Download as PDF, PPTX
![15
How does this relate the Ke (BEMF Constant) ?
They are proportional.
Ke = Volts
_________________________________________________________________________________________________
Unit of Rotational Speed – RPM [or Rad/sec]
Example: V / 1000 RPM
FYI - If working in SI units, these numbers are
identical, Kt in Nm/A = Ke in V-sec / rad
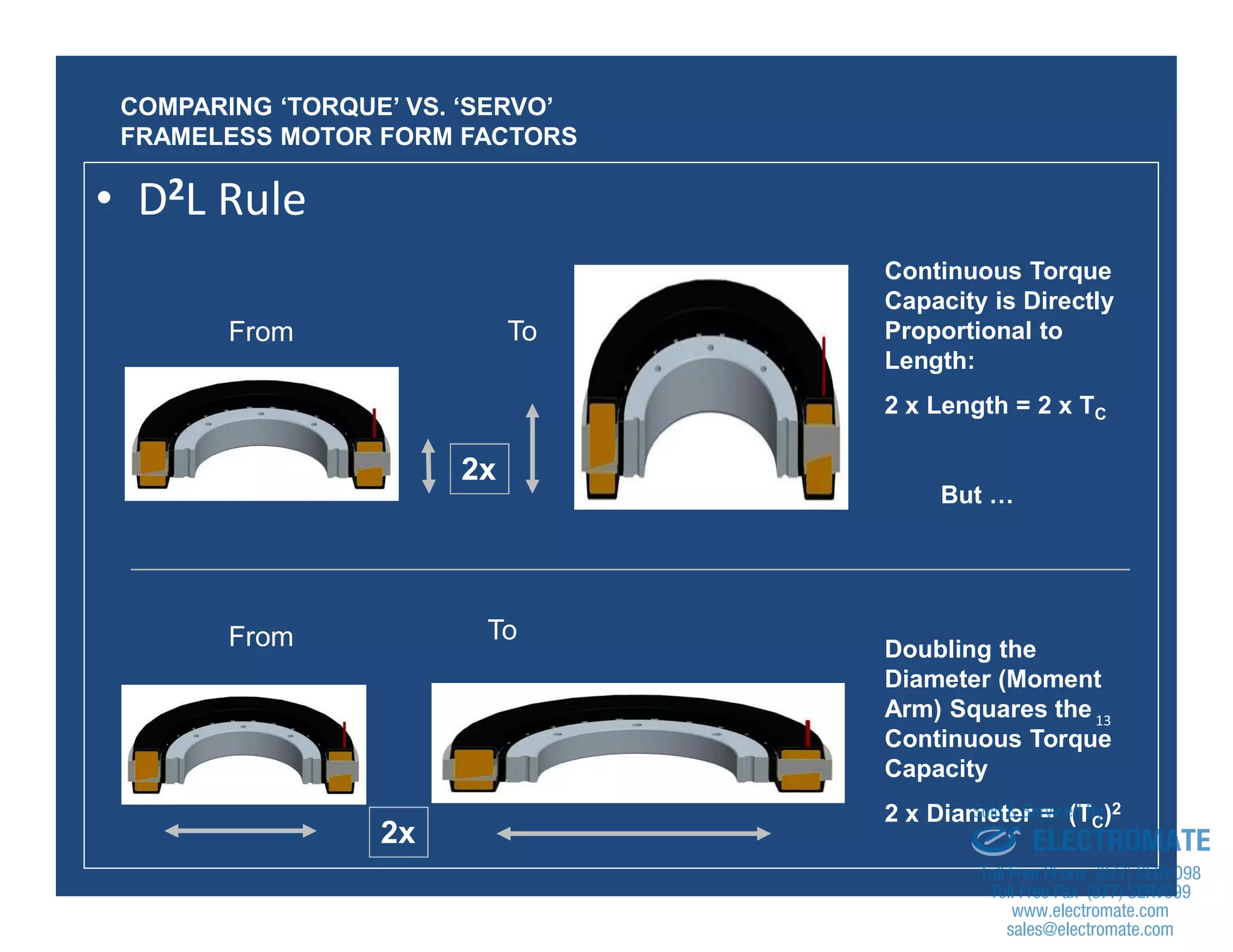
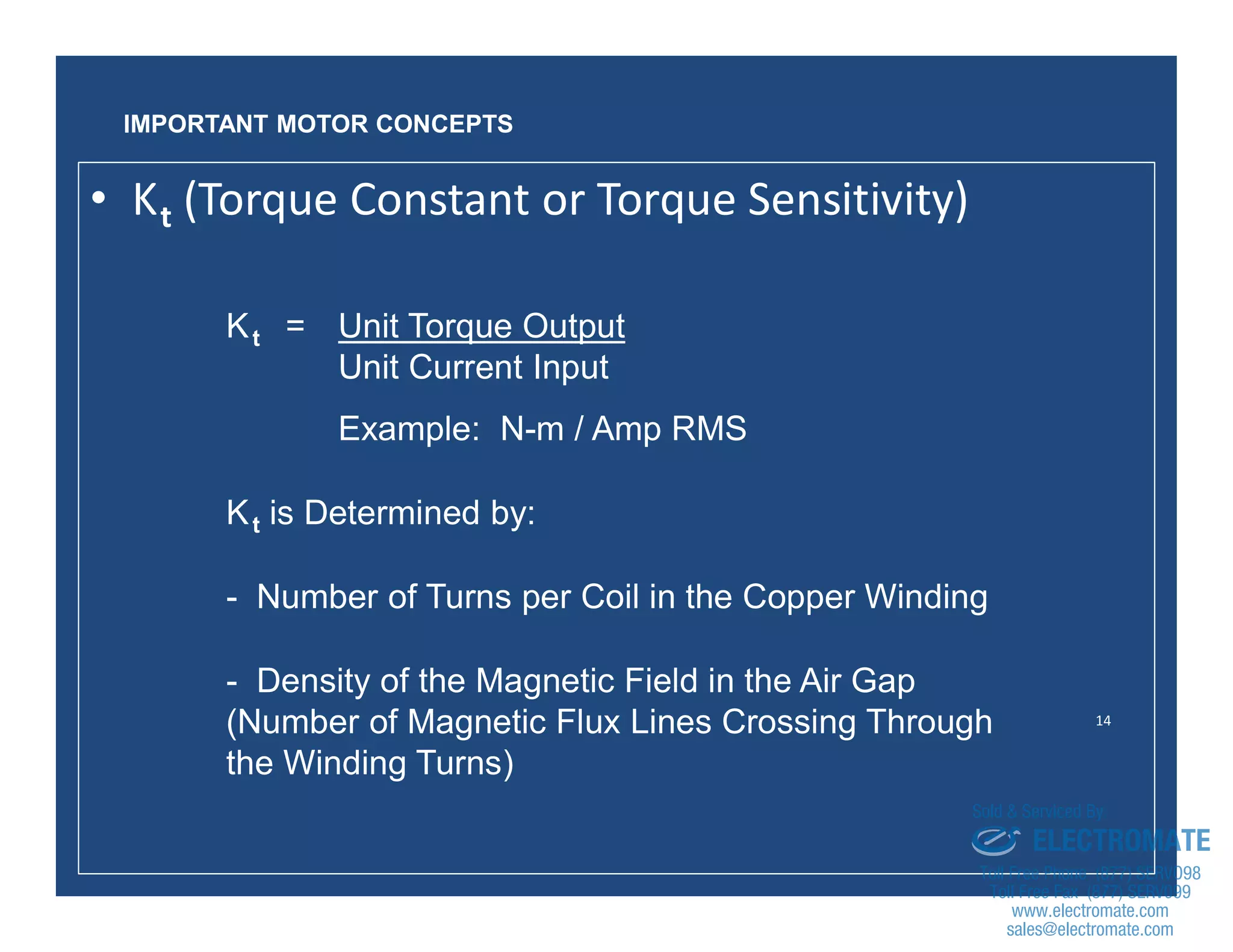
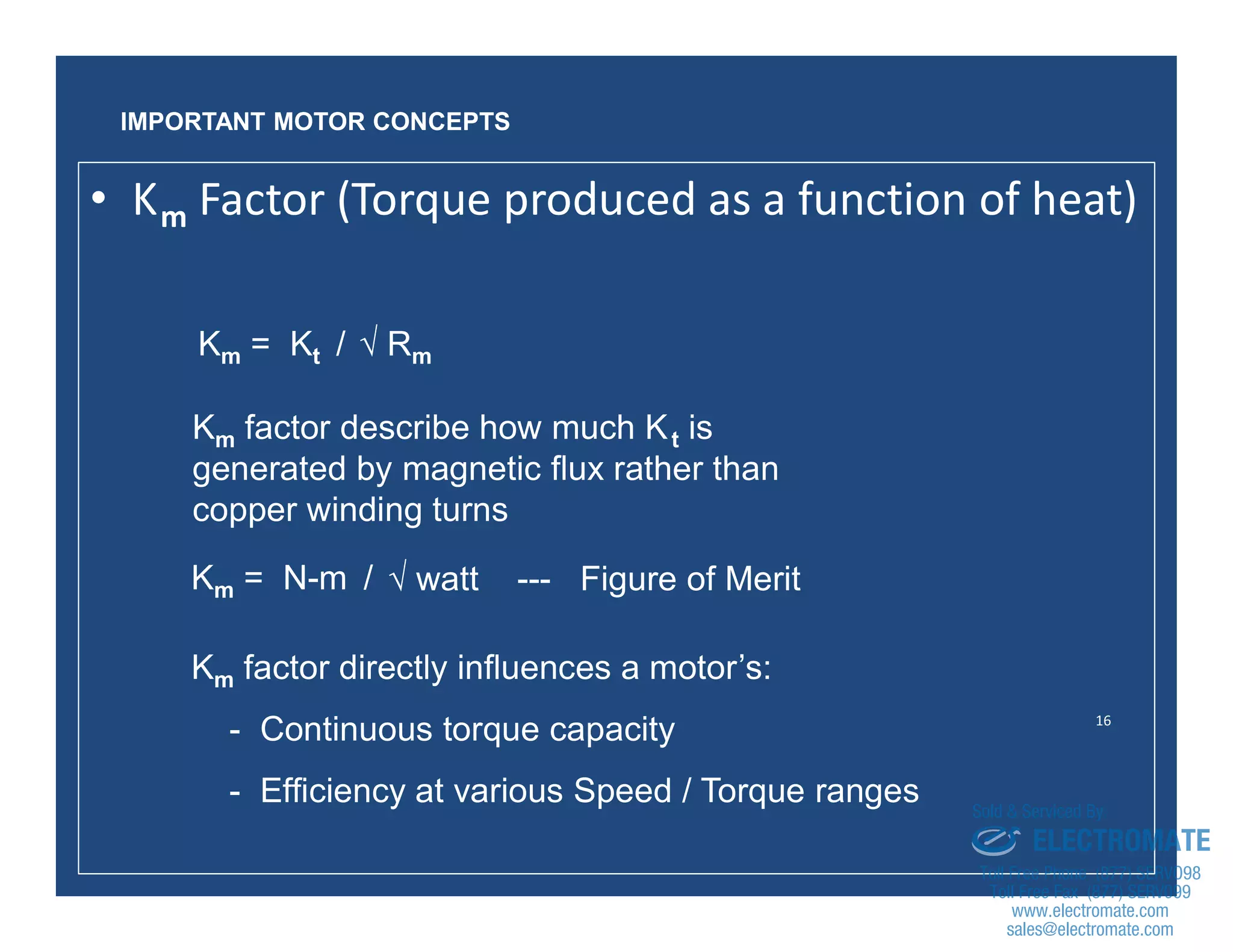
IMPORTANT MOTOR CONCEPTS
• Kt (Torque Constant or Torque Sensitivity)
sales@electromate.com
www.electromate.com
ELECTROMATE
Toll Free Phone (877) SERVO98
Toll Free Fax (877) SERV099
www.electromate.com
sales@electromate.com
