
Download to read offline
![12/20/2013
Wheels and testing conditions
McMaster
Small
McMaster
Large
3D Printed
MIT Smooth
Diameter [mm]
152.4
203.2
145 (to lug tips)
260
Width [mm]
44.5
50.8
76.2
160
Fz Tested [N]
7
20
10, 18
60, 120
Loose
Loose and
Compact
Loose and compact
(only for 18 N)
Loose and
Compact
Terrain State Tested
(Poppy seeds)
McMaster
Small
McMaster
Large
3D Printed
MIT Smooth (approx. to scale)
20](https://image.slidesharecdn.com/paper809600-140205164101-phpapp02/75/A-Terradynamics-for-Legged-Locomotion-on-Granular-Media-20-2048.jpg)
![12/20/2013
Drawbar vs. slip ratio in experiment and model
Experiment
WR
RFT
10
Drawbar [N]
5
0
-5
-0.5
0
0.5
Slip
21](https://image.slidesharecdn.com/paper809600-140205164101-phpapp02/75/A-Terradynamics-for-Legged-Locomotion-on-Granular-Media-21-2048.jpg)
![12/20/2013
Experiment
WR
RFT
10
3D Printed
Fz = 18 N
Compact
Drawbar [N]
5
0
-5
-0.5
0
0.5
Slip
0.8
25
Sinkage [mm]
Torque [Nm]
0.6
0.4
0.2
15
10
0
-0.2
20
