



![7
Dr. T.D. Shashikala Associate Professor Department of E&CE. University BDT College of
Engineering
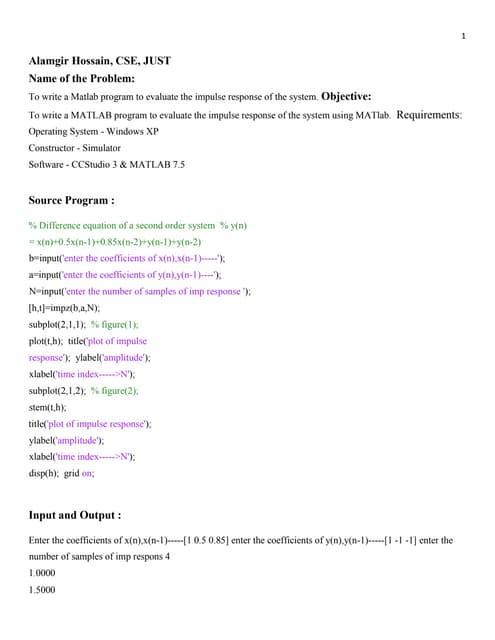
subplot(3, 2, 4);
plot(t_scale, x_scale, 'LineWidth', 2);
xlabel('Time');
ylabel('Amplitude');
title('Scaled Signal (a * t)');
% d) Combined operations: Multiplication, Folding, and Scaling
x_combined = k * fliplr(a * x); % Multiplication, folding, and scaling
% Plot the combined signal
subplot(3, 2, [5, 6]);
plot(t_fold, x_combined, 'LineWidth', 2);
xlabel('Time');
ylabel('Amplitude');
title('Combined Operation (k * x(-at))');
OUTPUT
This script performs the same operations as before, including multiplication with a constant,
folding, scaling, and a combination of these operations, without using functions. Each
operation is illustrated in a separate subplot](https://image.slidesharecdn.com/adsplabcompletemanual-240712071556-e8e2ecbb/85/Adv-Digital-Signal-Processing-LAB-MANUAL-pdf-7-320.jpg)
![9
Dr. T.D. Shashikala Associate Professor Department of E&CE. University BDT College of
Engineering
3. Find out the DFT and IDFT of a given sequence without using inbuilt
instructions
clc;clear all;close all;
% Define the sequence
x = [1, 2, 3, 4]; % Example sequence
% DFT Calculation
N = length(x);
X = zeros(1, N);
for k = 1:N
for n = 1:N
X(k) = X(k) + x(n) * exp(-1i*2*pi*(k-1)*(n-1)/N);
end
end
% IDFT Calculation
x_reconstructed = zeros(1, N);
for n = 1:N
for k = 1:N
x_reconstructed(n) = x_reconstructed(n) + (1/N) * X(k) *
exp(1i*2*pi*(k-1)*(n-1)/N);
end
end
% Display results
disp('DFT:');
disp(X);
disp('IDFT:');
disp(x_reconstructed);
OUTPUT
In this code:
x is the input sequence.
N is the length of the sequence.
X is the DFT of the sequence x.
x_reconstructed is the reconstructed sequence after applying the IDFT.
You can replace the example sequence x with any sequence you want to
compute the DFT and IDFT for.](https://image.slidesharecdn.com/adsplabcompletemanual-240712071556-e8e2ecbb/85/Adv-Digital-Signal-Processing-LAB-MANUAL-pdf-9-320.jpg)
![10
Dr. T.D. Shashikala Associate Professor Department of E&CE. University BDT College of
Engineering
Make sure to understand the mathematical formulas behind the DFT and IDFT
algorithms to implement them correctly.