Sold & Serviced By:](https://image.slidesharecdn.com/kollmorgen-roboticsymposiumpresentation-motordesignimpactsontheoptimizationofroboticsystems-180403190144/75/Kollmorgen-robotic-symposium-presentation-motor-design-impacts-on-the-optimization-of-robotic-systems-15-2048.jpg)
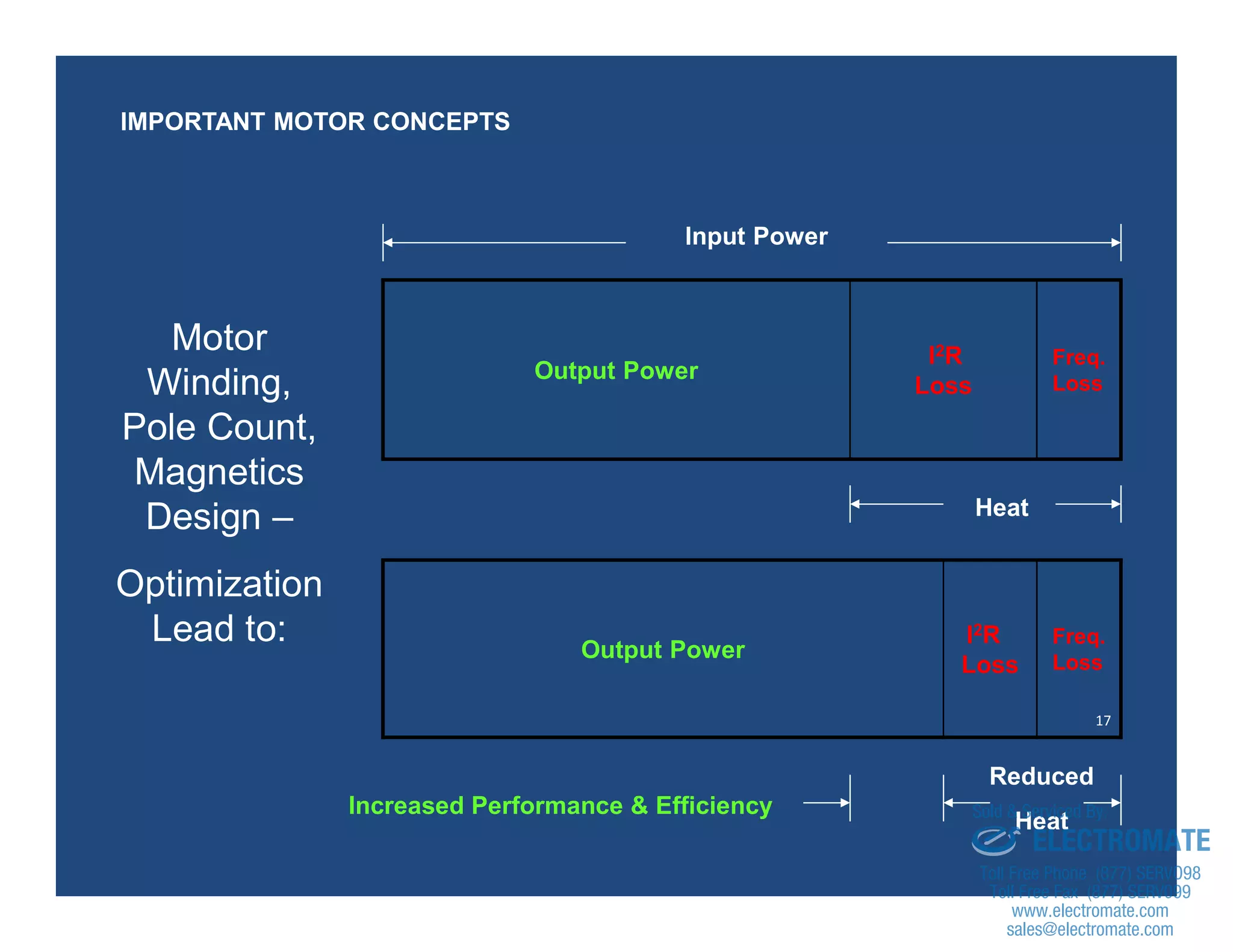




![37
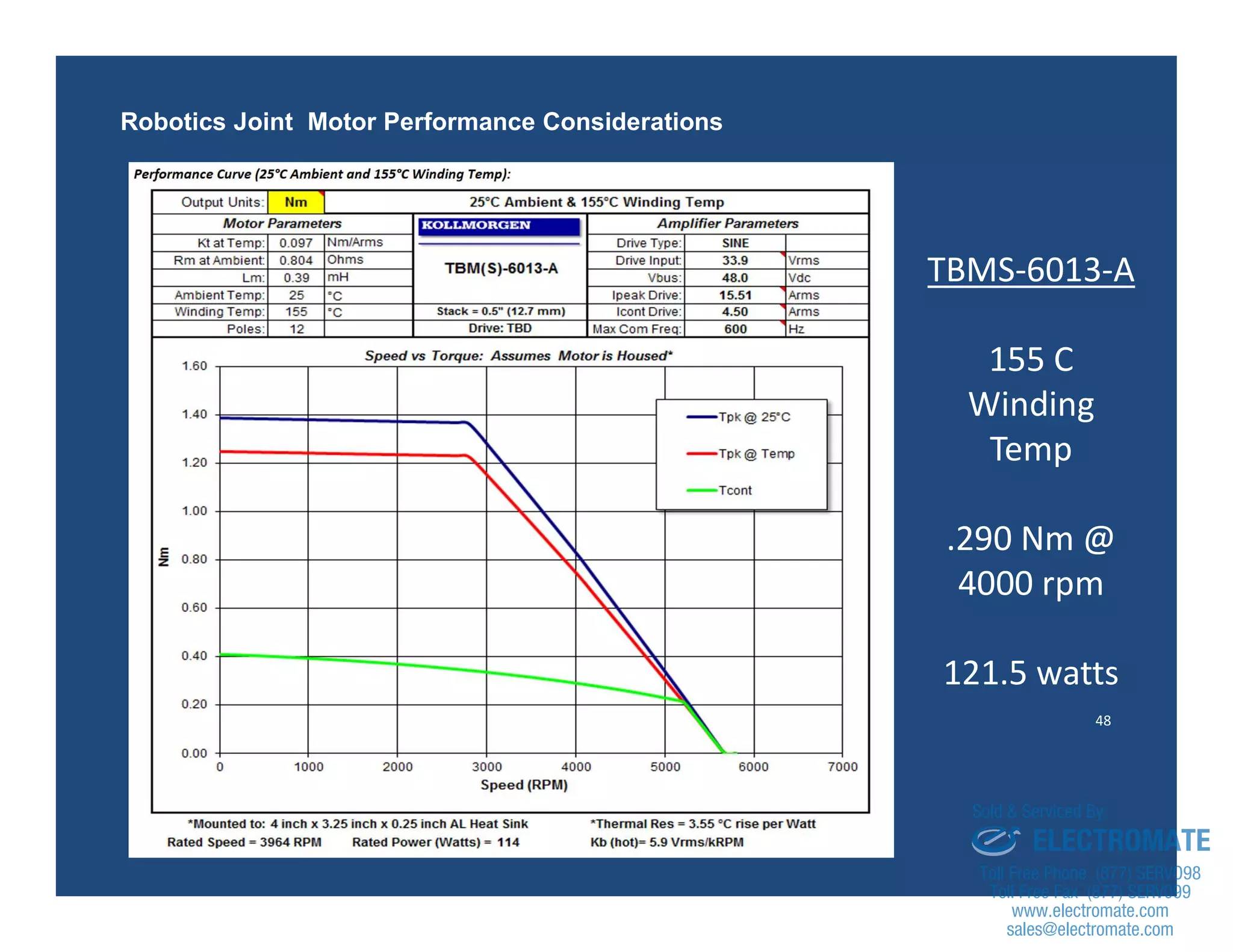
