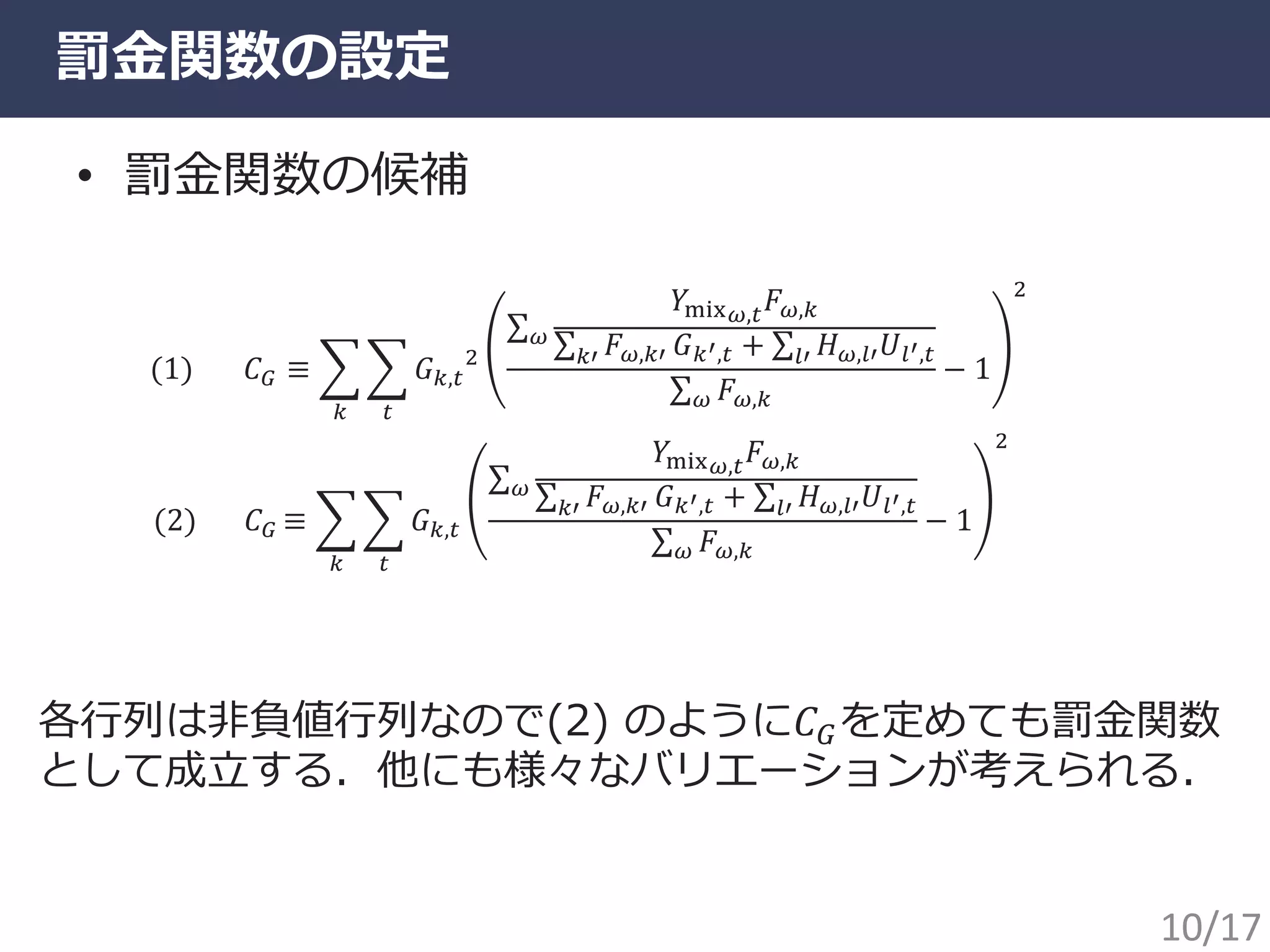
罰金関数の設定 • 罰金関数の候補 (2) 𝐶
𝐺 ≡ 𝐺 𝑘,𝑡 𝑌mix 𝜔,𝑡 𝐹 𝜔,𝑘 𝐹 𝜔,𝑘′𝑘′ 𝐺 𝑘′,𝑡 + 𝐻 𝜔,𝑙′ 𝑈𝑙′,𝑡𝑙′ 𝜔 𝐹 𝜔,𝑘𝜔 − 1 2 𝑡𝑘 (1) 𝐶 𝐺 ≡ 𝐺 𝑘,𝑡 2 𝑌mix 𝜔,𝑡 𝐹 𝜔,𝑘 𝐹 𝜔,𝑘′𝑘′ 𝐺 𝑘′,𝑡 + 𝐻 𝜔,𝑙′ 𝑈𝑙′,𝑡𝑙′ 𝜔 𝐹 𝜔,𝑘𝜔 − 1 2 𝑡𝑘 各行列は非負値行列なので(2) のように𝐶 𝐺を定めても罰金関数 として成立する.他にも様々なバリエーションが考えられる. 10/17
11.