DFT:
10.0000 + 0.0000i -2.0000 + 2.0000i -2.0000 - 0.0000i -2.0000 -
2.0000i
IDFT:
1.0000 - 0.0000i 2.0000 - 0.0000i 3.0000 - 0.0000i 4.0000 +
0.0000i
Alternate Method
% Define the sequence
x = [1, 2, 3, 4]; % Example sequence
% DFT Calculation
N = length(x);
X = zeros(1, N);
for k = 1:N
for n = 1:N
X(k) = X(k) + x(n) * exp(-1i*2*pi*(k-1)*(n-1)/N);
end
end
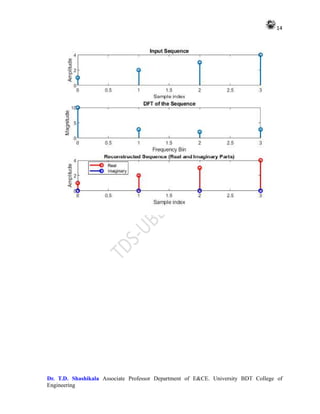
% Plotting
subplot(2, 1, 1);
stem(0:N-1, x, 'LineWidth', 2);
xlabel('Sample index');
ylabel('Amplitude');
title('Input Sequence');
subplot(2, 1, 2);
stem(0:N-1, abs(X), 'LineWidth', 2);
xlabel('Frequency Bin');
ylabel('Magnitude');
title('DFT of the Sequence');
OUTPUT 2](https://image.slidesharecdn.com/adsplabcompletemanual-240712071556-e8e2ecbb/85/Adv-Digital-Signal-Processing-LAB-MANUAL-pdf-10-320.jpg)

![12
Dr. T.D. Shashikala Associate Professor Department of E&CE. University BDT College of
Engineering
ALTERNATE METHOD
clc; close all; clear all;
% Define the sequence
x = [1, 2, 3, 4]; % Example sequence
% DFT Calculation
N = length(x);
X = zeros(1, N);
for k = 1:N
for n = 1:N
X(k) = X(k) + x(n) * exp(-1i*2*pi*(k-1)*(n-1)/N);
end
end
% IDFT Calculation
x_reconstructed = zeros(1, N);
for n = 1:N
for k = 1:N
x_reconstructed(n) = x_reconstructed(n) + (1/N) * X(k) *
exp(1i*2*pi*(k-1)*(n-1)/N);
end
end](https://image.slidesharecdn.com/adsplabcompletemanual-240712071556-e8e2ecbb/85/Adv-Digital-Signal-Processing-LAB-MANUAL-pdf-12-320.jpg)

![15
Dr. T.D. Shashikala Associate Professor Department of E&CE. University BDT College of
Engineering
4. Interpolation & decimation of a given sequence
clc; close all; clear all;
% Define the original sequence
x = [1, 2, 3, 4, 5, 6, 7, 8]; % Example sequence
% Interpolation
L = 3; % Interpolation factor
x_interp = zeros(1, length(x) * L);
x_interp(1:L:end) = x; % Insert zeros in between
x_interp = interp(x_interp, L); % Interpolation using built-in interp
function
% Decimation
M = 2; % Decimation factor
x_decimated = x(1:M:end); % Select every Mth sample
% Plotting
subplot(3, 1, 1);
stem(0:length(x)-1, x, 'LineWidth', 2);
xlabel('Sample index');
ylabel('Amplitude');
title('Original Sequence');
subplot(3, 1, 2);
stem(0:length(x_interp)-1, x_interp, 'LineWidth', 2);
xlabel('Sample index');
ylabel('Amplitude');
title('Interpolated Sequence (L = 3)');
subplot(3, 1, 3);
stem(0:length(x_decimated)-1, x_decimated, 'LineWidth', 2);
xlabel('Sample index');
ylabel('Amplitude');
title('Decimated Sequence (M = 2)');
OUTPUT
This MATLAB program defines an original sequence x, performs
interpolation with a factor L of 3, and decimation with a factor M of 2. It](https://image.slidesharecdn.com/adsplabcompletemanual-240712071556-e8e2ecbb/85/Adv-Digital-Signal-Processing-LAB-MANUAL-pdf-15-320.jpg)

