
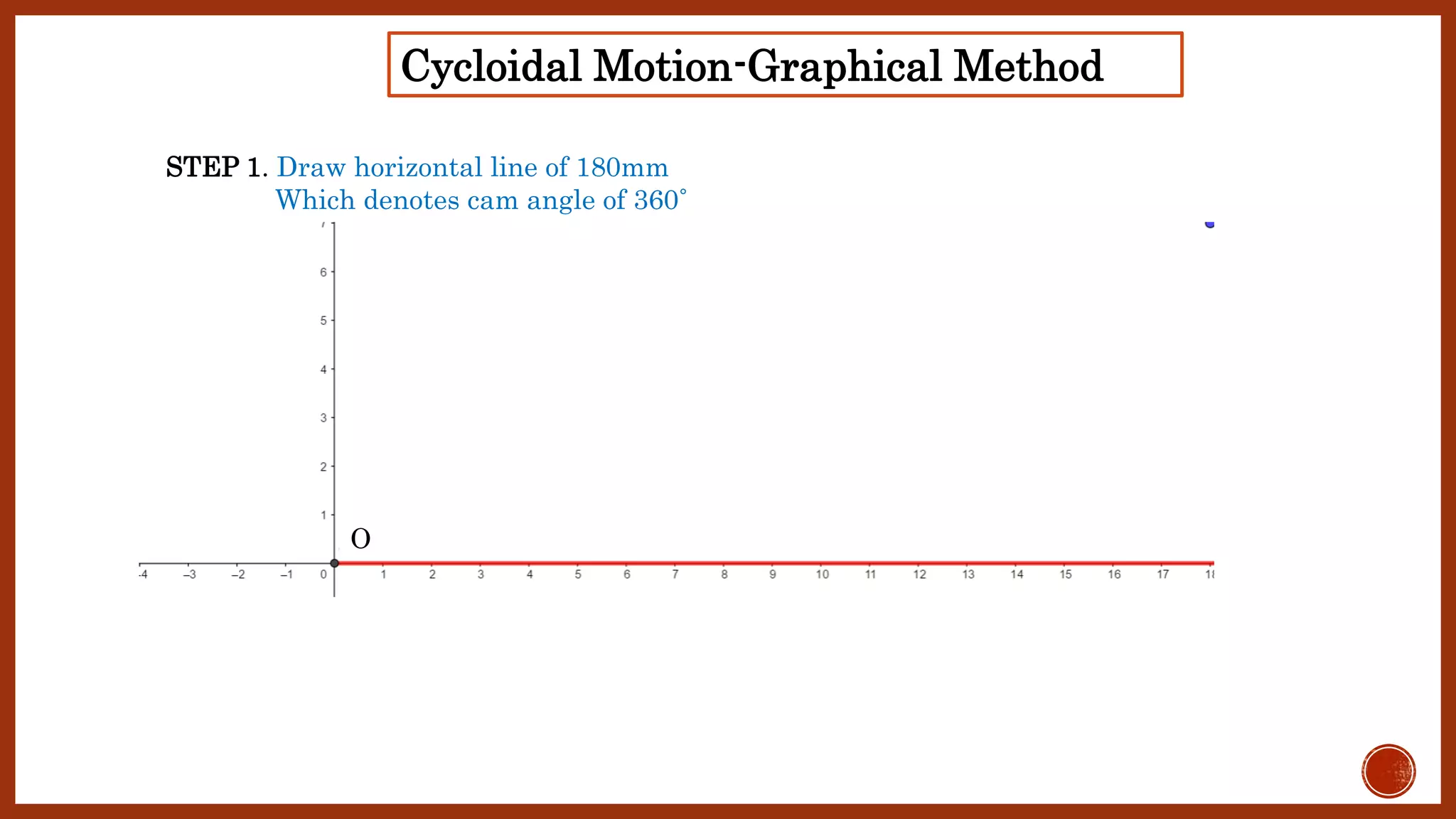
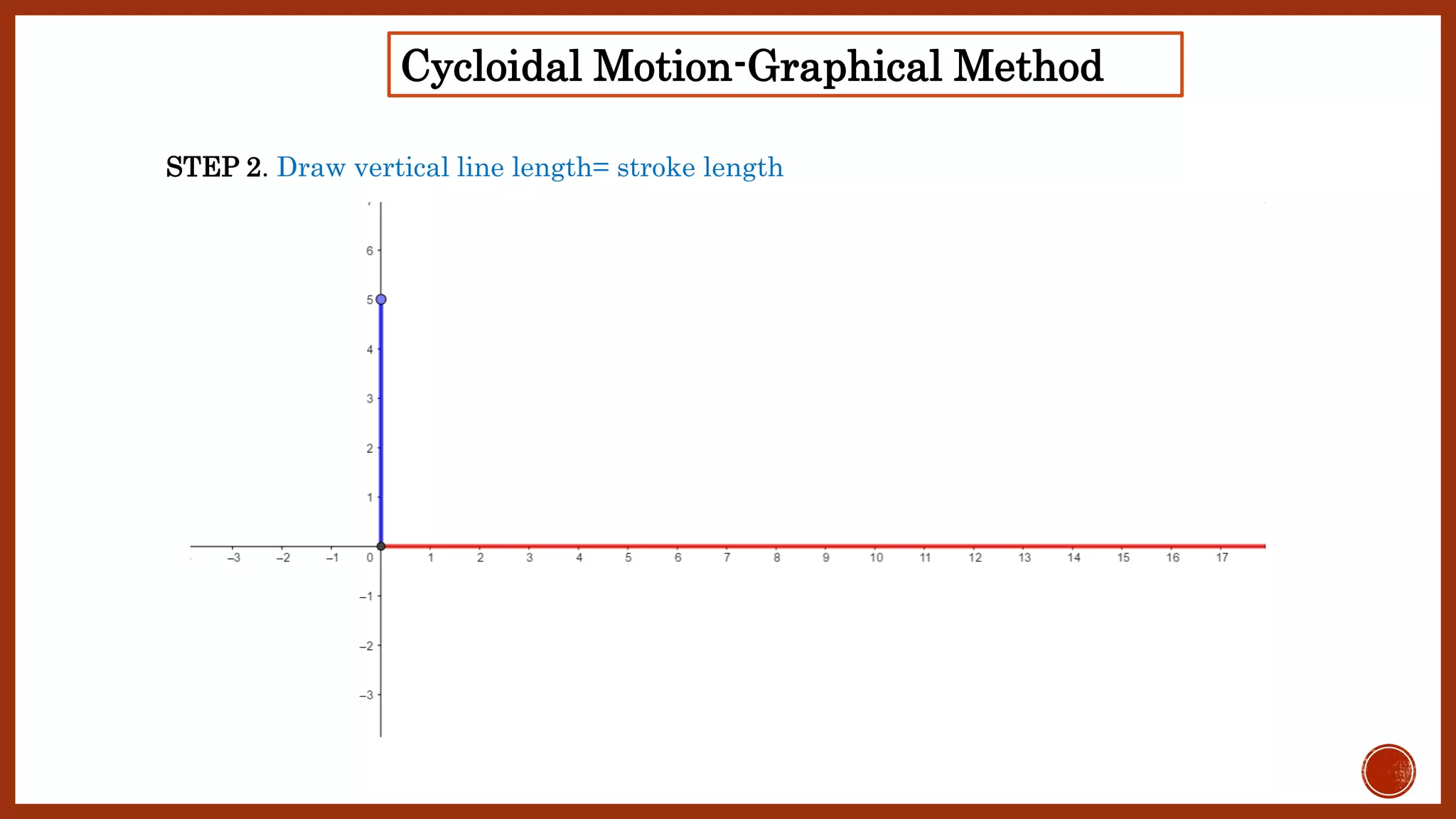


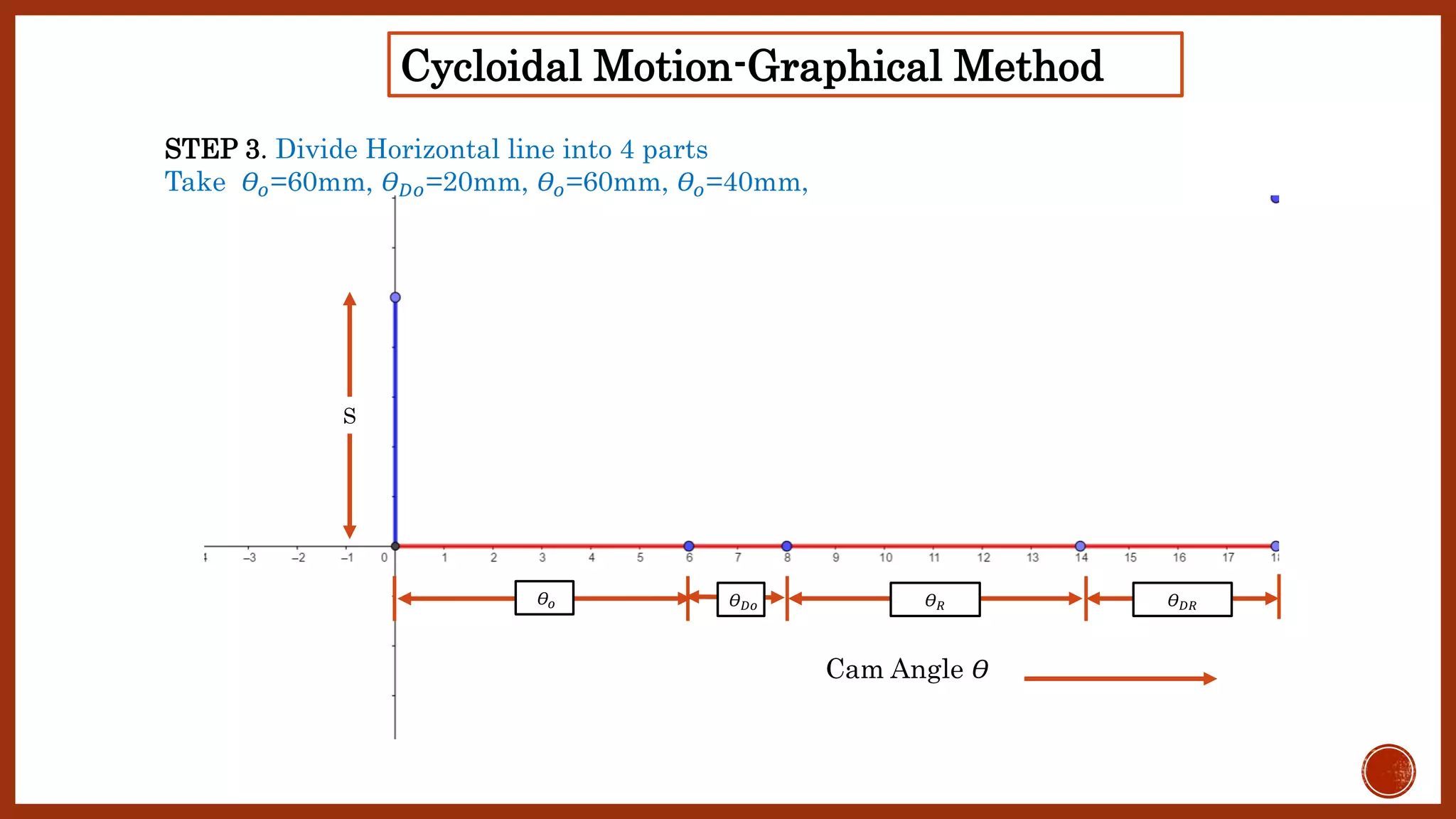