トイモデルに対する実験 • 実験条件 – 乱数シードは固定 –
個別教師音𝒀 𝟏, 𝒀 𝟐:各要素が形状母数0.4, 尺度母数1のガ ンマ分布に従う行列𝑭, 𝑮, 𝑯, 𝑼の積を生成し,これにガウス ノイズ(平均0、分散10−4)を加えたもの – 𝑭𝑮,𝑯𝑼のサイズは65×100,ランクは10 – 混合教師音は𝒀 𝟏 + 𝒀 𝟐に一様乱数で生成した位相を加えた もの – NMFの際の行列の基底数は5 – 各行列の初期値は乱数で生成(乱数シードは固定) 11/17
12.
トイモデルに対する実験 • 混合音源に対する目的関数値 𝔇KL 𝒀
𝐦𝐢𝐱 𝑭𝑮 + 𝑯𝑼 のグラフ(重み係数 = 10) KKT条件由来の更新則 SNMF ※KKT条件由来の更新則: 下位問題を不等式制約付き 最適化問題とみなして, KKT条件から導かれる 等号条件を罰金化して 得られる更新則 乗算更新式由来の更新則 • 下位制約の効果でSNMFよりも最適な解へ収束している. • KKT条件由来の更新則は収束が遅い. 12/17 罰金関数(1) 罰金関数(2)
13.
トイモデルに対する実験 • 個別音源に対する目的関数値 𝔇KL 𝒀
𝟏 𝑭𝑮 のグラフ(重み係数 = 10) KKT条件由来の更新則 SNMF ※KKT条件由来の更新則: 下位問題を不等式制約付き 最適化問題とみなして, KKT条件から導かれる 等号条件を罰金化して 得られる更新則 乗算更新式由来の更新則 • 下位制約により,SNMFに比べて上位目的関数値は増加する. • KKT条件由来の更新則は収束が遅い. 13/17 罰金関数(1) 罰金関数(2)
14.
実データに対する実験 • 実験条件(訓練時) – 個別音の訓練データ𝒀
𝟏, 𝒀 𝟐:2つの楽器の24音階分のMIDI信 号(YAMAHA)𝑦1 𝑡 , 𝑦2(𝑡)の振幅スペクトログラム. – 各信号のサンプリング周波数は44.1 kHz, STFTの窓長は 1024 点,Hanning窓を使用 – 訓練データ中の音階数は24 – 混合教師音𝒀 𝟑は𝑦1 𝑡 + 𝑦2(𝑡)の振幅スペクトログラム – 基底行列の基底数は100 – 各行列の初期値は乱数で生成(乱数シードは固定) – 評価指標:signal to distortion ratio (SDR) • SN比と信号の歪みの両方を考慮した指標 • ダイナミックレンジが狭く人間は0.5 dB差も知覚可能 14/17
15.
実データに対する実験 • 実験条件(分離時) – テストデータとして2つの楽器音𝑦1 t 𝑡
, 𝑦2 t 𝑡 からなる曲 [Kitamura et al., 2014] 𝑦t 𝑡 = 𝑦1 t 𝑡 + 𝑦2 t 𝑡 を与え,そのスペ クトログラム𝒀𝐭に対して個別教師音に対するNMFおよび提案手 法で推定した基底行列を用いてSNMFを行う. – 10種類の初期値から計算を行い,平均SDRで分離度評価 15/17
16.