-0.6 -0.4 -0.2
0
Slip
0.2
0.4
0.6
-0.6 -0.4 -0.2
0
0.2
0.4
0.6
Slip
22](https://image.slidesharecdn.com/paper809600-140205164101-phpapp02/75/A-Terradynamics-for-Legged-Locomotion-on-Granular-Media-22-2048.jpg)
![12/20/2013
Experiment
WR
RFT
6
4
McMaster
Large
Fz = 20 N
Compact
Drawbar [N]
2
0
-2
-4
-6
-8
-10
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
Slip
35
1
30
Sinkage [mm]
Torque [Nm]
0.8
0.6
0.4
0.2
25
20
15
0
10
-0.2
-0.6 -0.4 -0.2
0
Slip
0.2
0.4
0.6
5
-0.6 -0.4 -0.2
0
0.2
0.4
0.6
Slip
23](https://image.slidesharecdn.com/paper809600-140205164101-phpapp02/75/A-Terradynamics-for-Legged-Locomotion-on-Granular-Media-23-2048.jpg)

![12/20/2013
3
McMaster
Small
Fz = 7 N
Loose
Experiment
WR
RFT
2
Drawbar [N]
1
0
-1
-2
-3
-4
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
Slip
0.3
30
0.25
25
Sinkage [mm]
Torque [Nm]
0.2
0.15
0.1
0.05
0
20
15
10
-0.05
-0.5
0
Slip
0.5
-0.6 -0.4 -0.2
0
0.2
0.4
0.6
Slip