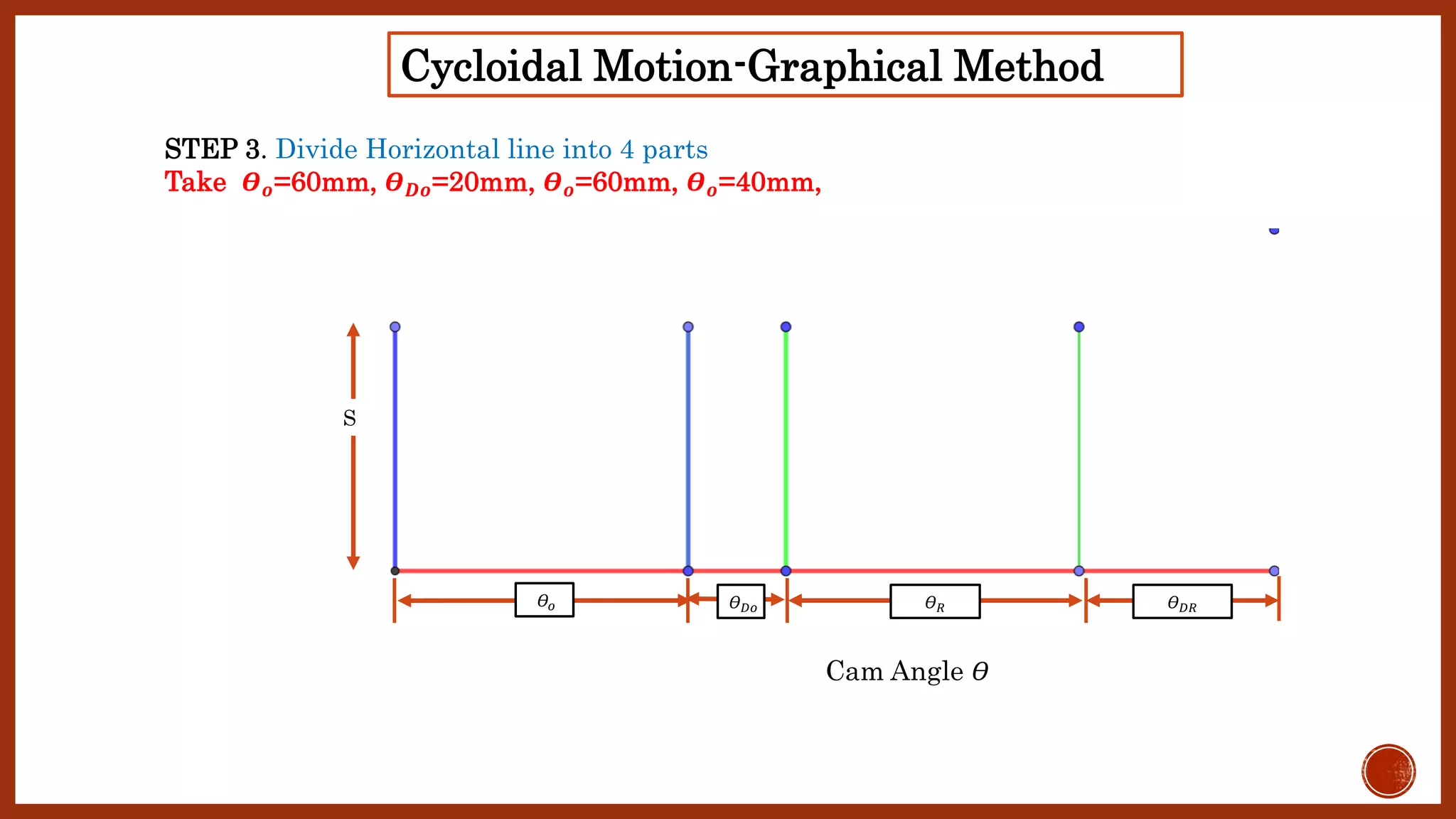
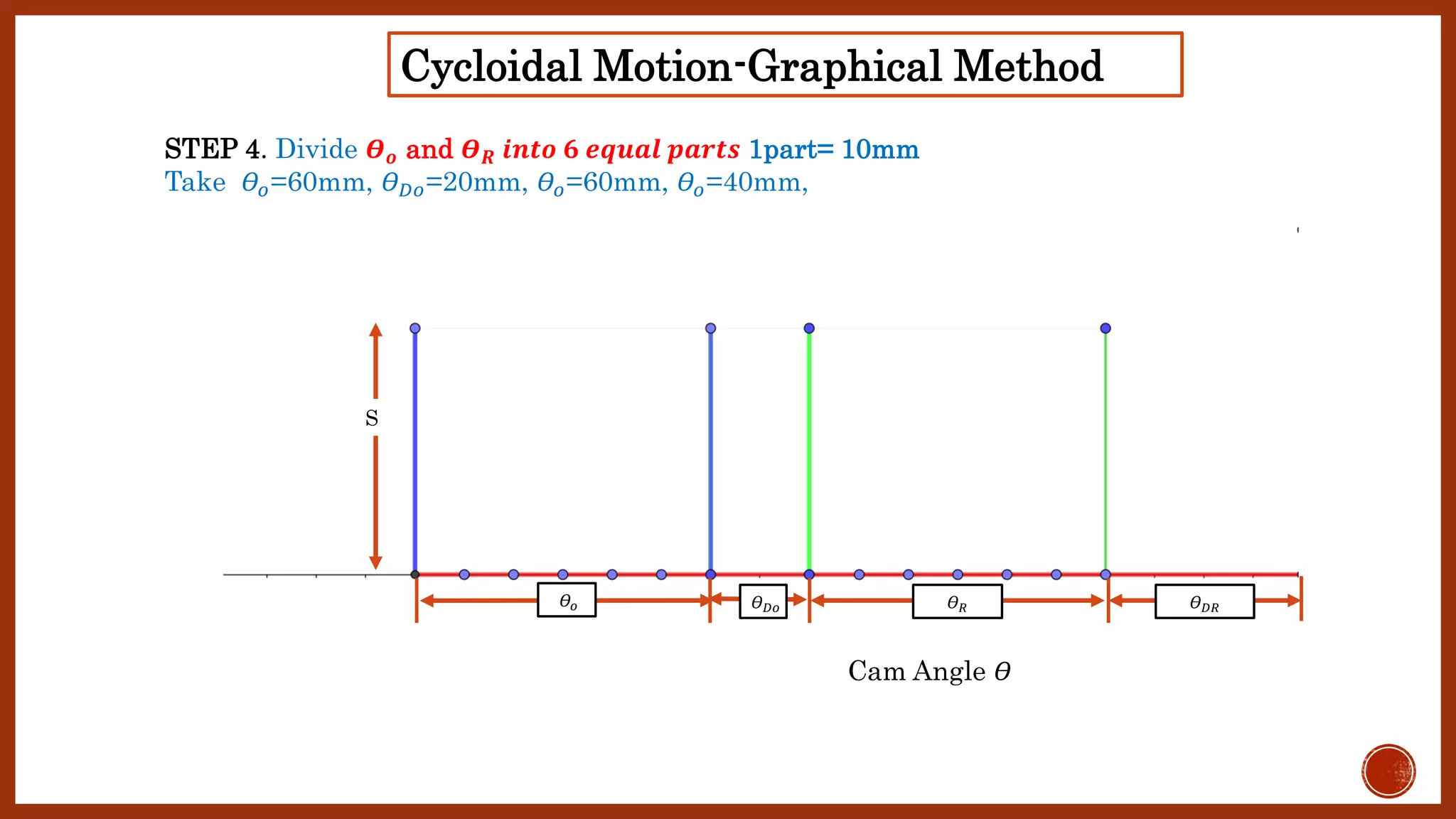


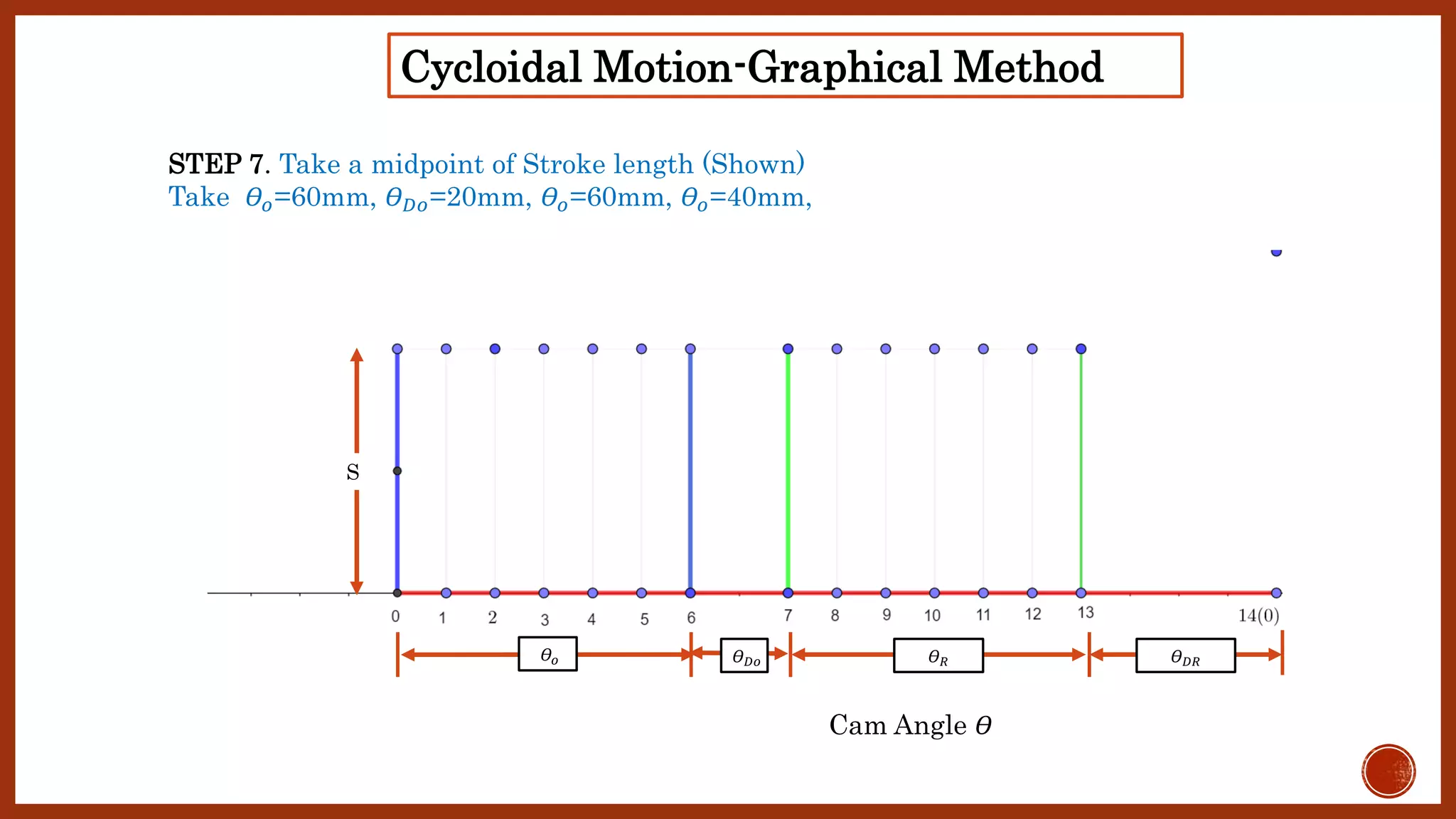




