Download to read offline

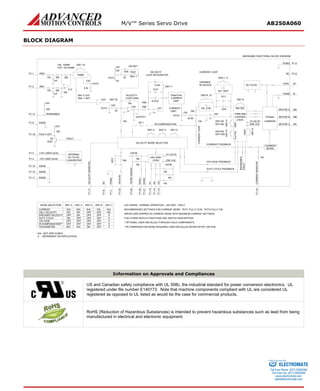






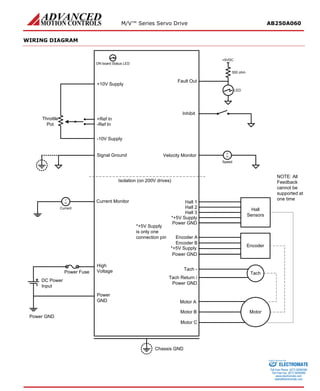



This servo drive amplifier can provide up to 250A of peak current and 150A of continuous current. It is designed to drive brushless DC motors and interface with digital controllers. It has protection against overheating, overcurrent and other faults. Operating modes include current control, velocity control using encoders or Hall sensors, and it can drive brushed or brushless motors.







































































































