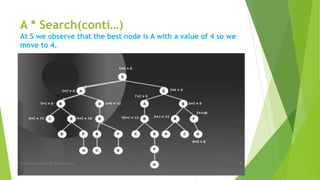
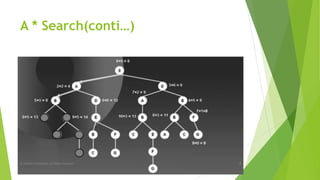
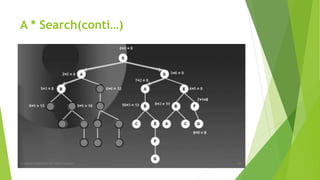
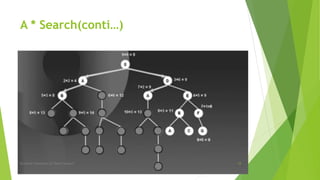
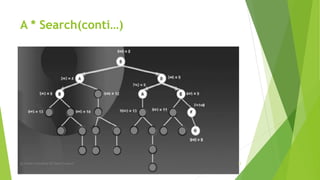
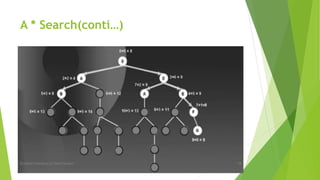
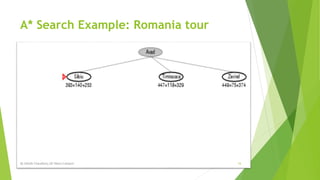
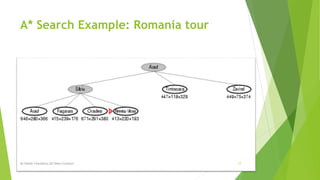
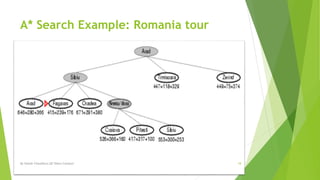
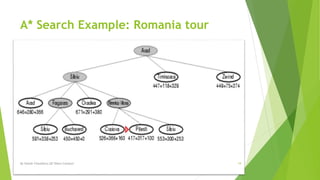
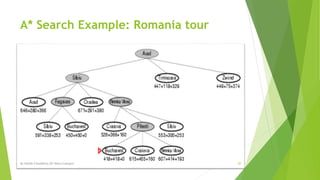
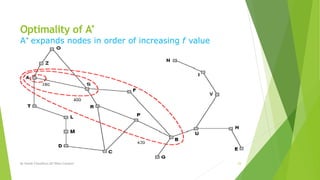
The document discusses the A* search algorithm, which is an informed search or heuristic search algorithm. A* combines the best aspects of uniform cost search and greedy best-first search. It is guaranteed to find the shortest path to the goal, if such a path exists. A* evaluates nodes by using both the path cost from the start node to the current node, plus an estimate of the cost to get from the current node to the goal node. It prioritizes expanding the most promising nodes first, those with the lowest combined cost. A* is optimal and admissible if the heuristic function never overestimates the actual cost to the goal.