Download to read offline
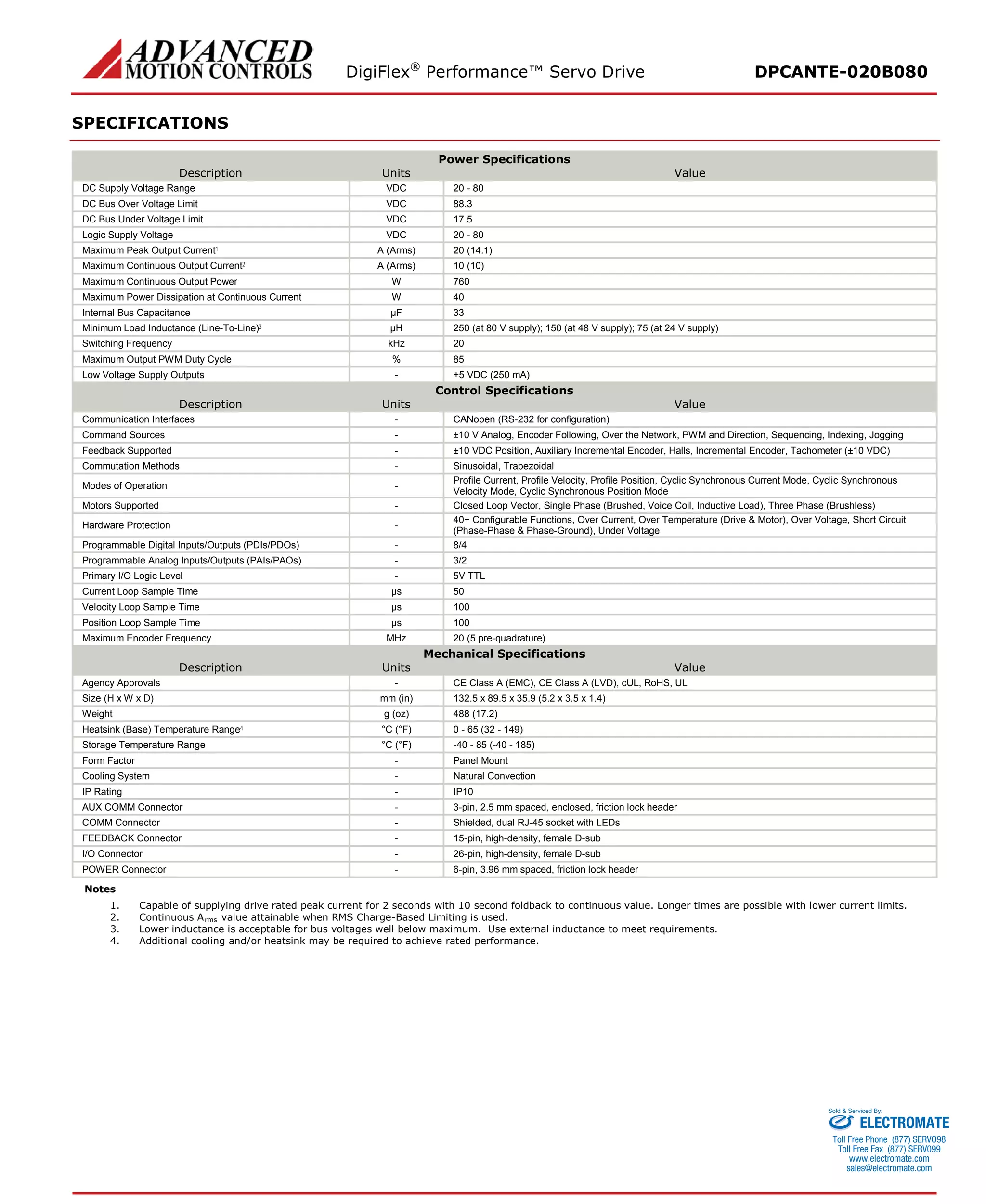
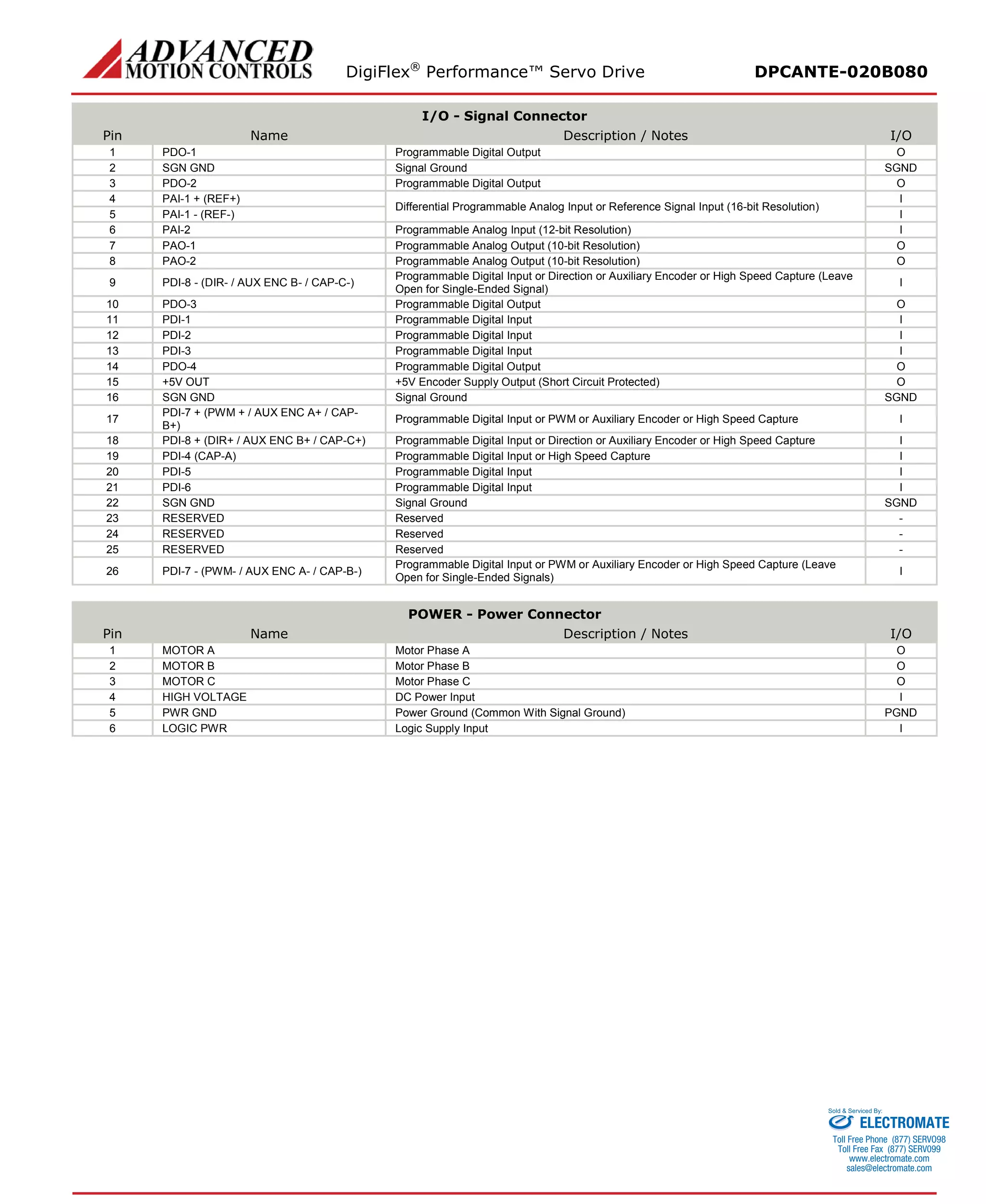
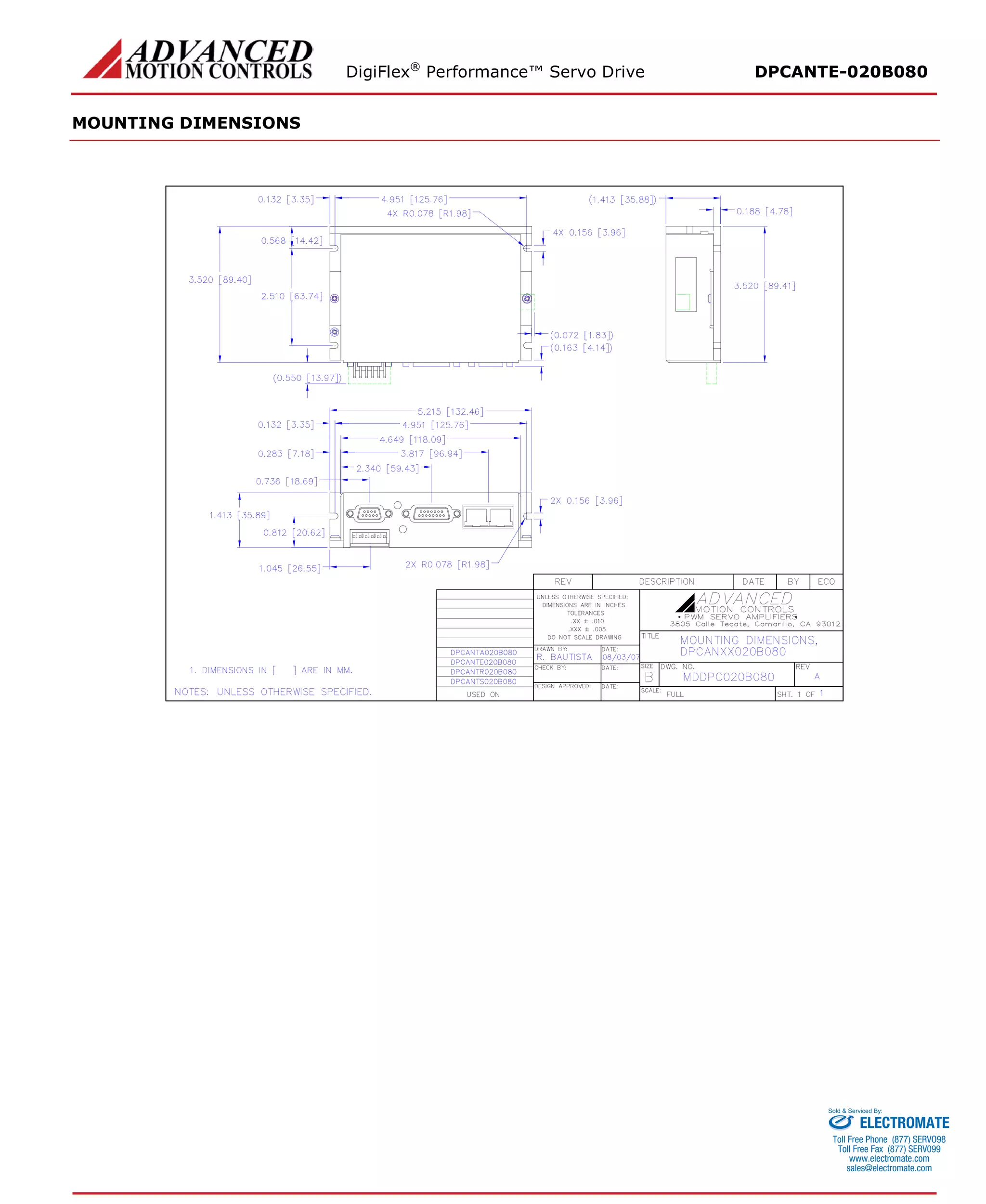

The DigiFlex® PerformanceTM Servo Drive is a fully digital servo drive designed to drive brushed and brushless motors in torque, velocity, or position mode. It uses Space Vector Modulation for high efficiency and features CANopen and RS-232 interfaces, programmable I/O, and integrated safety certifications. The drive provides 20A peak current, operates from 20-80VDC, and measures 132.5 x 89.5 x 35.9 mm.























































































![Coded Agents – with UiPath SDK + LangGraph [Virtual Hands-on Workshop]](https://cdn.slidesharecdn.com/ss_thumbnails/codedagentsdeck-251215155422-5497c599-thumbnail.jpg?width=640&height=640&fit=bounds)