実験結果 • 平均SDR [dB] 楽器の組 楽器1 SNMF 楽器1 Proposed 楽器2 SNMF 楽器2 Proposed Fg
& Fl 13.5 14.6 13.8 17.0 Fg & Hp 16.6 18.2 5.80 8.59 Fg & Hr 4.03 5.24 6.39 6.53 Fl & Hp 15.7 16.2 4.21 5.55 Fl & Hr 3.37 7.14 5.02 8.25 Hp & Hr 3.60 5.27 16.4 17.2 Average 9.48 11.1 8.61 10.5 • SNMFに比べ分離精度が大幅に改善された. 16/17
17.
まとめ • 識別的基底学習を定式化した2段階最適化問題に対して, 下位制約関数の停留点条件を利用して局所最適解を導出 した. • NMFで用いられる乗算更新式の停留条件に着目し,等式 制約を導き,罰金関数として上位目的関数に組み込んだ. •
実データの音源分離において,平均SDRがSNMFに比べ 実験的に改善された. 17/17
Download

![非負値行列因子分解(NMF)
• NMF [Lee & Seung, 1999]
– 非負値行列を非負値行列の積に低ランク近似
– 画像処理、自動採譜など応用先は様々
– 音源分離の場合,音源のスペクトログラムを基底行列と
アクティベーション行列に分解
Time
Time
Frequency
𝑭 𝑮
𝑡
𝒀
𝑡
Frequency
Amplitude
Amplitude
観測行列
(スペクトログラム)
基底行列
(頻出スペクトルパターン)
アクティベーション行列
(時間的なゲイン変化)
𝑓 : 周波数ビン数
𝑡 : 時間フレーム数
𝑘 : 基底数
2/17](https://image.slidesharecdn.com/asj2017-3bileveloptnmf-170408002528/75/Asj2017-3-bileveloptnmf-2-2048.jpg)
![音源分離と教師ありNMF
• 教師ありNMF(supervised NMF: SNMF)[Smaragdis et al., 2007]
– 教師基底に重複する特徴が多い場合,分離性能が低下
分離プロセス
教師基底𝑭, 𝑯を固定して𝑸, 𝑿を構成
𝒀mix
学習プロセス 目的の楽器の教師音を用いて学習した基底行列
特徴が重複しないように基底を学習させて、分離性能を向上させたい
=
𝑯
𝑼
𝑭
𝑮
𝑭
𝑸
𝑯
𝑿
3/17](https://image.slidesharecdn.com/asj2017-3bileveloptnmf-170408002528/75/Asj2017-3-bileveloptnmf-3-2048.jpg)

![2段階最適化問題としての音源分離問題
• 従来研究 [Weninger et al., 2014]
– 仮定を設け,問題を緩和→厳密性を損なう
𝑭 = argmin
𝑭,𝑮
𝔇KL 𝒀 𝟏 𝑭 𝑮 , 𝑯 = argmin
𝑯,𝑼
𝔇KL 𝒀 𝟐 𝑯 𝑼
s. t. 𝑮, 𝑼 = argmin
𝑮,𝑼
𝔇KL 𝒀mix 𝑭 𝑮 + 𝑯 𝑼
上位目的関数
教師音𝒀 𝟏, 𝒀 𝟐から
教師基底𝑭, 𝑯をNMFで学習
下位制約関数
アクティベーション行列𝑮, 𝑼は
混合音𝒀mixをよく表現できる
𝑭 = argmin
𝑭,𝑮
𝔇KL 𝒀 𝟏 𝑭 𝑮 , 𝑯 = argmin
𝑯,𝑼
𝔇KL 𝒀 𝟐 𝑯 𝑼
s. t. 𝑮, 𝑼 = argmin
𝑮,𝑼
𝔇KL 𝒀mix 𝑭(∗)
𝑮 + 𝑯(∗)
𝑼
𝑭(∗) = argmin