![17
Dr. T.D. Shashikala Associate Professor Department of E&CE. University BDT College of
Engineering
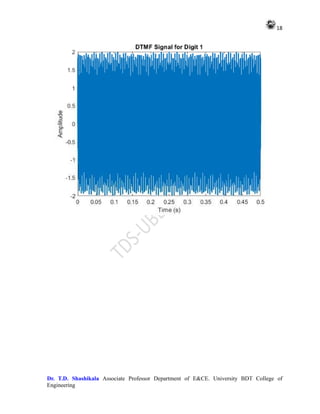
5. Generation of DTMF (Dual Tone Multiple Frequency) signals
clc; close all;clear all;
% Define the digit for which DTMF signal will be generated
digit = 1; % Example digit
% Define the frequencies corresponding to each DTMF digit
dtmf_freqs = [697, 770, 852, 941; % Row frequencies
1209, 1336, 1477, 1633]; % Column frequencies
% Define the time axis
fs = 8000; % Sampling frequency
duration = 0.5; % Duration of each tone in seconds
t = 0:1/fs:duration;
% Generate DTMF signal for the input digit
row_idx = ceil(digit/4); % Row index
col_idx = mod(digit-1, 4) + 1; % Column index
tone1 = sin(2*pi*dtmf_freqs(1, row_idx)*t); % Row tone
tone2 = sin(2*pi*dtmf_freqs(2, col_idx)*t); % Column tone
dtmf_signal = tone1 + tone2; % Combined DTMF signal
% Plot the DTMF signal
figure;
plot(t, dtmf_signal, 'LineWidth', 2);
xlabel('Time (s)');
ylabel('Amplitude');
title(['DTMF Signal for Digit ', num2str(digit)]);
OUTPUT
This code generates a DTMF signal for the specified digit, plots it, and displays the
corresponding DTMF signal. You can change the value of digit to generate DTMF signals for
different digits. Adjust the sampling frequency, duration, and other parameters as needed.](https://image.slidesharecdn.com/adsplabcompletemanual-240712071556-e8e2ecbb/85/Adv-Digital-Signal-Processing-LAB-MANUAL-pdf-17-320.jpg)
![19
Dr. T.D. Shashikala Associate Professor Department of E&CE. University BDT College of
Engineering
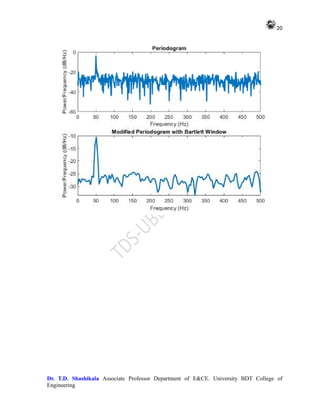
6. Estimate the PSD of a noisy signal using periodogram and modified
periodogram
% Generate a noisy signal
fs = 1000; % Sampling frequency
t = 0:1/fs:1-1/fs; % Time vector
x = cos(2*pi*50*t) + randn(size(t)); % Noisy signal with sinusoidal component
% Compute the periodogram
[Pxx, f] = periodogram(x, [], [], fs);
% Compute the modified periodogram with Bartlett window
[Pxx_bartlett, f_bartlett] = pwelch(x, [], [], [], fs);
% Plot the PSD estimates
figure;
subplot(2, 1, 1);
plot(f, 10*log10(Pxx), 'LineWidth', 2);
xlabel('Frequency (Hz)');
ylabel('Power/Frequency (dB/Hz)');
title('Periodogram');
subplot(2, 1, 2);
plot(f_bartlett, 10*log10(Pxx_bartlett), 'LineWidth', 2);
xlabel('Frequency (Hz)');
ylabel('Power/Frequency (dB/Hz)');
title('Modified Periodogram with Bartlett Window');
OUTPUT
In this code:
We generate a noisy signal x containing a sinusoidal component and add Gaussian
noise to it.
We then compute the periodogram using the periodogram function and the modified
periodogram with Bartlett window using the pwelch function.
