Download to read offline

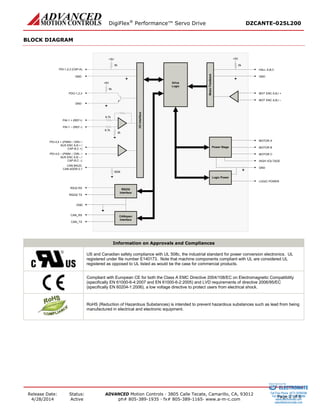






The DigiFlex® PerformanceTM Servo Drive DZCANTE-025L200 is a fully digital servo drive designed to control brushed and brushless servomotors. It operates in torque, velocity, or position mode using space vector modulation for higher efficiency. The drive features programmable digital and analog inputs and outputs, and supports various feedback and command sources. It communicates using CANopen and has a peak current of 25A and continuous current of 12.5A, with agency approvals including CE, cUL, and RoHS compliance.











































































