• Typical Motor with Class F insulation system
has 155 C max winding temperature
• 155 C equates to nominal 140 C in close
proximity to encoder / gearing design elements
• Solutions:
Increase thermal heat sink mass
Increase distance to encoder / gearing [longer thermal
path = increased weight]
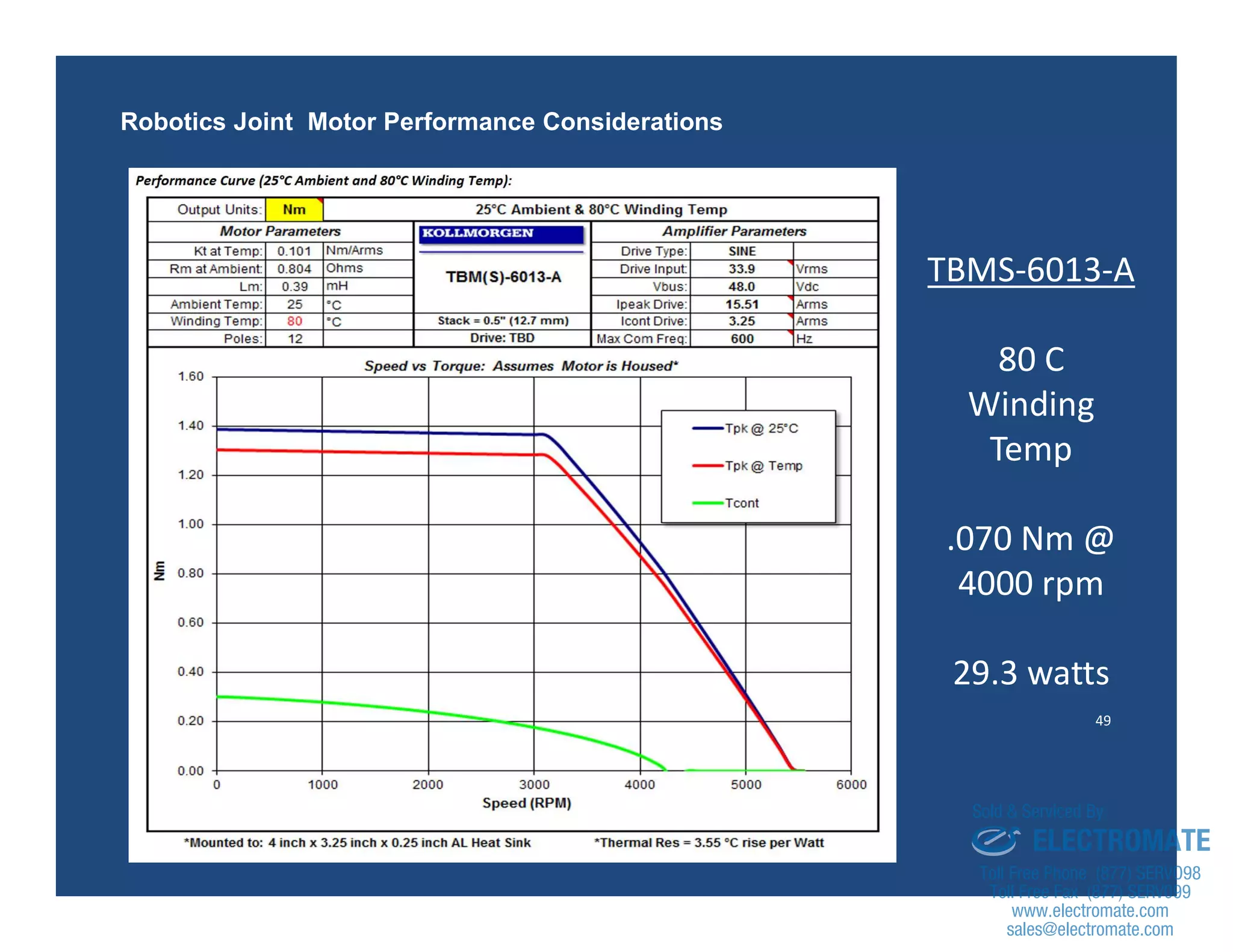
Reduce maximum winding temperatures
