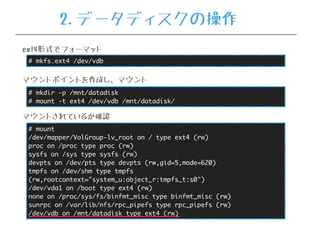
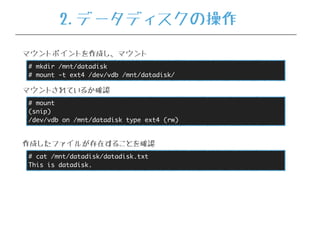
# mkfs.ext4 /dev/vdb
ext4形式でフォーマット
#mkdir -p /mnt/datadisk
# mount -t ext4 /dev/vdb /mnt/datadisk/
マウントポイントを作成し、マウント
# mount
/dev/mapper/VolGroup-lv_root on / type ext4 (rw)
proc on /proc type proc (rw)
sysfs on /sys type sysfs (rw)
devpts on /dev/pts type devpts (rw,gid=5,mode=620)
tmpfs on /dev/shm type tmpfs
(rw,rootcontext="system_u:object_r:tmpfs_t:s0")
/dev/vda1 on /boot type ext4 (rw)
none on /proc/sys/fs/binfmt_misc type binfmt_misc (rw)
sunrpc on /var/lib/nfs/rpc_pipefs type rpc_pipefs (rw)
/dev/vdb on /mnt/datadisk type ext4 (rw)
マウントされているか確認
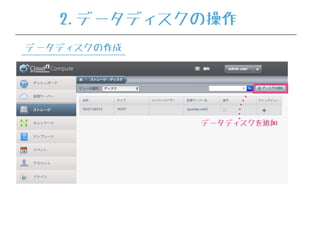
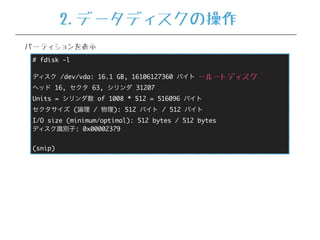
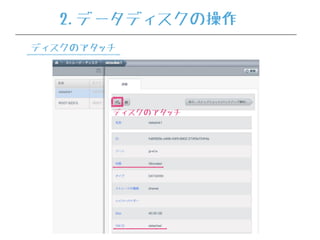
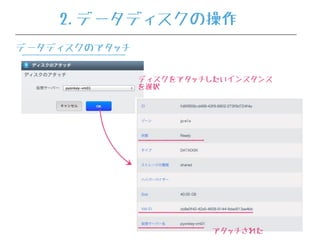
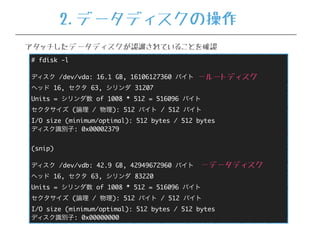
2.データディスクの操作
33.
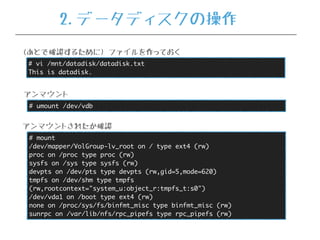
# umount /dev/vdb
アンマウント
#mount
/dev/mapper/VolGroup-lv_root on / type ext4 (rw)
proc on /proc type proc (rw)
sysfs on /sys type sysfs (rw)
devpts on /dev/pts type devpts (rw,gid=5,mode=620)
tmpfs on /dev/shm type tmpfs
(rw,rootcontext="system_u:object_r:tmpfs_t:s0")
/dev/vda1 on /boot type ext4 (rw)
none on /proc/sys/fs/binfmt_misc type binfmt_misc (rw)
sunrpc on /var/lib/nfs/rpc_pipefs type rpc_pipefs (rw)
アンマウントされたか確認
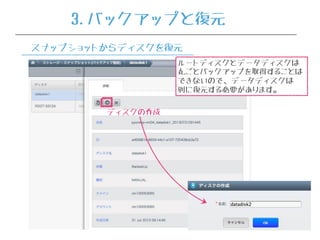
# vi /mnt/datadisk/datadisk.txt
This is datadisk.
