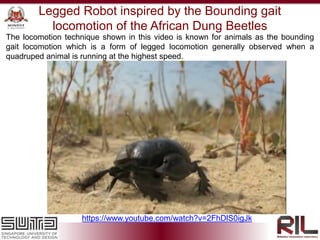
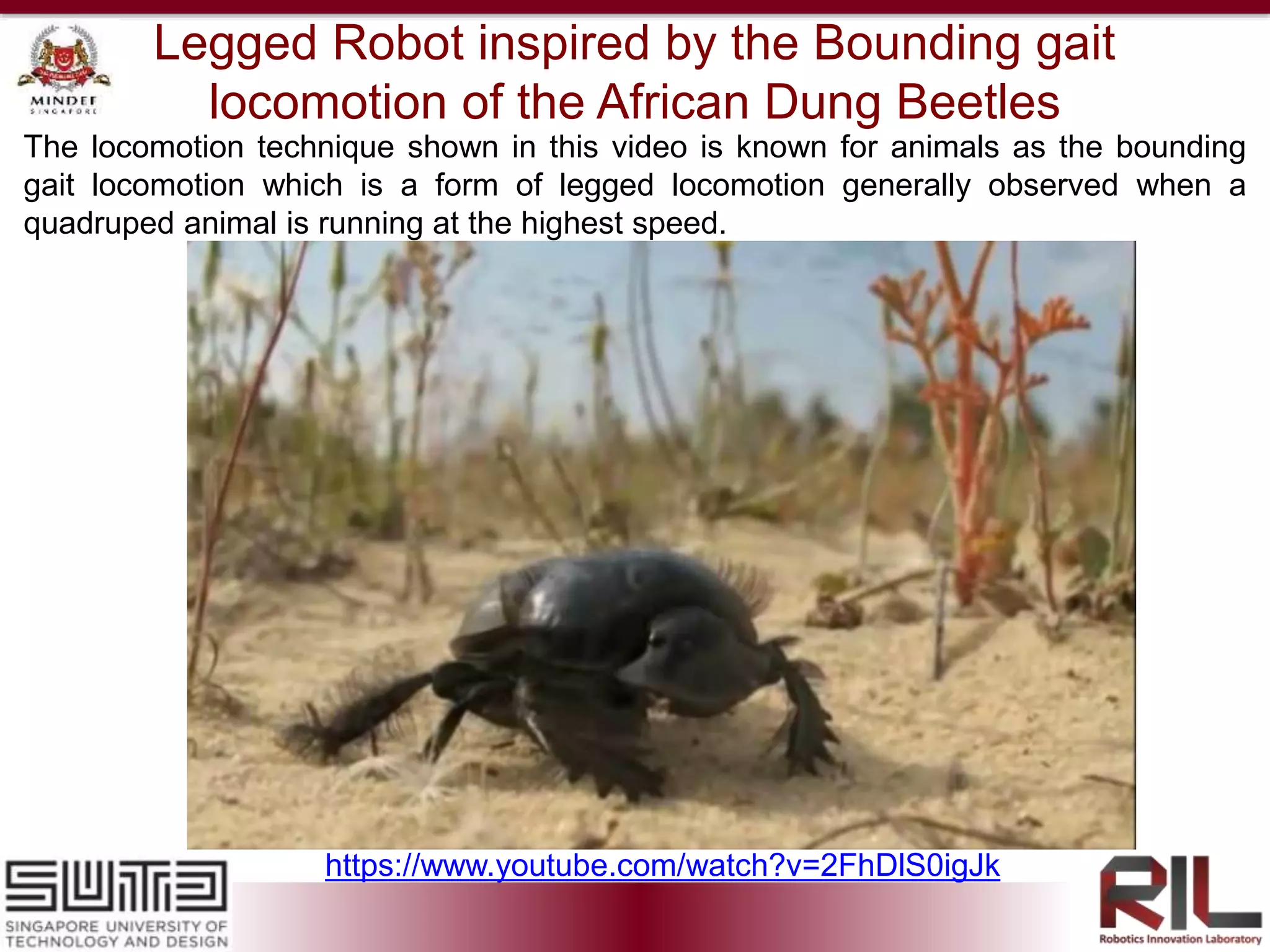
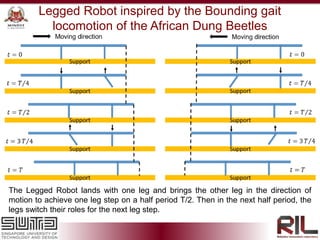
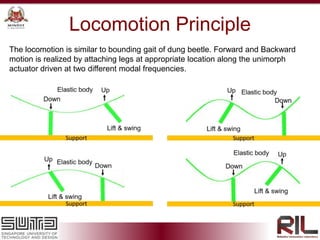
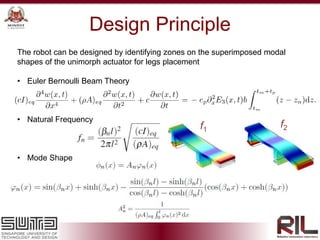
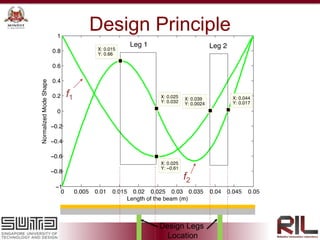
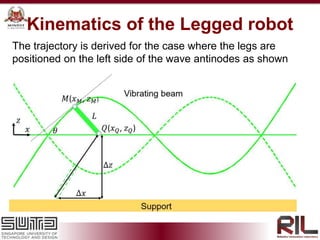
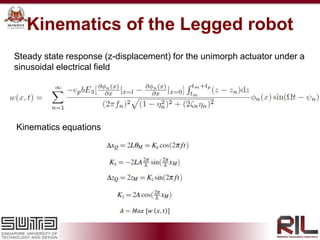
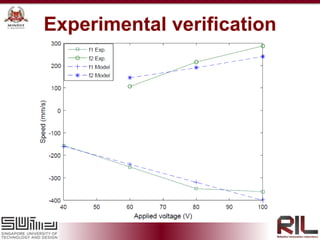

The document describes a legged robot inspired by the bounding gait locomotion of the African dung beetle, capable of bi-directional motion. This robot utilizes a piezoelectric patch and a unimorph actuator to replicate the creature's movement mechanics, allowing the legs to alternate in positioning for locomotion. It includes various references to studies and experimental verifications related to this robotic design and its kinematics.








































![[Isentek] eCompass API Quick Start](https://cdn.slidesharecdn.com/ss_thumbnails/isentekecompassapiquickstartv2-161115133752-thumbnail.jpg?width=640&height=640&fit=bounds)


![[Advantech] Modbus protocol training (ModbusTCP, ModbusRTU)](https://cdn.slidesharecdn.com/ss_thumbnails/modbustraining-161115125830-thumbnail.jpg?width=640&height=640&fit=bounds)






















































