Downloaded 76 times






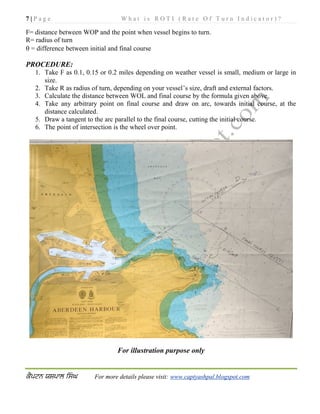

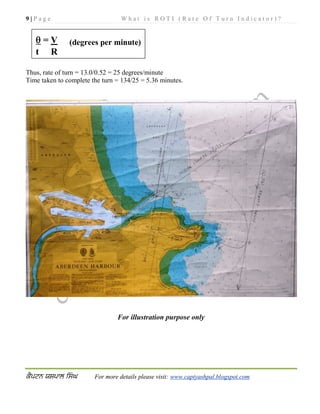

1) ROTI (Rate of Turn Indicator) is an instrument that assists ship officers in planning, executing, and monitoring a vessel's progress along curved segments of its charted course. It indicates the rate of turn (in degrees per minute) to port or starboard. 2) For large vessels, turns must be executed along curved paths rather than sharp corners due to momentum and water friction. ROTI helps determine the radius and rate of turn needed based on factors like vessel size and speed. 3) There are two main turn types - constant radius, where the radius remains fixed and rate of turn varies, and constant rate, where the rate of turn remains fixed and the radius varies. The document provides







![[7] trim](https://cdn.slidesharecdn.com/ss_thumbnails/7trim-120403043947-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)





































