27](https://image.slidesharecdn.com/paper809600-140205164101-phpapp02/75/A-Terradynamics-for-Legged-Locomotion-on-Granular-Media-27-2048.jpg)
![12/20/2013
Drawbar [N]
5
Experiment
WR
RFT
McMaster
Large
Fz = 20 N
Loose
0
-5
-10
-0.6 -0.4 -0.2
0
0.2
0.4
0.6
Slip
1.2
50
1
Sinkage [mm]
Torque [Nm]
0.8
0.6
0.4
0.2
40
30
20
0
10
-0.2
-0.6 -0.4 -0.2
0
Slip
0.2
0.4
0.6
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
Slip
28](https://image.slidesharecdn.com/paper809600-140205164101-phpapp02/75/A-Terradynamics-for-Legged-Locomotion-on-Granular-Media-28-2048.jpg)
![12/20/2013
Experiment
WR
RFT
6
4
McMaster
Large
Fz = 20 N
Compact
Drawbar [N]
2
0
-2
-4
-6
-8
-10
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
Slip
35
1
30
Sinkage [mm]
Torque [Nm]
0.8
0.6
0.4
0.2
25
20
15
0
10
-0.2
-0.6 -0.4 -0.2
0
Slip
0.2
0.4
0.6
5
-0.6 -0.4 -0.2
0
0.2
0.4
0.6
Slip
29](https://image.slidesharecdn.com/paper809600-140205164101-phpapp02/75/A-Terradynamics-for-Legged-Locomotion-on-Granular-Media-29-2048.jpg)
![12/20/2013
3
Experiment