Finally, we plot the PSD estimates obtained from both methods.
You can adjust the parameters such as the sampling frequency, signal frequency, and
noise characteristics according to your requirements.](https://image.slidesharecdn.com/adsplabcompletemanual-240712071556-e8e2ecbb/85/Adv-Digital-Signal-Processing-LAB-MANUAL-pdf-19-320.jpg)
![21
Dr. T.D. Shashikala Associate Professor Department of E&CE. University BDT College of
Engineering
7 Estimation of PSD using different methods (Bartlett, Welch, Blackman-
Tukey).
% Generate a noisy signal
fs = 1000; % Sampling frequency
t = 0:1/fs:1-1/fs; % Time vector
x = cos(2*pi*50*t) + randn(size(t)); % Noisy signal with sinusoidal component
% Define parameters
N = length(x); % Length of the signal
M = 100; % Window size for Bartlett and Welch methods
overlap = 50; % Overlap for Welch method
nfft = 2^nextpow2(N); % FFT length for Welch method
% Bartlett method
n_segments = floor(N / M); % Number of segments
Pxx_bartlett = zeros(nfft/2 + 1, 1); % Initialize PSD
for i = 1:n_segments
segment = x((i-1)*M+1 : i*M); % Extract segment
Pxx_bartlett = Pxx_bartlett + periodogram(segment, [], nfft, fs) /
n_segments; % Compute periodogram
end
% Welch method
[Pxx_welch, f_welch] = pwelch(x, hamming(M), overlap, nfft, fs); % Compute
Welch PSD
% Blackman-Tukey method
[Pxx_bt, f_bt] = pburg(x, 4, nfft, fs); % Compute Blackman-Tukey PSD
% Plot the PSD estimates
figure;
subplot(3, 1, 1);
plot(f_welch, 10*log10(Pxx_welch), 'LineWidth', 2);
xlabel('Frequency (Hz)');
ylabel('Power/Frequency (dB/Hz)');
title('Welch Method');
subplot(3, 1, 2);
plot(f_bt, 10*log10(Pxx_bt), 'LineWidth', 2);
xlabel('Frequency (Hz)');
ylabel('Power/Frequency (dB/Hz)');](https://image.slidesharecdn.com/adsplabcompletemanual-240712071556-e8e2ecbb/85/Adv-Digital-Signal-Processing-LAB-MANUAL-pdf-21-320.jpg)

![23
Dr. T.D. Shashikala Associate Professor Department of E&CE. University BDT College of
Engineering
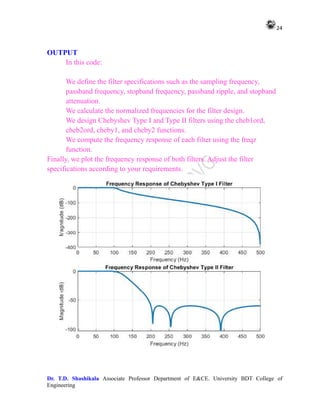
8. Design of Chebyshev Type I, II Filters
% Define filter specifications
fs = 1000; % Sampling frequency
fpass = 100; % Passband frequency (Hz)
fstop = 200; % Stopband frequency (Hz)
ripple_pass = 0.5; % Passband ripple (dB)
ripple_stop = 60; % Stopband attenuation (dB)
% Normalized frequencies
Wp = fpass / (fs/2);
Ws = fstop / (fs/2);
% Design Chebyshev Type I filter
[N1, Wn1] = cheb1ord(Wp, Ws, ripple_pass, ripple_stop);
[b1, a1] = cheby1(N1, ripple_pass, Wn1);
% Design Chebyshev Type II filter
[N2, Wn2] = cheb2ord(Wp, Ws, ripple_pass, ripple_stop);
[b2, a2] = cheby2(N2, ripple_stop, Wn2);
% Frequency response
[h1, w1] = freqz(b1, a1, 512, fs);
[h2, w2] = freqz(b2, a2, 512, fs);