(あとで確認するために) ファイルを作っておく
2.データディスクの操作
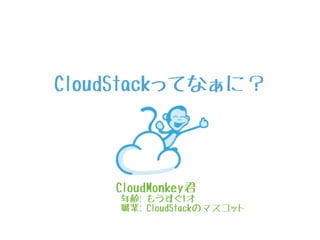




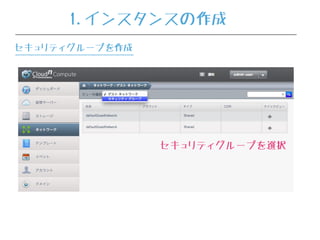


![適用するセキュリティグループ
にチェックをいれる
[注意]
インスタンスを作成時に適用した
セキュリティグループは、後から別の
セキュリティグループに変更することはできません。
1.インスタンスの作成](https://image.slidesharecdn.com/20130802osccloudstackcloudfoundary-130802003733-phpapp01/85/2013OSC-_CloudStack-CloudFoundary-19-320.jpg)
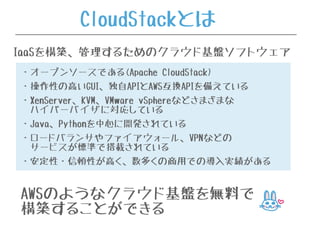
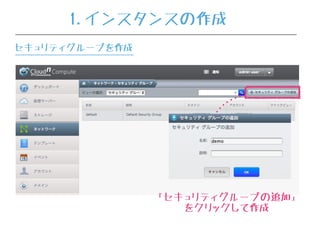
![… HA機能
… インスタンスの状態
作成したインスタンスの情報
1.インスタンスの作成
・Starting[起動中]
・Running[起動済み]
・Stopping[停止中]
・Stopped[停止済み]
・Destroyed[破棄済み]
・Expunging[削除中]
CloudStackがインスタンスの状態を監視し、
インスタンスがダウンしたことを検知した場合に、
インスタンスを別のHost上で再起動する機能](https://image.slidesharecdn.com/20130802osccloudstackcloudfoundary-130802003733-phpapp01/85/2013OSC-_CloudStack-CloudFoundary-22-320.jpg)
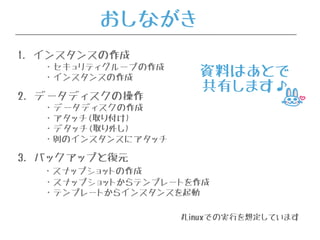
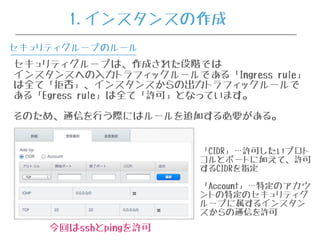
![Stop Instance/インスタンスの停止[起動時]
Reboot Instance/インスタンスの再起動[起動時]
Destroy Instance/インスタンスの破棄[起動・停止時]
Attach ISO/ISOのアタッチ[起動・停止時]
Reset Password/パスワードのリセット[起動・停止時]
Change Service/インスタンスのオファリングを変更[停止時]
Detach ISO/ISOのデタッチ[起動・停止時]
Start Instance/インスタンスの起動[停止時]
Restore Instance/インスタンスの復元[破棄済み]
View console/コンソール画面を表示[起動時]
1.インスタンスの作成
操作ボタン](https://image.slidesharecdn.com/20130802osccloudstackcloudfoundary-130802003733-phpapp01/85/2013OSC-_CloudStack-CloudFoundary-23-320.jpg)
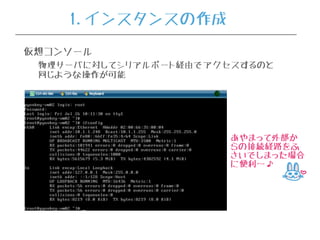
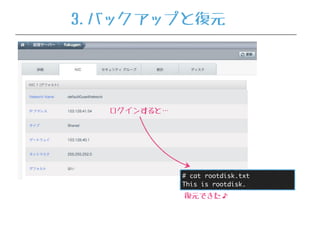
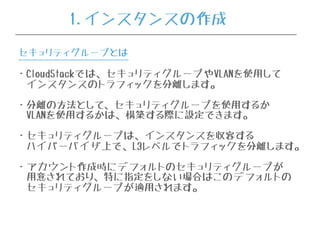
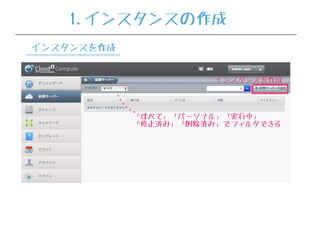
![… インスタンスのIPアドレス
% ssh root@153.128.40.116
root@153.128.40.116's password:
[root@pyonkey-vm01 ~]#
インスタンスにsshログイン
# vi rootdisk.txt
This is rootdisk.
(あとで確認するために)ファイルを作っておく
1.インスタンスの作成](https://image.slidesharecdn.com/20130802osccloudstackcloudfoundary-130802003733-phpapp01/85/2013OSC-_CloudStack-CloudFoundary-25-320.jpg)