
Recommended
More Related Content
What's hot
What's hot (20)
Similar to Tutorials questions
Similar to Tutorials questions (20)
Recently uploaded
Recently uploaded (20)
Tutorials questions
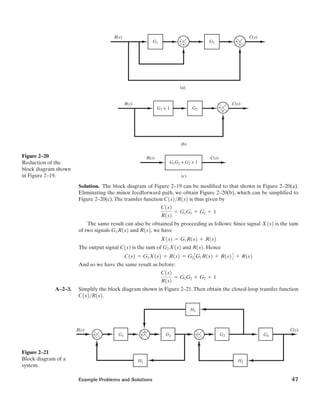
- 1. Example Problems and Solutions 47 G1 G2 R(s) C(s) G2 R(s) C(s) G1 + 1 R(s) C(s) G1G2 + G2 + 1 (a) (b) (c) + + + + + + Figure 2–20 Reduction of the block diagram shown in Figure 2–19. Solution. The block diagram of Figure 2–19 can be modified to that shown in Figure 2–20(a). Eliminating the minor feedforward path, we obtain Figure 2–20(b), which can be simplified to Figure 2–20(c).The transfer function C(s)/R(s) is thus given by The same result can also be obtained by proceeding as follows: Since signal X(s) is the sum of two signals G1R(s) and R(s), we have The output signal C(s) is the sum of G2X(s) and R(s). Hence And so we have the same result as before: A–2–3. Simplify the block diagram shown in Figure 2–21. Then obtain the closed-loop transfer function C(s)/R(s). C(s) R(s) = G1G2 + G2 + 1 C(s) = G2X(s) + R(s) = G2 CG1R(s) + R(s)D + R(s) X(s) = G1R(s) + R(s) C(s) R(s) = G1G2 + G2 + 1 G1 G2 H3 G3 G4 H2H1 + – + + + – R(s) C(s) Figure 2–21 Block diagram of a system.
- 2. 48 Chapter 2 / Mathematical Modeling of Control Systems G1 G1 G2 H3 G4 G3 G4 H2H1 + + + + + – + – R(s) R(s) C(s) C(s) H3 G1G4 G1 G2 1 + G1 G2 H1 R(s) C(s)G1 G2 G3 G4 1+ G1 G2 H1 + G3 G4 H2 – G2 G3 H3 + G1 G2 G3 G4 H1 H2 G3 G4 1 + G3 G4 H2 1 (a) (b) (c) Figure 2–22 Successive reductions of the block diagram shown in Figure 2–21. G1 Gp + + + – + + Gf C(s) D(s) R(s) E(s) U(s) H Gc Figure 2–23 Control system with reference input and disturbance input. Solution. First move the branch point between G3 and G4 to the right-hand side of the loop con- taining G3, G4, and H2. Then move the summing point between G1 and G2 to the left-hand side of the first summing point. See Figure 2–22(a). By simplifying each loop, the block diagram can be modified as shown in Figure 2–22(b). Further simplification results in Figure 2–22(c), from which the closed-loop transfer function C(s)/R(s) is obtained as A–2–4. Obtain transfer functions C(s)/R(s) and C(s)/D(s) of the system shown in Figure 2–23. Solution. From Figure 2–23 we have (2–47) (2–48) (2–49)E(s) = R(s) - HC(s) C(s) = Gp CD(s) + G1U(s)D U(s) = GfR(s) + GcE(s) C(s) R(s) = G1G2G3G4 1 + G1G2H1 + G3G4H2 - G2G3H3 + G1G2G3G4H1H2
- 3. Example Problems and Solutions 49 By substituting Equation (2–47) into Equation (2–48), we get (2–50) By substituting Equation (2–49) into Equation (2–50), we obtain Solving this last equation for C(s), we get Hence (2–51) Note that Equation (2–51) gives the response C(s) when both reference input R(s) and distur- bance input D(s) are present. To find transfer function C(s)/R(s), we let D(s)=0 in Equation (2–51).Then we obtain Similarly, to obtain transfer function C(s)/D(s), we let R(s)=0 in Equation (2–51). Then C(s)/D(s) can be given by A–2–5. Figure 2–24 shows a system with two inputs and two outputs. Derive C1(s)/R1(s), C1(s)/R2(s), C2(s)/R1(s), and C2(s)/R2(s). (In deriving outputs for R1(s), assume that R2(s) is zero, and vice versa.) C(s) D(s) = Gp 1 + G1GpGcH C(s) R(s) = G1GpAGf + GcB 1 + G1GpGcH C(s) = GpD(s) + G1GpAGf + GcBR(s) 1 + G1GpGcH C(s) + G1GpGcHC(s) = GpD(s) + G1GpAGf + GcBR(s) C(s) = GpD(s) + G1Gp EGfR(s) + Gc CR(s) - HC(s)D F C(s) = GpD(s) + G1Gp CGfR(s) + GcE(s)D G1 C1 C2 R1 R2 G3 G4 + − + − G2 Figure 2–24 System with two inputs and two outputs.