% Plot frequency response of Chebyshev Type I filter
figure;
subplot(2, 1, 1);
plot(w1, 20*log10(abs(h1)), 'LineWidth', 2);
xlabel('Frequency (Hz)');
ylabel('Magnitude (dB)');
title('Frequency Response of Chebyshev Type I Filter');
grid on;
% Plot frequency response of Chebyshev Type II filter
subplot(2, 1, 2);
plot(w2, 20*log10(abs(h2)), 'LineWidth', 2);
xlabel('Frequency (Hz)');
ylabel('Magnitude (dB)');
title('Frequency Response of Chebyshev Type II Filter');
grid on;](https://image.slidesharecdn.com/adsplabcompletemanual-240712071556-e8e2ecbb/85/Adv-Digital-Signal-Processing-LAB-MANUAL-pdf-23-320.jpg)
![25
Dr. T.D. Shashikala Associate Professor Department of E&CE. University BDT College of
Engineering
9. Cascade Digital IIR Filter Realization
% Define the coefficients of the individual filters
b1 = [0.1, 0.2, 0.1];
a1 = [1, -0.5, 0.2];
b2 = [0.2, -0.3, 0.2];
a2 = [1, 0.1, 0.3];
% Generate the frequency response of the first filter
[H1, W1] = freqz(b1, a1);
% Generate the frequency response of the second filter
[H2, W2] = freqz(b2, a2);
% Zero-pad the frequency responses to have the same length
N = max(length(H1), length(H2));
H1 = padarray(H1, [0, N - length(H1)], 'post');
H2 = padarray(H2, [0, N - length(H2)], 'post');
% Cascade the filters by element-wise multiplication
H_cascade = H1 .* H2;
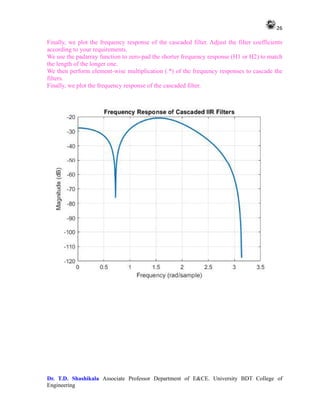
% Plot the frequency response of the cascaded filter
figure;
plot(W1, 20*log10(abs(H_cascade)), 'LineWidth', 2);
xlabel('Frequency (rad/sample)');
ylabel('Magnitude (dB)');
title('Frequency Response of Cascaded IIR Filters');
grid on;
OUTPUT
In this code:
We define the coefficients b1, a1 for the numerator and denominator polynomials of the first
filter.
We define the coefficients b2, a2 for the numerator and denominator polynomials of the second
filter.
We use the freqz function to compute the frequency response of each filter.
We cascade the filters by convolving their frequency responses.](https://image.slidesharecdn.com/adsplabcompletemanual-240712071556-e8e2ecbb/85/Adv-Digital-Signal-Processing-LAB-MANUAL-pdf-25-320.jpg)
![27
Dr. T.D. Shashikala Associate Professor Department of E&CE. University BDT College of
Engineering
10. Parallele Realization of IIR Filter
% Define the coefficients of the IIR filters
b1 = [0.1, 0.2, 0.1];
a1 = [1, -0.5, 0.2];
b2 = [0.2, -0.3, 0.2];
a2 = [1, 0.1, 0.3];
% Generate a sample input signal
fs = 1000; % Sampling frequency
t = 0:1/fs:1-1/fs; % Time vector
x = sin(2*pi*50*t) + sin(2*pi*120*t); % Input signal
% Apply the input signal to each filter and sum their outputs
y1 = filter(b1, a1, x);
y2 = filter(b2, a2, x);
y_parallel = y1 + y2;
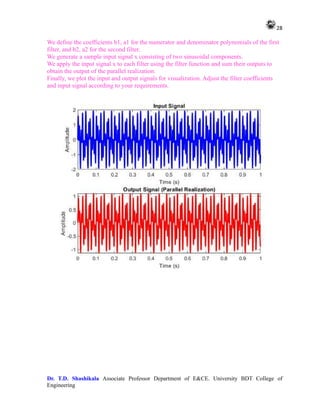