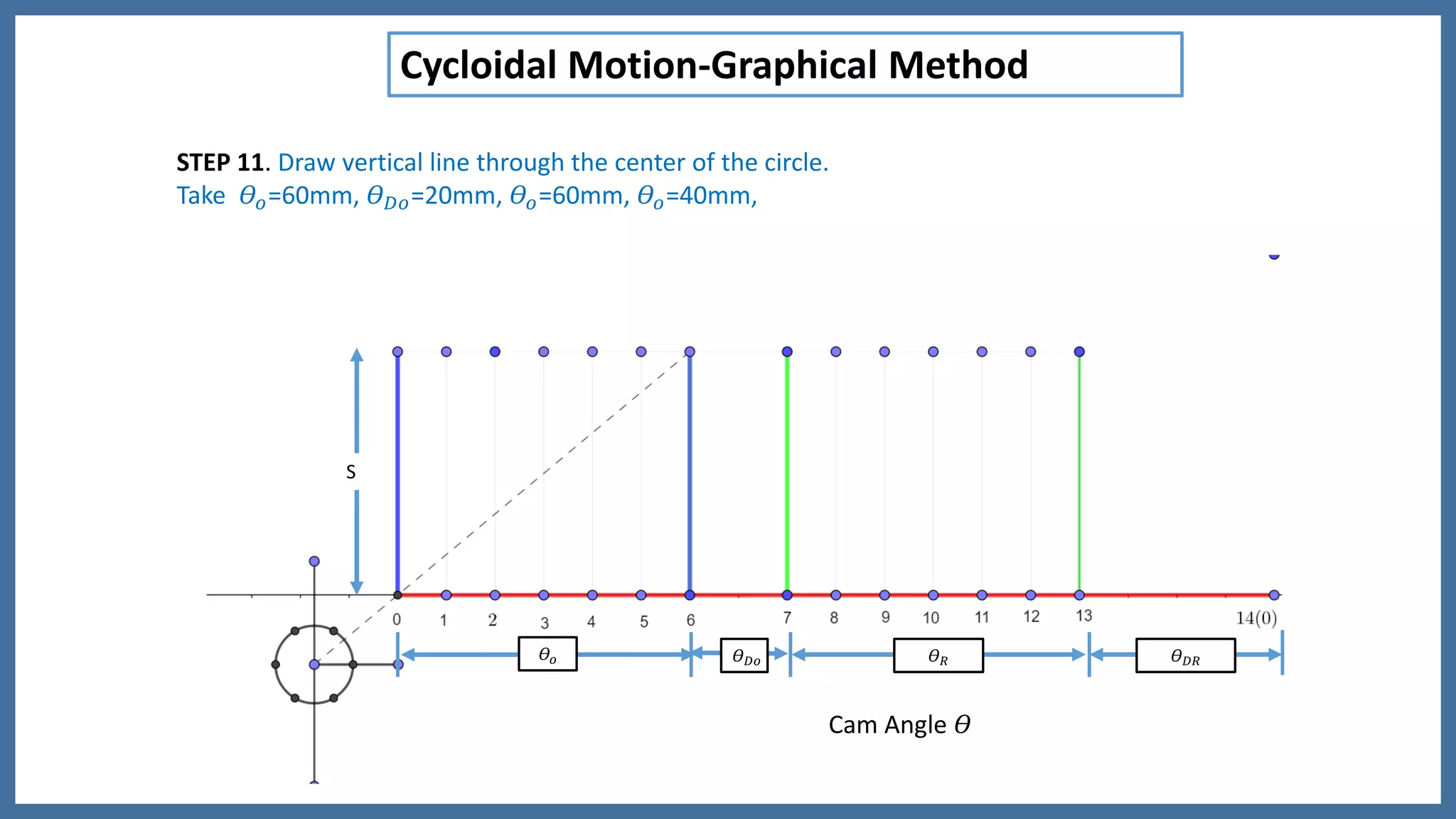


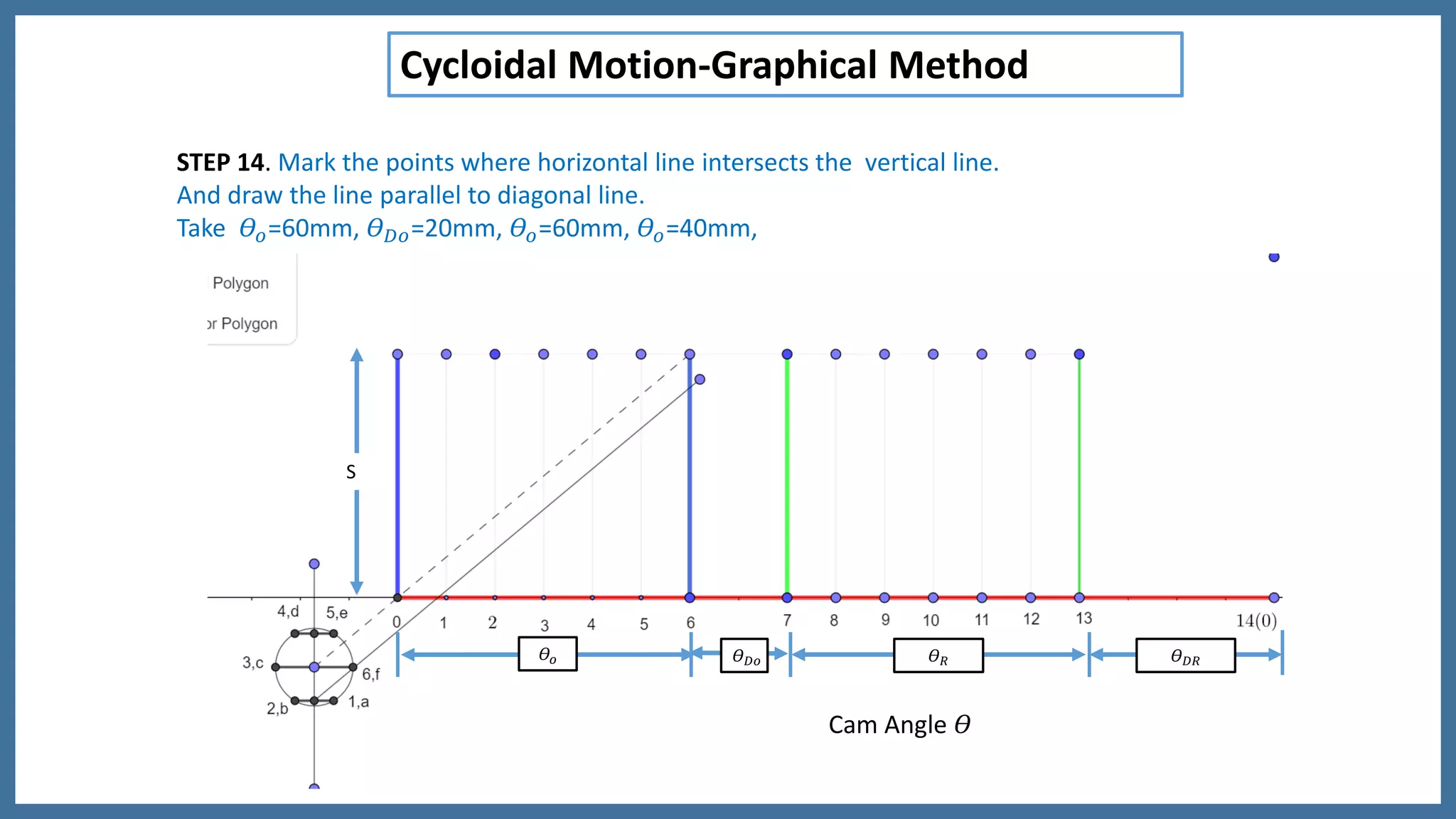


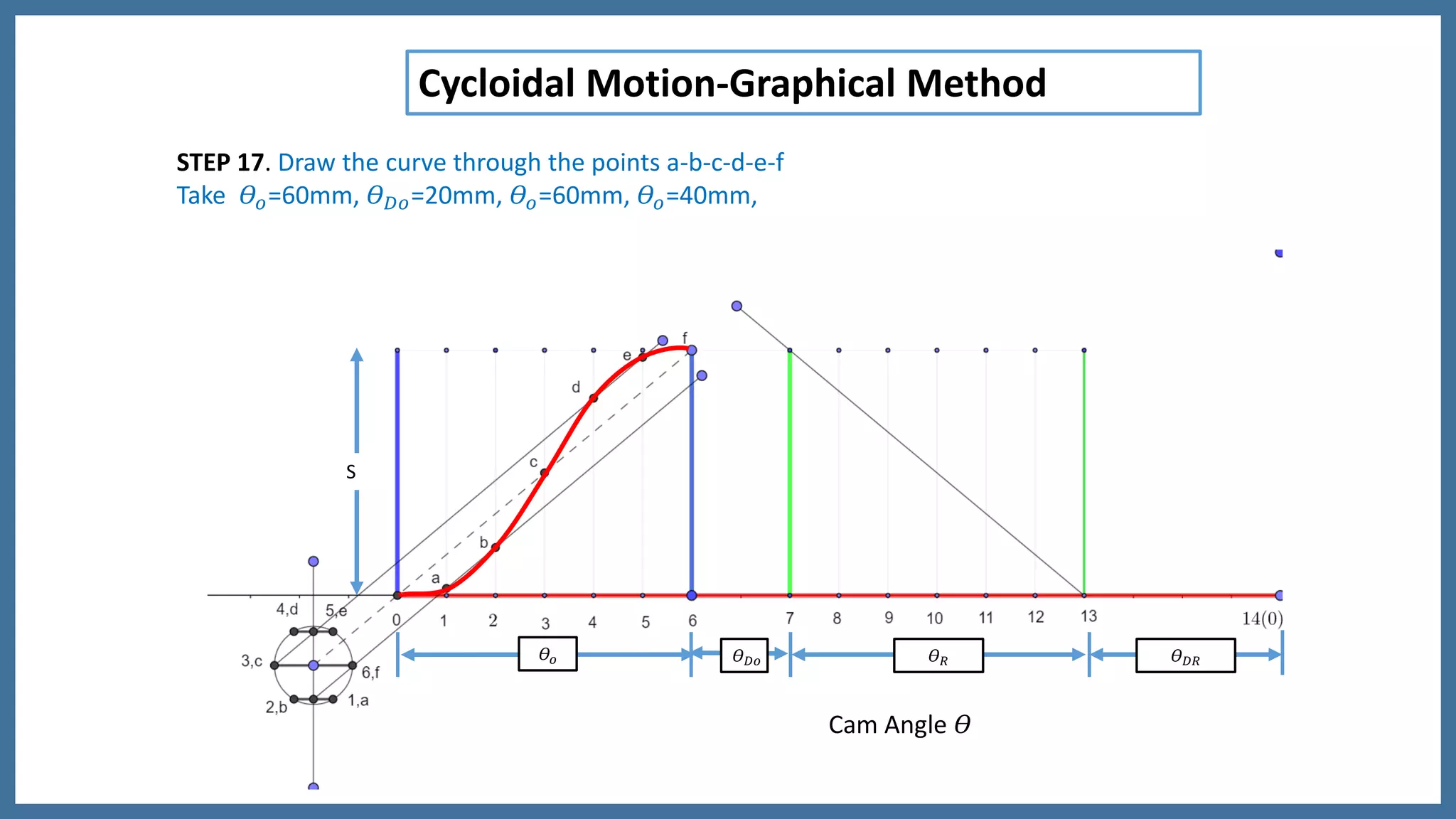



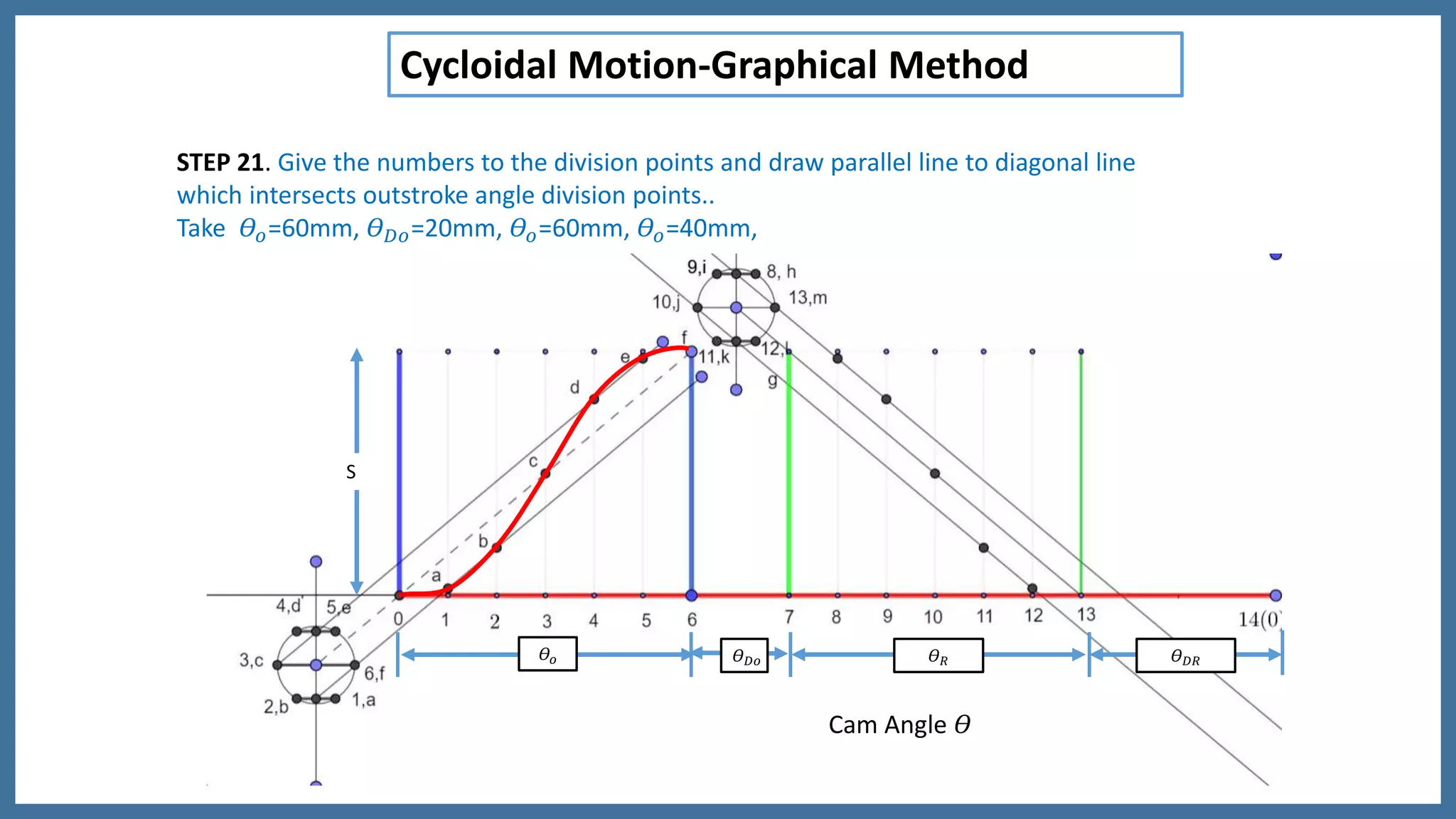