𝑭, 𝑮
𝔇KL 𝒀 𝟏 𝑭 𝑮 , 𝑯(∗) = argmin
𝑯, 𝑼
𝔇KL 𝒀 𝟐 𝑯 𝑼
5/17
下位制約関数中の基底行列𝑭 ∗ , 𝑯(∗)を事前学習したものから動かさない](https://image.slidesharecdn.com/asj2017-3bileveloptnmf-170408002528/75/Asj2017-3-bileveloptnmf-5-2048.jpg)


![最適化問題の求解
• 罰金付きの目的関数を非負値制約の下で解かねばならない
– 通常のNMFのように補助関数法で解くことが困難
→ 乗算型の最急降下法[Fevotte et al., 2009]で解く
𝜕
𝜕𝐹Ω,𝐾
𝔇KL 𝒀 𝟏 𝑭𝑮 + 𝔇KL 𝒀 𝟐 𝑯𝑼 + 𝛼 𝐺 𝐶 𝐺 + 𝛼 𝑈 𝐶 𝑈
= 𝐺 𝐾,𝑡 −
𝑌1Ω,𝑡 𝐺 𝐾,𝑡
𝐹Ω,𝑘′ 𝐺 𝑘′,𝑡𝑘′
𝑡
+ ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ ⋯ 項別に展開、整理
= 𝐺 𝐾,𝑡
𝑡
+ ⋯ ⋯ ⋯ ⋯ −
𝑌1Ω,𝑡 𝐺 𝐾,𝑡
𝐹Ω,𝑘′ 𝐺 𝑘′,𝑡𝑘′
𝑡
+ ⋯ ⋯ ⋯ ⋯
正の項の和 負の項の和
= Δ𝑓+ − Δ𝑓−
最急降下法の式
𝐹Ω,𝐾 ← 𝐹Ω,𝐾 − 𝜂(Δ𝑓+
− Δ𝑓−
)
ステップ幅の設定
𝜂 =
𝐹Ω,𝐾
Δ𝑓+
乗算型最急降下法
𝐹Ω,𝐾 ← 𝐹Ω,𝐾 ×
Δ𝑓−
Δ𝑓+
非負制約を容易に解決
非負の更新係数
8/17](https://image.slidesharecdn.com/asj2017-3bileveloptnmf-170408002528/75/Asj2017-3-bileveloptnmf-8-2048.jpg)



![実データに対する実験
• 実験条件(分離時)
– テストデータとして2つの楽器音𝑦1
t
𝑡 , 𝑦2
t
𝑡 からなる曲
[Kitamura et al., 2014] 𝑦t 𝑡 = 𝑦1
t
𝑡 + 𝑦2
t
𝑡 を与え,そのスペ
クトログラム𝒀𝐭に対して個別教師音に対するNMFおよび提案手
法で推定した基底行列を用いてSNMFを行う.
– 10種類の初期値から計算を行い,平均SDRで分離度評価
15/17](https://image.slidesharecdn.com/asj2017-3bileveloptnmf-170408002528/75/Asj2017-3-bileveloptnmf-15-2048.jpg)
![実験結果
• 平均SDR [dB]
楽器の組
楽器1
SNMF
楽器1
Proposed
楽器2
SNMF
楽器2
Proposed
Fg & Fl 13.5 14.6 13.8 17.0
Fg & Hp 16.6 18.2 5.80 8.59
Fg & Hr 4.03 5.24 6.39 6.53
Fl & Hp 15.7 16.2 4.21 5.55
Fl & Hr 3.37 7.14 5.02 8.25
Hp & Hr 3.60 5.27 16.4 17.2
Average 9.48 11.1 8.61 10.5
• SNMFに比べ分離精度が大幅に改善された.
16/17](https://image.slidesharecdn.com/asj2017-3bileveloptnmf-170408002528/75/Asj2017-3-bileveloptnmf-16-2048.jpg)


































