% Plot the input and output signals
figure;
subplot(2, 1, 1);
plot(t, x, 'b', 'LineWidth', 2);
xlabel('Time (s)');
ylabel('Amplitude');
title('Input Signal');
grid on;
subplot(2, 1, 2);
plot(t, y_parallel, 'r', 'LineWidth', 2);
xlabel('Time (s)');
ylabel('Amplitude');
title('Output Signal (Parallel Realization)');
grid on;
OUTPUT
In this code:](https://image.slidesharecdn.com/adsplabcompletemanual-240712071556-e8e2ecbb/85/Adv-Digital-Signal-Processing-LAB-MANUAL-pdf-27-320.jpg)
![29
Dr. T.D. Shashikala Associate Professor Department of E&CE. University BDT College of
Engineering
11. Estimation of Power spectrum using parametric methods (Yule-Walker
& Burg)
clc; close all;clear all;
% Generate a noisy signal
fs = 1000; % Sampling frequency
t = 0:1/fs:1-1/fs; % Time vector
x = cos(2*pi*50*t) + randn(size(t)); % Noisy signal with sinusoidal component
% Model order
p = 4;
% Yule-Walker method using Levinson-Durbin recursion
[rxx, lags] = xcorr(x, p, 'biased'); % Estimate autocorrelation
r = rxx(p+2:end); % Autocorrelation vector
a_yw = levinson(r, p); % Estimate AR coefficients
% Burg method
[a_burg, e_burg, k_burg] = pburg(x, p, p, fs); % Estimate AR coefficients
% Compute power spectrum using Yule-Walker method
[H_yw, w_yw] = freqz(1, a_yw, 512, fs);
% Compute power spectrum using Burg method
[H_burg, w_burg] = freqz(1, a_burg, 512, fs);
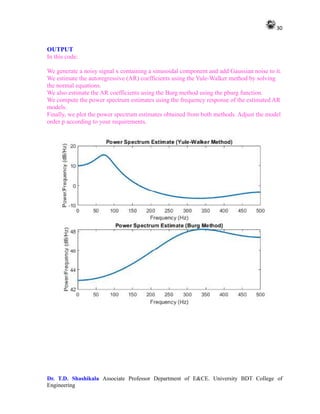
% Plot the power spectrum estimates
figure;
subplot(2, 1, 1);
plot(w_yw, 20*log10(abs(H_yw)), 'LineWidth', 2);
xlabel('Frequency (Hz)');
ylabel('Power/Frequency (dB/Hz)');
title('Power Spectrum Estimate (Yule-Walker Method)');
subplot(2, 1, 2);
plot(w_burg, 20*log10(abs(H_burg)), 'LineWidth', 2);
xlabel('Frequency (Hz)');
ylabel('Power/Frequency (dB/Hz)');
title('Power Spectrum Estimate (Burg Method)');](https://image.slidesharecdn.com/adsplabcompletemanual-240712071556-e8e2ecbb/85/Adv-Digital-Signal-Processing-LAB-MANUAL-pdf-29-320.jpg)


![33
Dr. T.D. Shashikala Associate Professor Department of E&CE. University BDT College of
Engineering
12. Design of LPC filter using Levinson-Durbin Algorithm
% Define the input signal
x = randn(1, 1000); % Random input signal of length 1000
% Order of the LPC filter
p = 10;
% Calculate autocorrelation of input signal
R = xcorr(x, p, 'biased');
% Implement the Levinson-Durbin recursion
[a, e] = levinson(R, p);
% Display the filter coefficients
disp('Filter coefficients:');
disp(a);
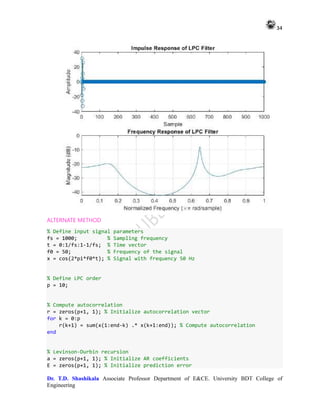
% Plot the impulse response of the LPC filter
impulse_response = filter([0 -a(2:end)], 1, [1 zeros(1, length(x)-1)]);
figure;
subplot(2,1,1);
stem(impulse_response);
title('Impulse Response of LPC Filter');
xlabel('Sample');