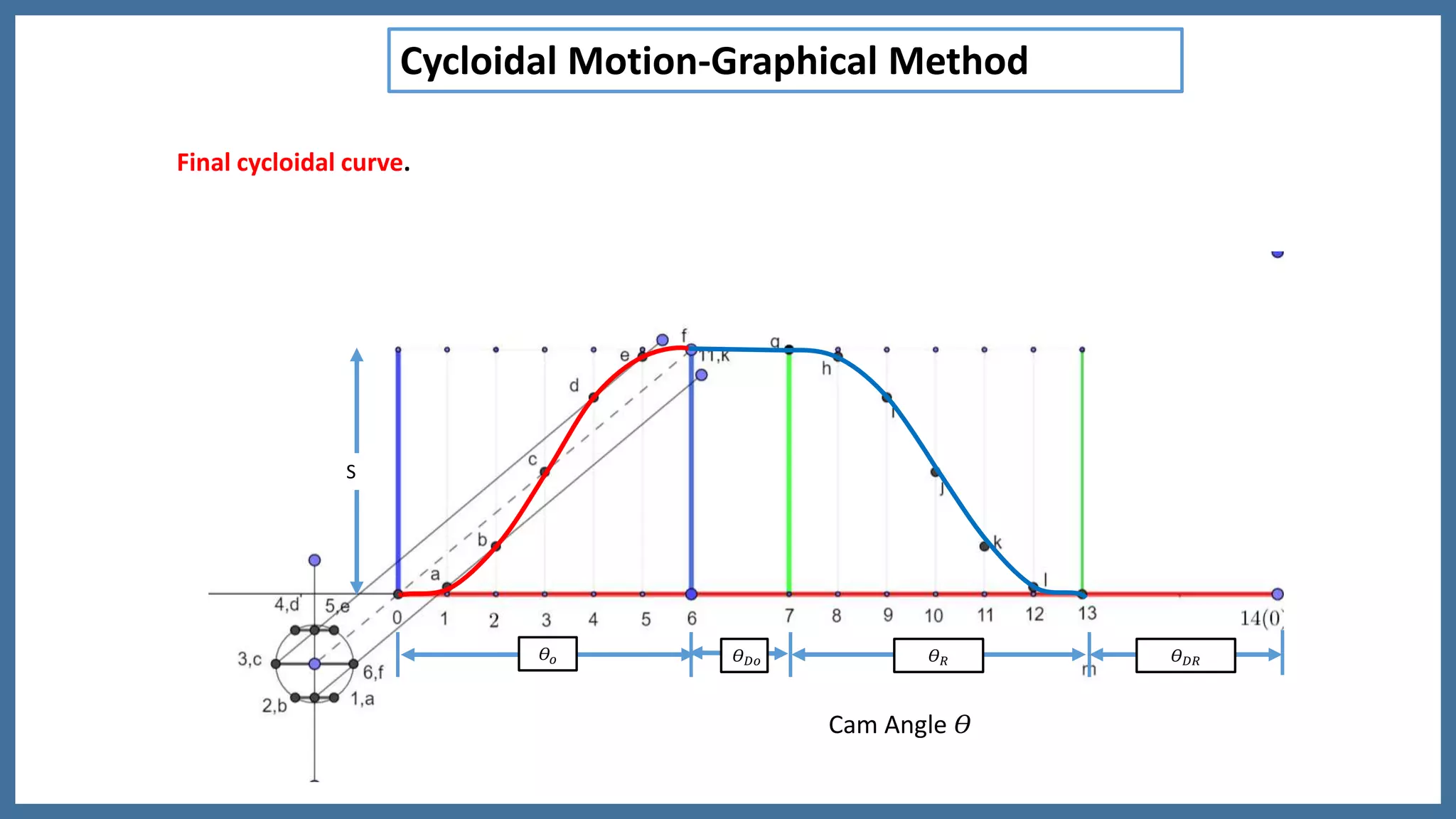


This document provides a 22 step graphical method for drawing a cycloidal cam profile. It involves dividing the cam angle into sections for the outstroke, dwell after outstroke, return stroke, and dwell after return stroke. Circles are drawn using the stroke length to determine the radius, and divided into equal parts. Parallel lines are drawn to connect the circle divisions to angular divisions on the cam base circle, and curves are drawn through the connected points to generate the cycloidal cam profile for the outstroke and return stroke sections.













































