WR
RFT
2
Drawbar [N]
1
3D Printed
Fz = 10 N
Loose
0
-1
-2
-3
-4
-5
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
Slip
25
0.4
Sinkage [mm]
20
Torque [Nm]
0.3
0.2
0.1
15
10
0
-0.1
-0.6 -0.4 -0.2
0
Slip
0.2
0.4
0.6
-0.5
0
0.5
Slip
30](https://image.slidesharecdn.com/paper809600-140205164101-phpapp02/75/A-Terradynamics-for-Legged-Locomotion-on-Granular-Media-30-2048.jpg)
![12/20/2013
Experiment
WR
RFT
Drawbar [N]
5
3D Printed
Fz = 18 N
Loose
0
-5
-10
-0.6 -0.4 -0.2
0
0.2
0.4
0.6
Slip
35
30
Sinkage [mm]
Torque [Nm]
0.6
0.4
0.2
25
20
15
0
10
-0.2
-0.6 -0.4 -0.2
0
Slip
0.2
0.4
0.6
-0.5
0
0.5
Slip
31](https://image.slidesharecdn.com/paper809600-140205164101-phpapp02/75/A-Terradynamics-for-Legged-Locomotion-on-Granular-Media-31-2048.jpg)
![12/20/2013
Experiment
WR
RFT
10
3D Printed
Fz = 18 N
Compact
Drawbar [N]
5
0
-5
-0.5
0
0.5
Slip
0.8
25
Sinkage [mm]
Torque [Nm]
0.6
0.4
0.2
15
10
0
-0.2
20
-0.6 -0.4 -0.2
0
Slip
0.2
0.4
0.6
-0.6 -0.4 -0.2
0
0.2
0.4
0.6
Slip