ylabel('Amplitude');
% Plot the frequency response of the LPC filter
[h, w] = freqz(1, a, 1024);
subplot(2,1,2);
plot(w/pi, 20*log10(abs(h)));
title('Frequency Response of LPC Filter');
xlabel('Normalized Frequency (timespi rad/sample)');
ylabel('Magnitude (dB)');
grid on;
This code generates a random input signal, calculates its autocorrelation, applies the
Levinson-Durbin recursion to estimate the LPC coefficients, and then plots the impulse
response and frequency response of the resulting LPC filter. You can adjust the order p of the
filter according to your requirements.](https://image.slidesharecdn.com/adsplabcompletemanual-240712071556-e8e2ecbb/85/Adv-Digital-Signal-Processing-LAB-MANUAL-pdf-33-320.jpg)
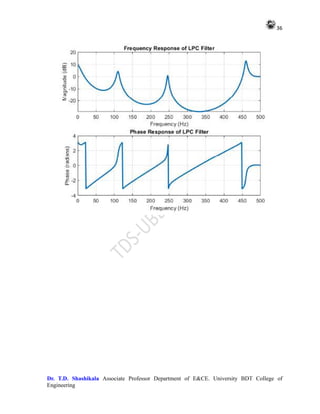
![35
Dr. T.D. Shashikala Associate Professor Department of E&CE. University BDT College of
Engineering
a(1) = 1; % First coefficient is always 1
for k = 1:p
% Compute k-th AR coefficient
num = r(k+1:-1:2).' * a(1:k); % Numerator of the recursion formula
den = r(1:k).' * a(1:k); % Denominator of the recursion formula
a(k+1) = -num / (den + eps);
% Update prediction error
E(k+1) = (1 - a(k+1)^2) * E(k);
% Update previous coefficients and error
a(1:k) = a(1:k) + a(k+1) * flipud(a(1:k));
end
% Compute frequency response of LPC filter
[H, w] = freqz(1, a, 512, fs);
% Plot frequency response
figure;
subplot(2,1,1);
plot(w, 20*log10(abs(H)), 'LineWidth', 2);
xlabel('Frequency (Hz)');
ylabel('Magnitude (dB)');
title('Frequency Response of LPC Filter');
grid on;
subplot(2,1,2);
plot(w, angle(H), 'LineWidth', 2);
xlabel('Frequency (Hz)');
ylabel('Phase (radians)');
title('Phase Response of LPC Filter');
grid on;
This code estimates the autocorrelation of the input signal and computes the LPC coefficients
using the Levinson-Durbin recursion. It then plots the magnitude and phase response of the
LPC filter. Adjust the LPC order p according to your requirements. Let me know if you need
further explanation or assistance!](https://image.slidesharecdn.com/adsplabcompletemanual-240712071556-e8e2ecbb/85/Adv-Digital-Signal-Processing-LAB-MANUAL-pdf-35-320.jpg)



The document outlines a practical manual for an Advanced Digital Signal Processing Lab at the University BDT College of Engineering, detailing experiments including the generation of discrete time signals, DFT and IDFT calculations, and PSD estimation using various methods. It also provides MATLAB scripts for signal generation, manipulation, and analysis, covering topics like DTMF signal generation, interpolation, and decimation of sequences. Additionally, it includes methods for time-frequency analysis and signal reconstruction using wavelet transforms.