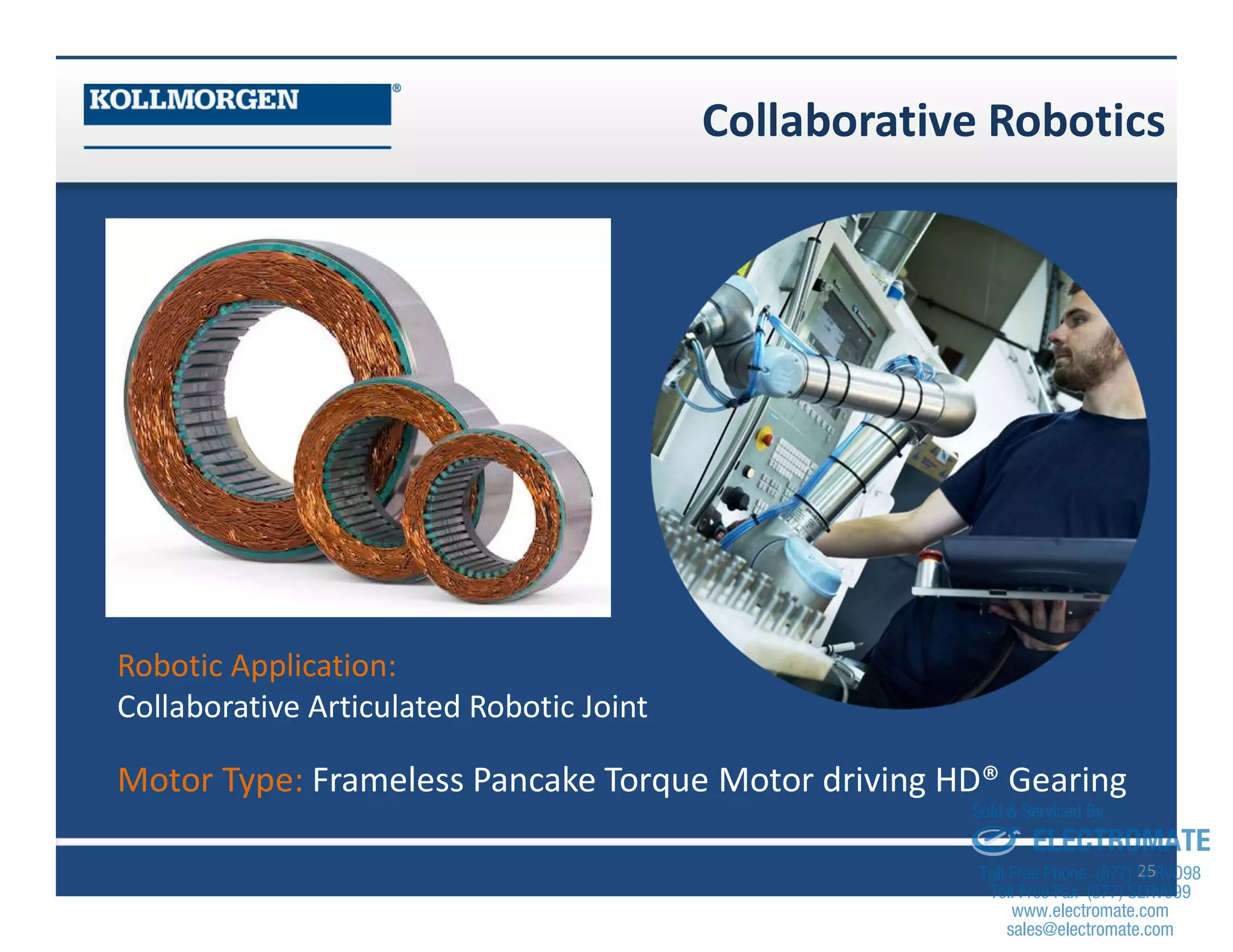
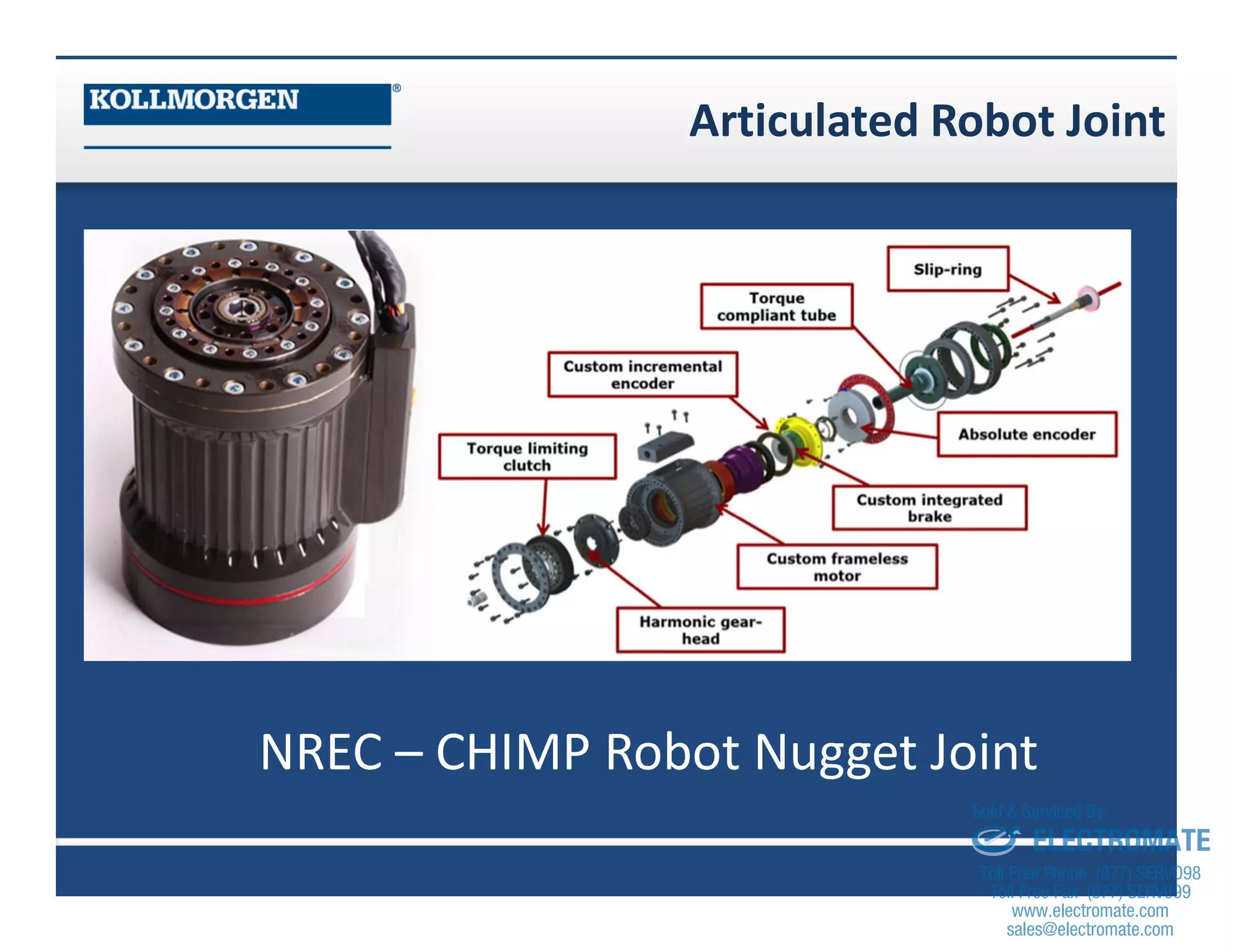
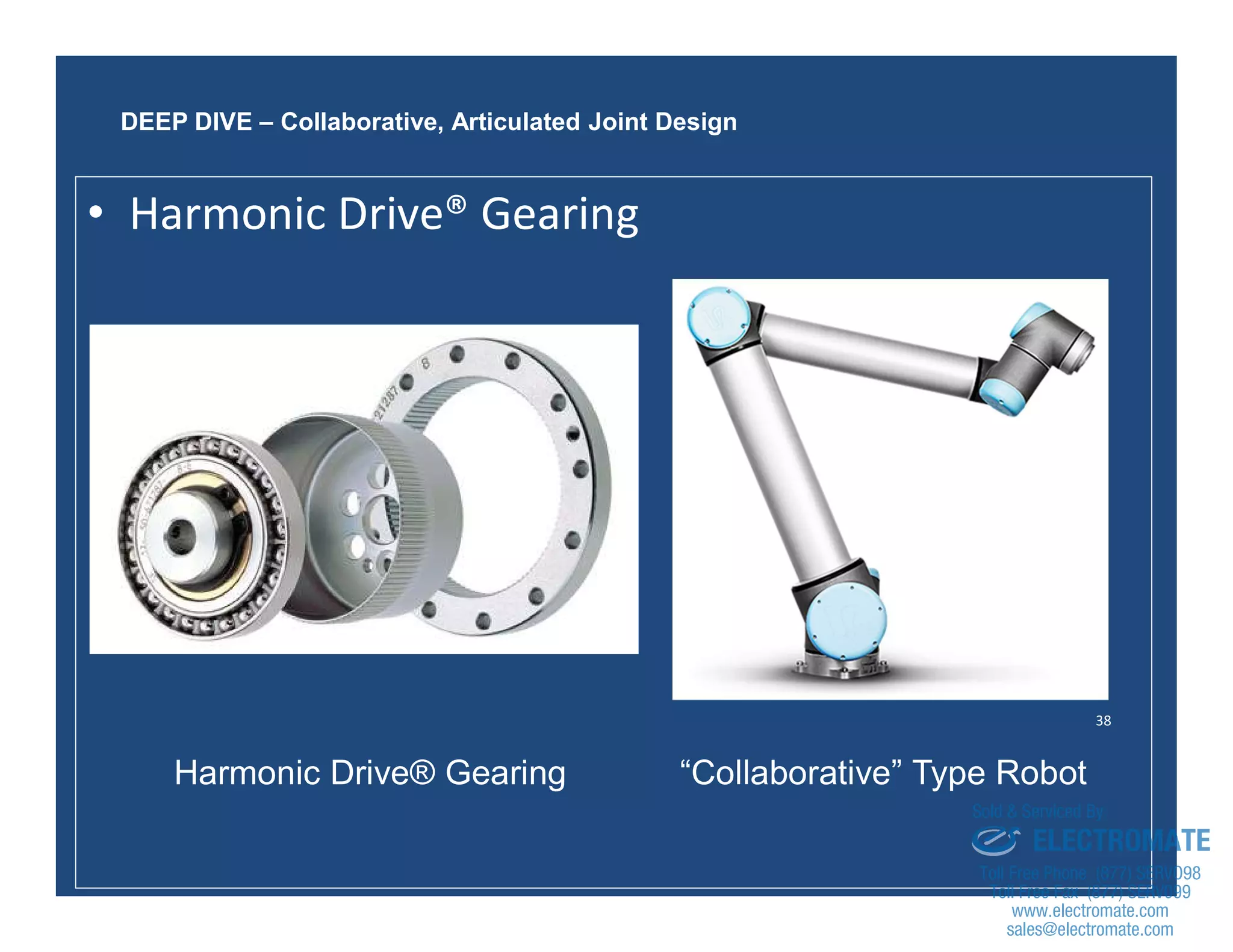
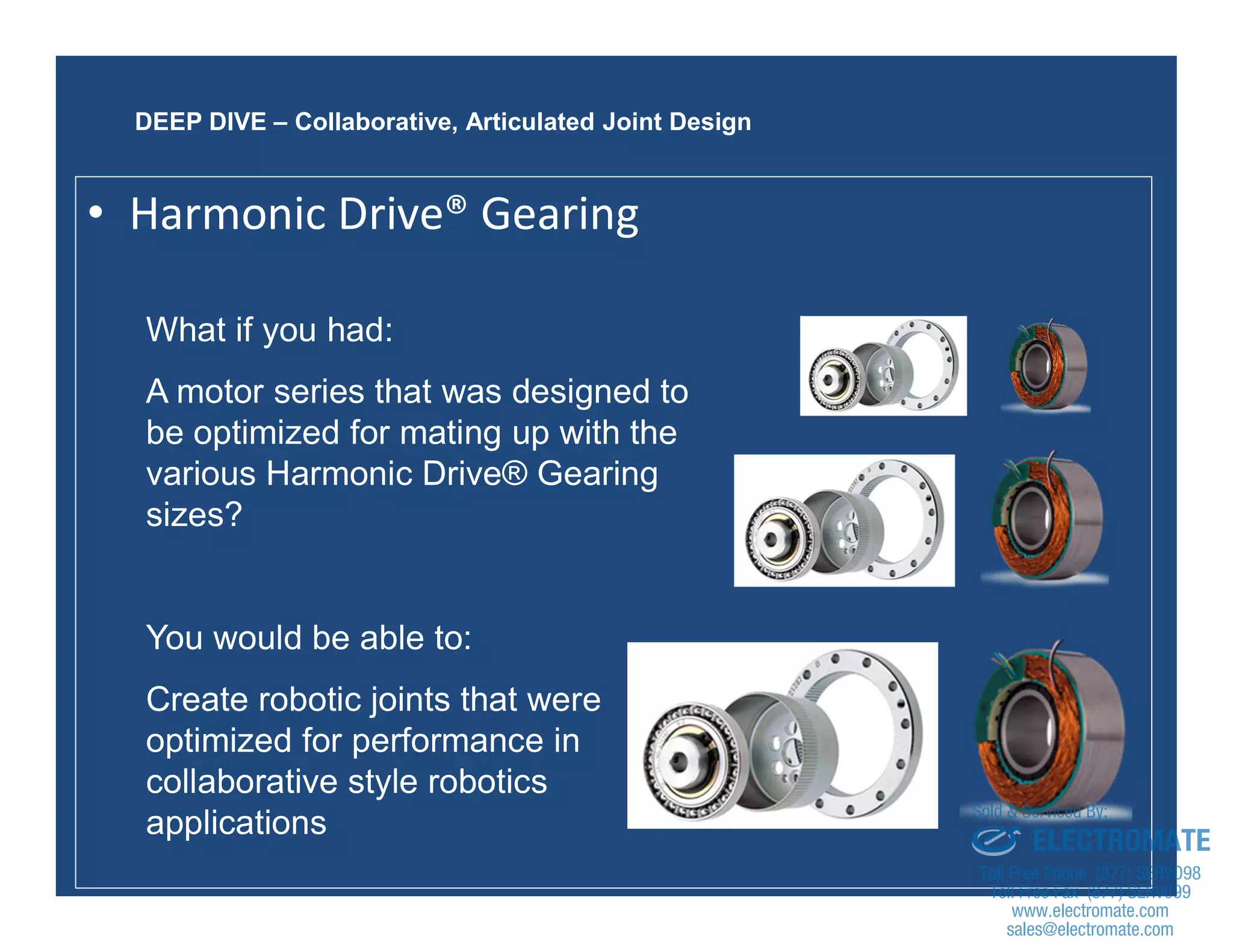
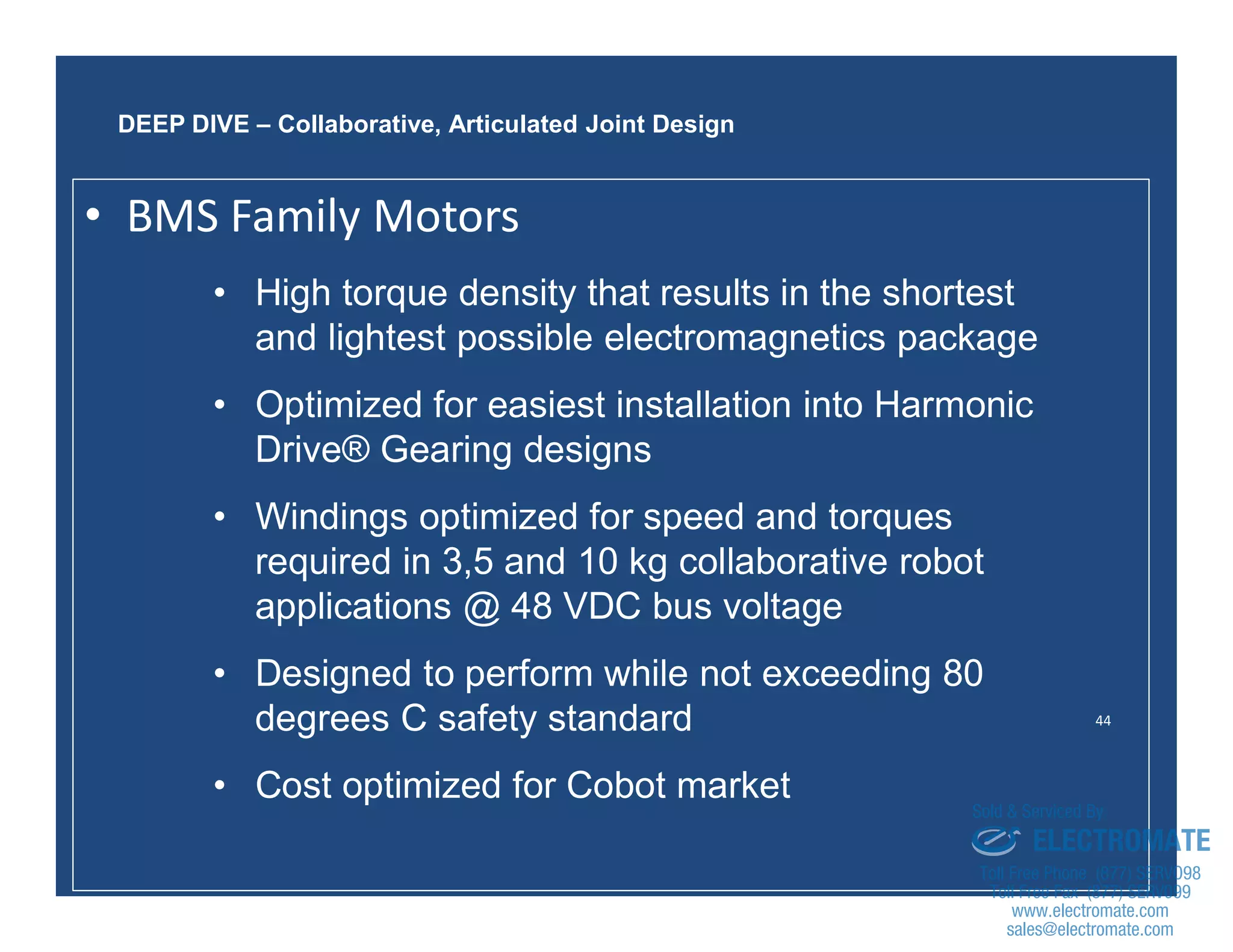
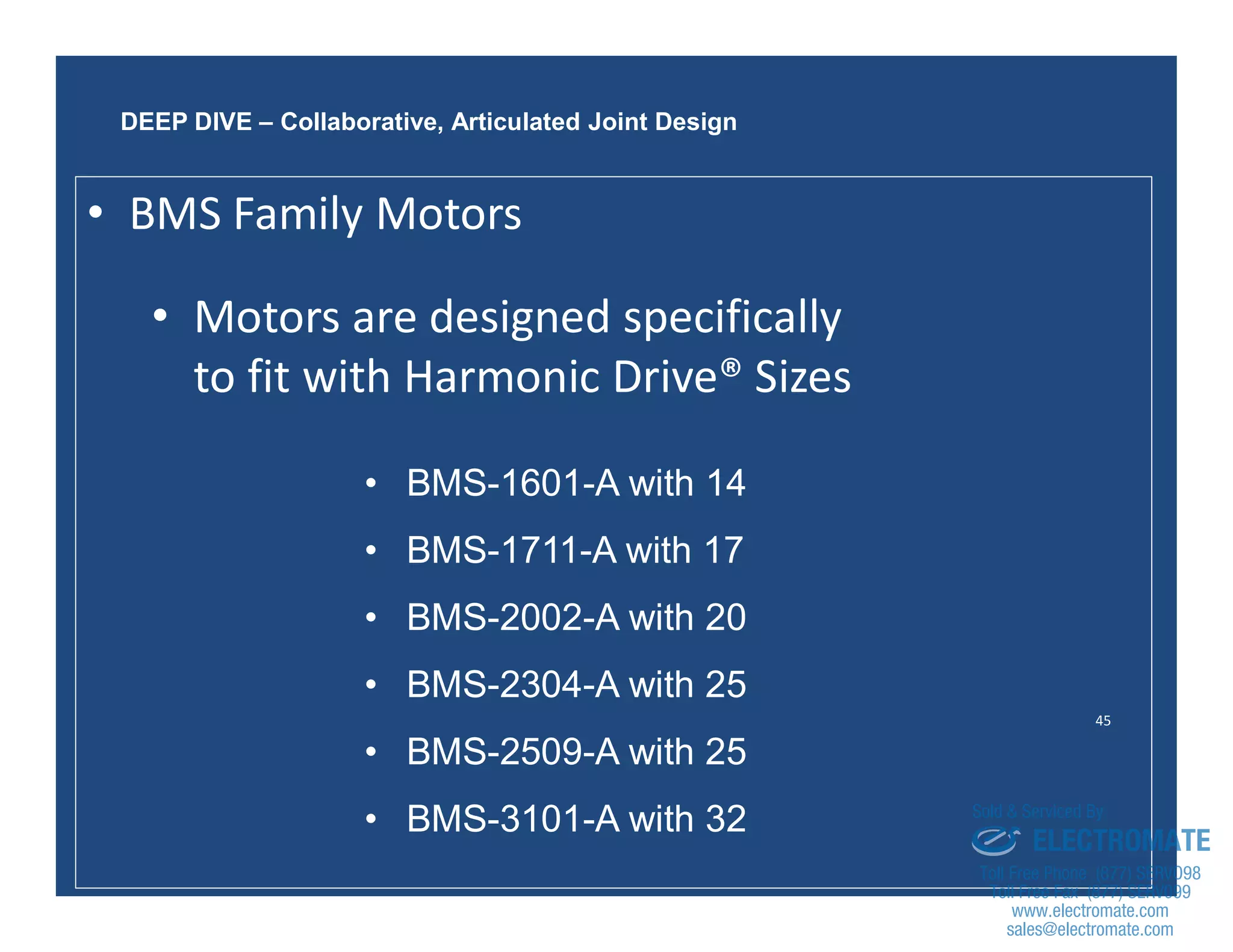
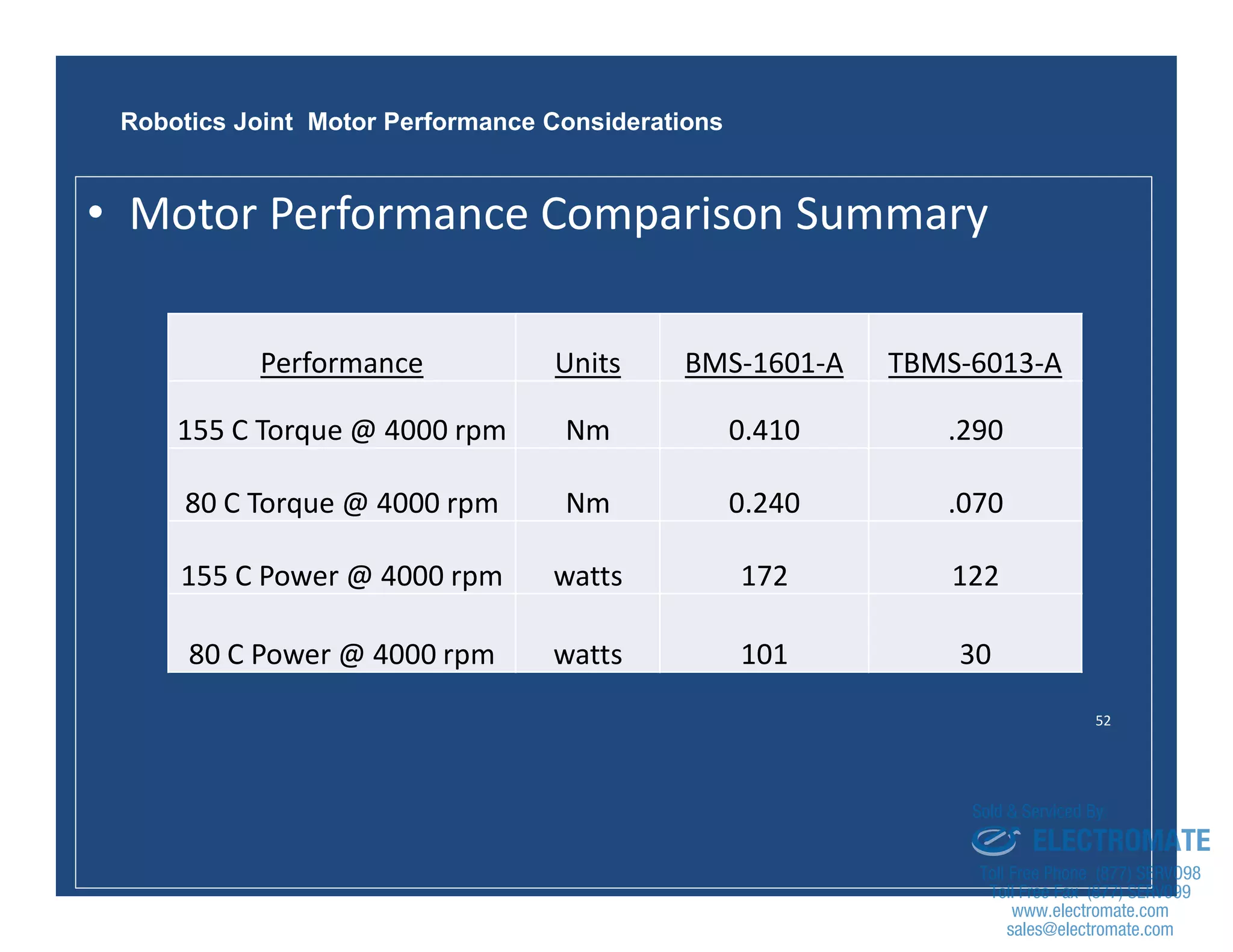
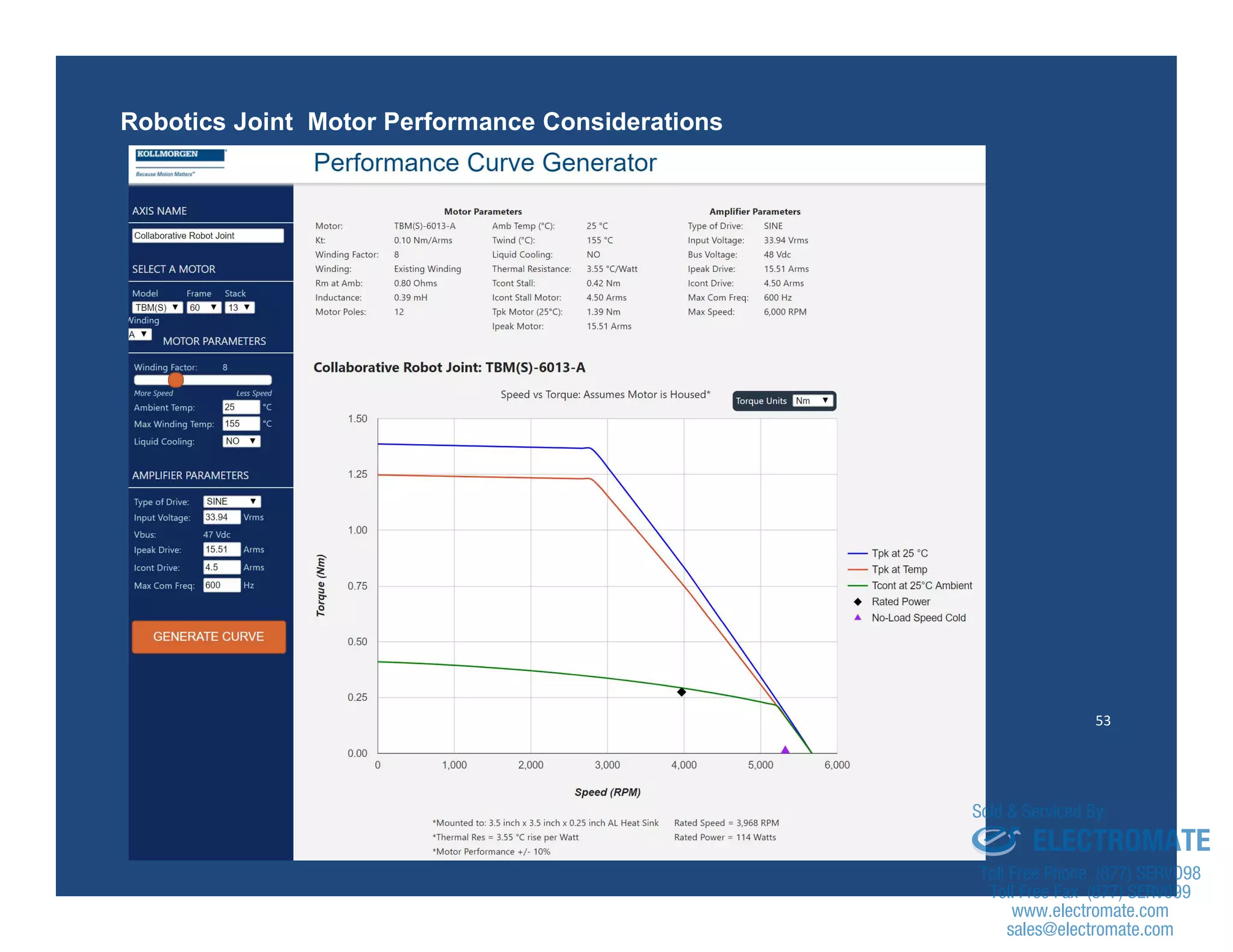
DEEP DIVE – Collaborative, Articulated Joint Design
• Joint Design Considerations
sales@electromate.com
www.electromate.com
ELECTROMATE
Toll Free Phone (877) SERVO98
Toll Free Fax (877) SERV099
www.electromate.com
sales@electromate.com
Sold & Serviced By:](https://image.slidesharecdn.com/kollmorgen-roboticsymposiumpresentation-motordesignimpactsontheoptimizationofroboticsystems-180403190144/75/Kollmorgen-robotic-symposium-presentation-motor-design-impacts-on-the-optimization-of-robotic-systems-37-2048.jpg)


The document discusses how motor design impacts the optimization of robotic systems. It explains that frameless motors can enable smaller, lighter and faster robots through their direct drive capabilities and high torque density. The document also covers various motor topologies and important concepts like torque constant, motor size constant, and how they relate to continuous torque capacity, efficiency and losses. Application examples discussed include collaborative robots, surgical robots, and mobile robots.



































