32](https://image.slidesharecdn.com/paper809600-140205164101-phpapp02/75/A-Terradynamics-for-Legged-Locomotion-on-Granular-Media-32-2048.jpg)
![12/20/2013
30
Experiment L
Experiment C
WR L
WR C
RFT L
RFT C
Drawbar [N]
20
10
0
MIT Wheel
Fz = 60 N
Compact/Loose
-10
-20
-30
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
50
Slip
4
40
Sinkage [mm]
Torque [Nm]
3
2
1
0
30
20
10
-1
-0.5
0
Slip
0.5
-0.6 -0.4 -0.2
0
0.2
0.4
0.6
Slip
33](https://image.slidesharecdn.com/paper809600-140205164101-phpapp02/75/A-Terradynamics-for-Legged-Locomotion-on-Granular-Media-33-2048.jpg)
![12/20/2013
Experiment L
Experiment C
WR L
WR C
RFT L
RFT C
40
Drawbar [N]
20
0
MIT Wheel
Fz = 120 N
Compact/Loose
-20
-40
-60
-0.6 -0.4 -0.2
0
0.2
0.4
8
60
50
Sinkage [mm]
6
Torque [Nm]
0.6
Slip
4
2
40
30
20
0
10
-2
-0.6 -0.4 -0.2
-0.5
0
0.5
0
0.2
0.4
0.6
Slip
Slip
34](https://image.slidesharecdn.com/paper809600-140205164101-phpapp02/75/A-Terradynamics-for-Legged-Locomotion-on-Granular-Media-34-2048.jpg)
