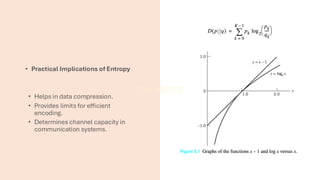
Download to read offline

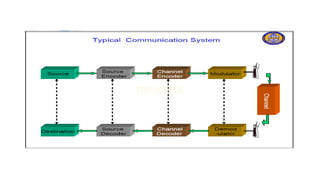

























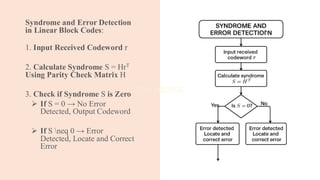
![Minimum Distance Considerations in
Linear Block Codes:
1. Input Codewords (Set of valid
codewords)
2. Compute Hamming Distance (Pairwise
distance between codewords)
3. Find Minimum Distance dmin
(Smallest nonzero Hamming distance)
4. Determine Error Detection &
Correction Capability
➢ t = [ (dmin - 1) / 2 ] (Error correction
capability)
➢ dmin - 1(Error detection capability)](https://image.slidesharecdn.com/eccmodule12slidesharewatermark-250814141816-87992968/85/ECC-module-1-2-SLIDESHARE_watermark-pdf-83-320.jpg)
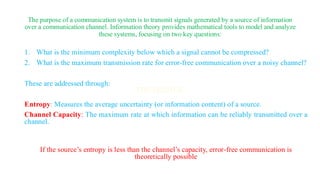
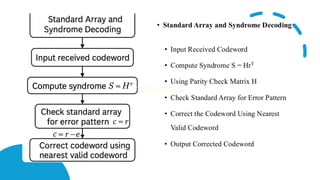
![Error Detecting and Error Correcting
Capabilities in Linear Block Codes:
1. Input Codewords and Minimum Distance dmin
2. Calculate Error Detection Capability (dmin - 1)
3. Calculate Error Correction Capability
(t = [(dmin - 1) / 2 ]
4. Determine System Capability
➢ If t is sufficient → Correct errors
➢ If not → Only detect errors](https://image.slidesharecdn.com/eccmodule12slidesharewatermark-250814141816-87992968/85/ECC-module-1-2-SLIDESHARE_watermark-pdf-84-320.jpg)
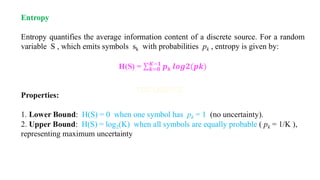
![Single Parity Check (SPC) Codes with
important equations.
1. Input Message Bits : m
2. Compute Parity Bit p Using:
p = m1 ⊕ m2 ⊕ …. ⊕ mk
(Where ⊕ is XOR operation)
3. Generate Codeword c = [m, p]
4. Transmit Codeword
5. At Receiver: Compute Syndrome S
S = c1 ⊕ c2 ⊕ …. ⊕ cn
6. Check for Errors:
➢ If S = 0, No Error.
➢ If S ≠ 0, Error Detected
(SPC can only detect single-bit errors).](https://image.slidesharecdn.com/eccmodule12slidesharewatermark-250814141816-87992968/85/ECC-module-1-2-SLIDESHARE_watermark-pdf-86-320.jpg)

PPT on Error Control Coding prepared by Dr. T.D. Shashikala, Associate Professor, E&C Dept., University B.D.T. College of Engineering, VTU, Davanagere, Karnataka, India. Based on: Digital Communication Systems – Simon Haykin, 2014 Error Control Coding – Shu Lin & Daniel J. Costello Jr., 2004 References include works by Blahut, Gravano, and Sklar. Covers key concepts for students, educators, and researchers in digital communications.