This document proposes a flexible microphone array system using informed source separation methods for a rescue robot. It aims to detect victim speech in disaster areas using multiple microphones on the robot's flexible body. The proposed method uses supervised rank-1 nonnegative matrix factorization (NMF) and statistical signal estimation to address two key problems: ego-noise basis mismatch due to the robot's self-vibrations, and speech model ambiguity. Experiments show the proposed approach outperforms conventional independent vector analysis and single-channel NMF, improving speech detection even with mismatched ego-noise recordings.
![Low-rank source spectrogram
5
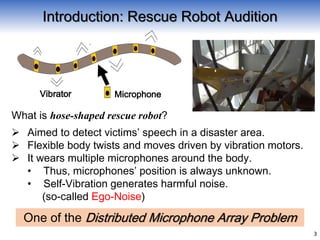
Rank-1 MNMF (Independent Low-Rank Matrix Analysis)
that separates the sources by estimating demixing matrix W
and low-rank source spectrogram model via Nonnegative
Matrix Factorization (NMF) [Lee, 2001].
Rank-1 MNMF [Kitamura, Saruwatari et al., IEEE Trans. ASLP 2016]
W
Demixing
matrix
Simultaneous
estimation for W
and TV
+
In this study, we focus our attention to…](https://image.slidesharecdn.com/ica2016-312saruwatari-170407221645/85/Ica2016-312-saruwatari-5-320.jpg)
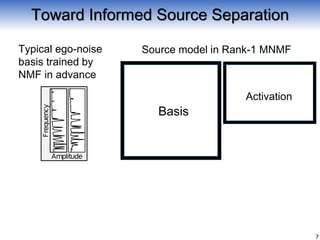
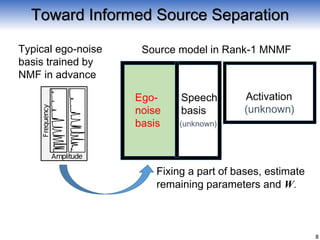
![Typical ego-noise
basis trained by
NMF in advance
Activation
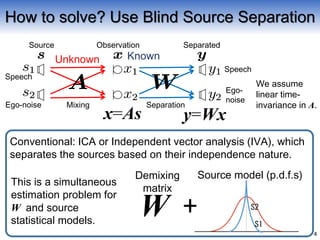
Source model in Rank-1 MNMF
Fixing a part of bases, estimate
remaining parameters and W.
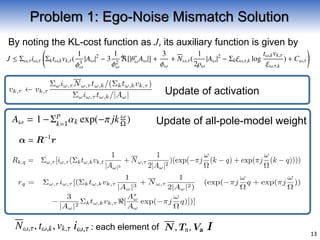
[Problem 1] Ego-noise time-variance (ego-noise mismatch problem)
[Problem 2] Unknown speech (speech model ambiguity problem)
9
Basis
Speech
basis
Ego-
noise
basis
Toward Informed Source Separation
(unknown)
(unknown)](https://image.slidesharecdn.com/ica2016-312saruwatari-170407221645/85/Ica2016-312-saruwatari-9-320.jpg)
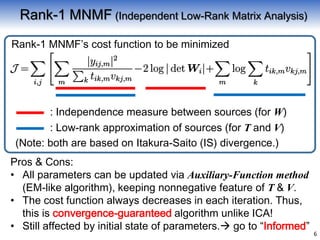
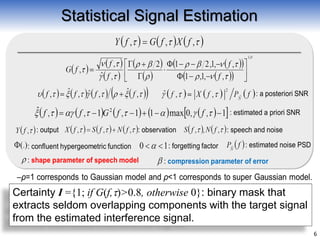
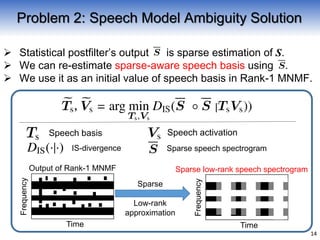
![Supervised Rank-1 MNMF
Rough separation
Statistical Postfilter [Breithaupt, 2010]
Chi distribution (sparse p.d.f.)
is used as target signal prior.
Its sparseness can be estimted
from data empirically via
higher-order statistics
[Murota, Saruwatari, ICASSP2014].
Observed
signal
Thanks to sparse prior, we can
obtain more accurate separation
and its Certainty.
Statistical Signal Estimation
Certainty
Estimated ego-noise
Sparse p.d.f.
6
Estimated target signal](https://image.slidesharecdn.com/ica2016-312saruwatari-170407221645/85/Ica2016-312-saruwatari-10-320.jpg)
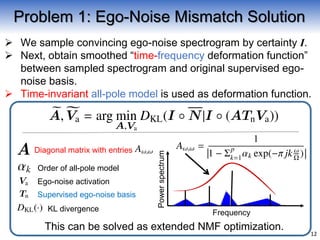
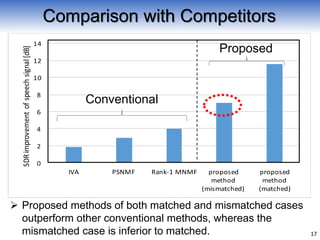
![16
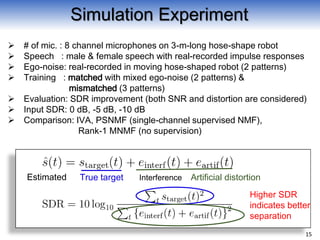
Example of Typical SDR Improvement
Supervised
Rank-1
MNMF
Statistical
postfilter
(1)
(2)
(3)
(4)
Combination of each processing is effective.
SDRImprovement[dB]
Step(1) Step(2) Step(3) Step(4)
SDR increases through
each processing step
Before basis defom.
and initialization
Basis
deform.
and
Initialization
After basis defom.
and initialization](https://image.slidesharecdn.com/ica2016-312saruwatari-170407221645/85/Ica2016-312-saruwatari-16-320.jpg)