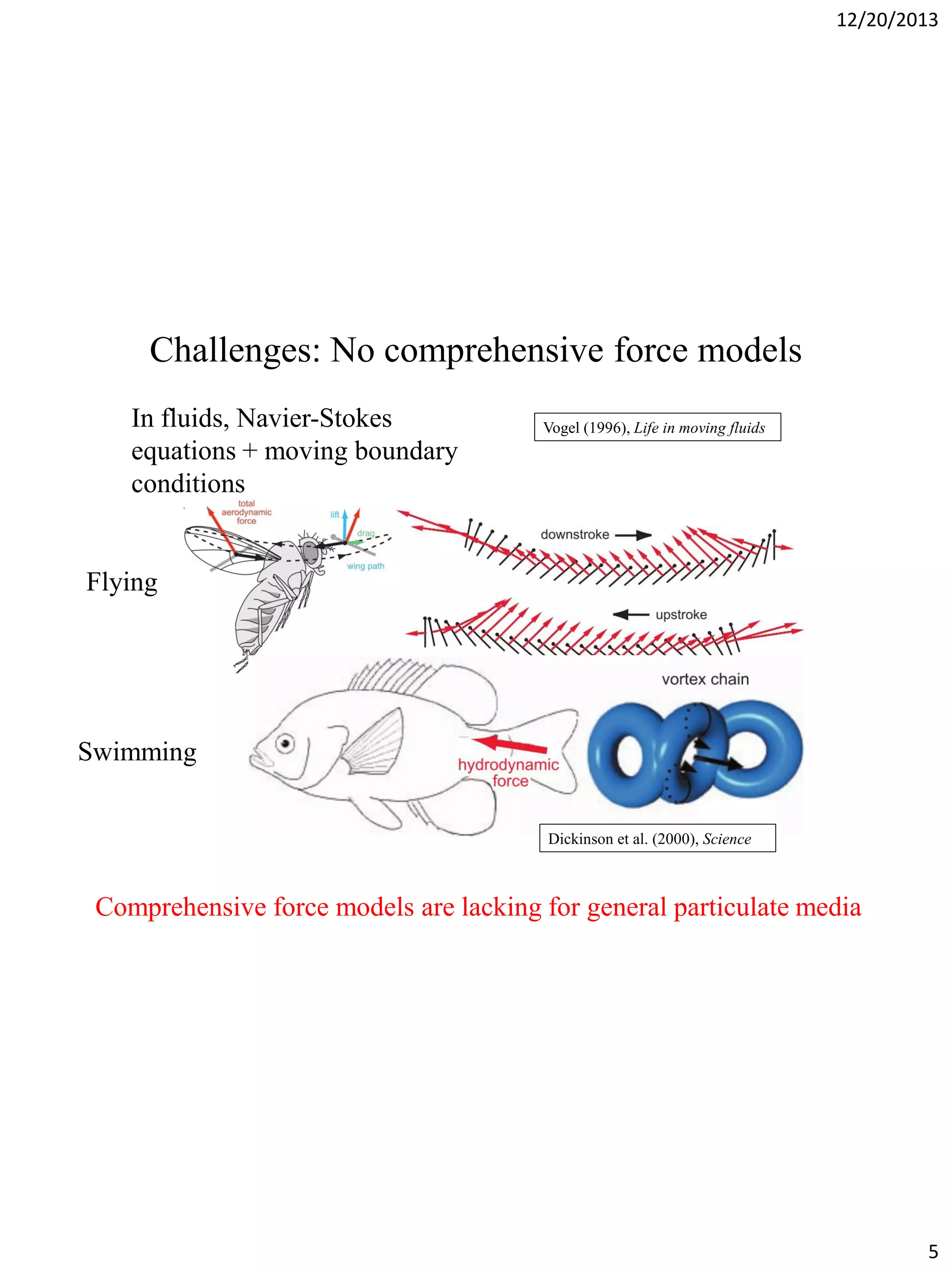
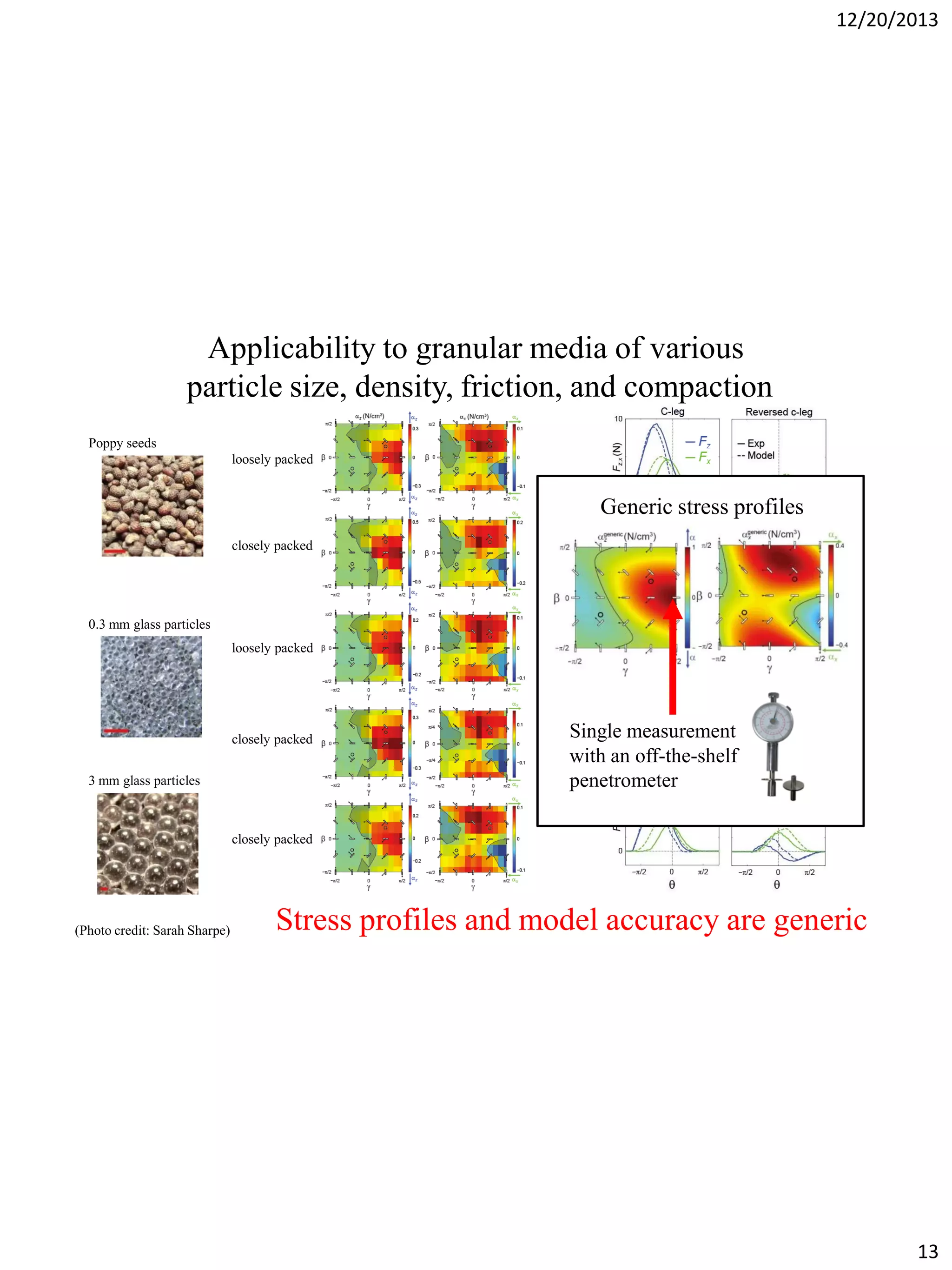
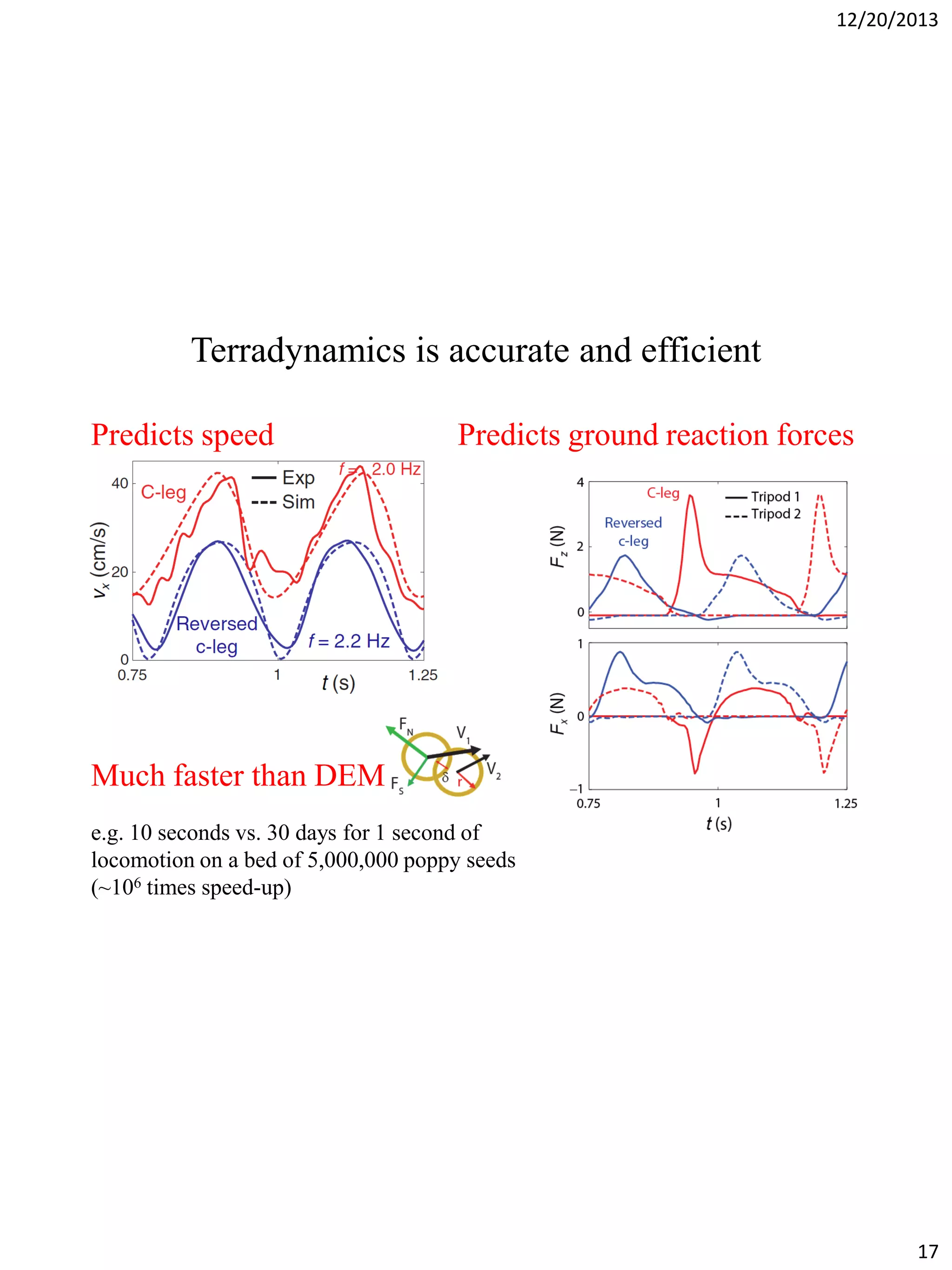
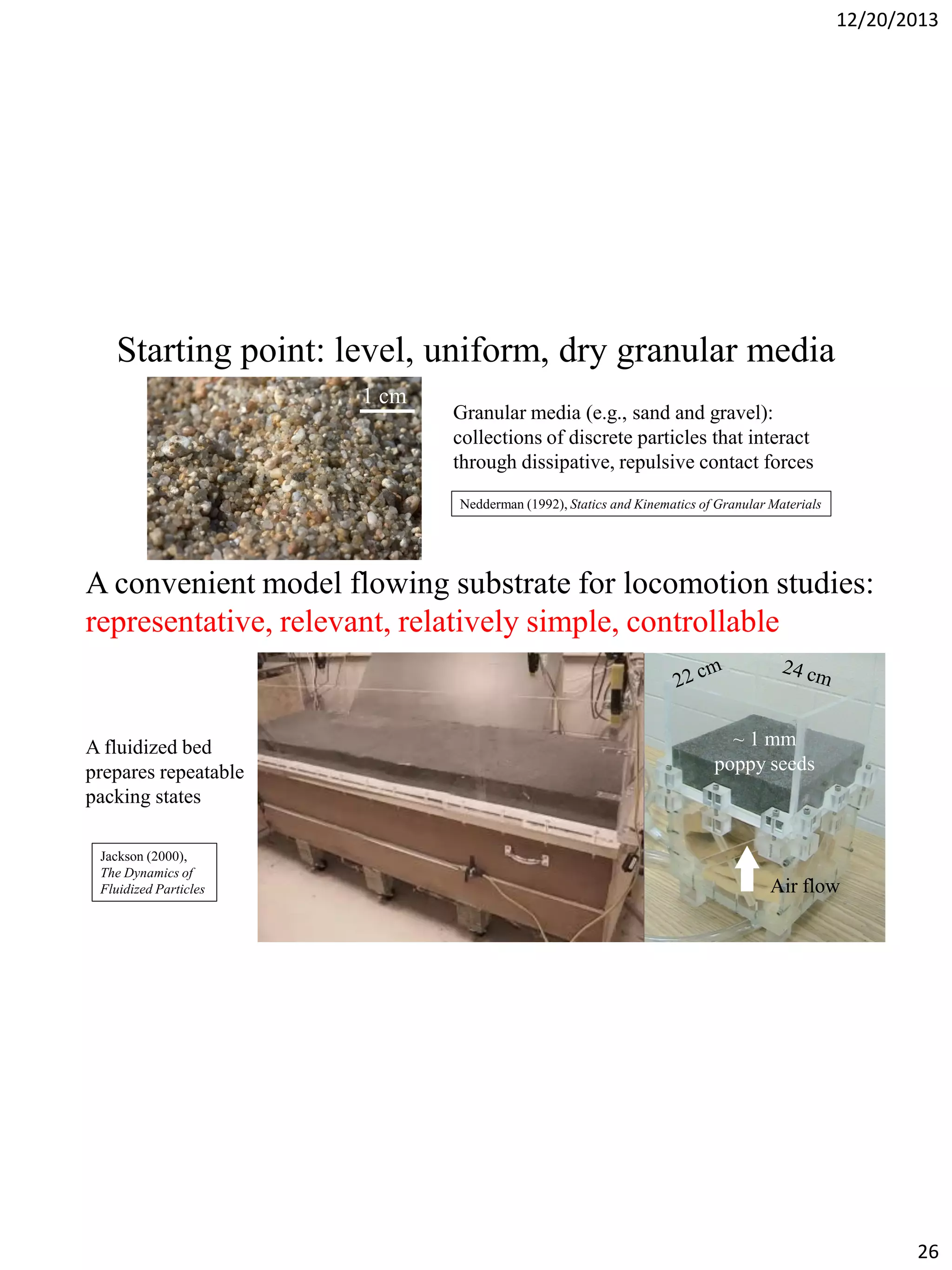
The document discusses terradynamics for legged locomotion on granular media, addressing the challenges posed by granular substrates and the complexity of limb-ground interactions. It presents a resistive force model that predicts locomotion performance without fitting parameters and compares various simulation methods, including discrete element methods and multi-body dynamics. The findings suggest that the resistive force model is effective and much faster than traditional methods for predicting performance in granular environments.



























































![Coded Agents – with UiPath SDK + LangGraph [Virtual Hands-on Workshop]](https://cdn.slidesharecdn.com/ss_thumbnails/codedagentsdeck-251215155422-5497c599-thumbnail.jpg?width=640&height=640&fit=bounds)




