Download to read offline

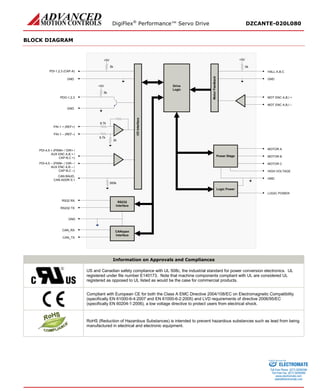


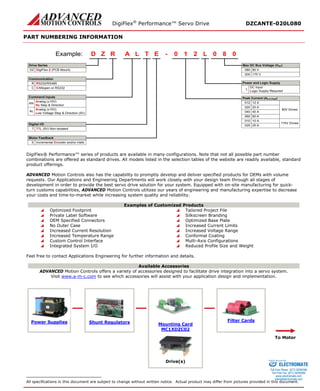

The DigiFlex® PerformanceTM Servo Drive DZCANTE-020L080 is a fully digital servo drive designed to drive brushed and brushless servomotors. It operates in torque, velocity, or position mode using space vector modulation for higher efficiency. The drive supports various command and feedback interfaces, and includes programmable digital and analog inputs/outputs. It is compliant with various safety standards and has a compact form factor making it suitable for embedded applications.


































































