- 4. 50 Chapter 2 / Mathematical Modeling of Control Systems Solution. From the figure, we obtain (2–52) (2–53) By substituting Equation (2–53) into Equation (2–52), we obtain (2–54) By substituting Equation (2–52) into Equation (2–53), we get (2–55) Solving Equation (2–54) for C1, we obtain (2–56) Solving Equation (2–55) for C2 gives (2–57) Equations (2–56) and (2–57) can be combined in the form of the transfer matrix as follows: Then the transfer functions C1(s)/R1(s), C1(s)/R2(s), C2(s)/R1(s) and C2(s)/R2(s) can be obtained as follows: Note that Equations (2–56) and (2–57) give responses C1 and C2, respectively, when both inputs R1 and R2 are present. Notice that when R2(s)=0, the original block diagram can be simplified to those shown in Figures 2–25(a) and (b). Similarly, when R1(s)=0, the original block diagram can be simplified to those shown in Figures 2–25(c) and (d). From these simplified block diagrams we can also ob- tain C1(s)/R1(s), C2(s)/R1(s), C1(s)/R2(s), and C2(s)/R2(s), as shown to the right of each corre- sponding block diagram. C2(s) R1(s) = - G1G2G4 1 - G1G2G3G4 , C2(s) R2(s) = G4 1 - G1G2G3G4 C1(s) R1(s) = G1 1 - G1G2G3G4 , C1(s) R2(s) = - G1G3G4 1 - G1G2G3G4 B C1 C2 R = D G1 1 - G1G2G3G4 - G1G2G4 1 - G1G2G3G4 - G1G3G4 1 - G1G2G3G4 G4 1 - G1G2G3G4 T B R1 R2 R C2 = -G1G2G4R1 + G4R2 1 - G1G2G3G4 C1 = G1R1 - G1G3G4R2 1 - G1G2G3G4 C2 = G4 CR2 - G2G1AR1 - G3C2BD C1 = G1 CR1 - G3G4AR2 - G2C1BD C2 = G4AR2 - G2C1B C1 = G1AR1 - G3C2B
- 5. 60 Chapter 2 / Mathematical Modeling of Control Systems Thus Hence a linear approximation of the given nonlinear equation near the operating point is z - 30x - 72y + 243 = 0 z - 243 = 30(x - 9) + 72(y - 3) R(s) C(s) G1 G2 G3 H1 H2 H3 + – + – + – + + Figure 2–31 Block diagram of a system. B–2–1. Simplify the block diagram shown in Figure 2–29 and obtain the closed-loop transfer function C(s)/R(s). B–2–2. Simplify the block diagram shown in Figure 2–30 and obtain the closed-loop transfer function C(s)/R(s). B–2–3. Simplify the block diagram shown in Figure 2–31 and obtain the closed-loop transfer function C(s)/R(s). PROBLEMS R(s) C(s) G1 G2 G3 G4 + – + – + + Figure 2–29 Block diagram of a system. R(s) C(s) G1 G2 H1 H2 + – + + + – Figure 2–30 Block diagram of a system.
- 6. 86 Chapter 3 / Mathematical Modeling of Mechanical Systems and Electrical Systems EXAMPLE PROBLEMS AND SOLUTIONS A–3–1. Figure 3–20(a) shows a schematic diagram of an automobile suspension system.As the car moves along the road, the vertical displacements at the tires act as the motion excitation to the auto- mobile suspension system.The motion of this system consists of a translational motion of the cen- ter of mass and a rotational motion about the center of mass. Mathematical modeling of the complete system is quite complicated. A very simplified version of the suspension system is shown in Figure 3–20(b).Assuming that the motion xi at point P is the input to the system and the vertical motion xo of the body is the output,obtain the transfer function (Consider the motion of the body only in the ver- tical direction.) Displacement xo is measured from the equilibrium position in the absence of input xi. Solution. The equation of motion for the system shown in Figure 3–20(b) is or Taking the Laplace transform of this last equation, assuming zero initial conditions, we obtain Hence the transfer function Xo(s)/Xi(s) is given by Xo(s) Xi(s) = bs + k ms2 + bs + k Ams2 + bs + kBXo(s) = (bs + k)Xi(s) mx $ o + bx # o + kxo = bxi # + kxi mx $ o + bAx # o - x # iB + kAxo - xiB = 0 Xo(s)͞Xi(s). (a) k (b) xi Center of mass Auto body b P xo m Figure 3–20 (a) Automobile suspension system; (b) simplified suspension system.
- 7. Example Problems and Solutions 87 A–3–2. Obtain the transfer function Y(s)/U(s) of the system shown in Figure 3–21. The input u is a displacement input. (Like the system of Problem A–3–1, this is also a simplified version of an automobile or motorcycle suspension system.) Solution. Assume that displacements x and y are measured from respective steady-state positions in the absence of the input u. Applying the Newton’s second law to this system, we obtain Hence, we have Taking Laplace transforms of these two equations, assuming zero initial conditions, we obtain Eliminating X(s) from the last two equations, we have which yields Y(s) U(s) = k1Abs + k2B m1m2s4 + Am1 + m2Bbs3 + Ck1m2 + Am1 + m2Bk2 Ds2 + k1bs + k1k2 Am1s2 + bs + k1 + k2B m2s2 + bs + k2 bs + k2 Y(s) = Abs + k2BY(s) + k1U(s) Cm2s2 + bs + k2 DY(s) = Abs + k2BX(s) Cm1s2 + bs + Ak1 + k2BDX(s) = Abs + k2BY(s) + k1U(s) m2y $ + by # + k2y = bx # + k2x m1x $ + bx # + Ak1 + k2Bx = by # + k2y + k1u m2y $ = -k2(y - x) - b(y # - x # ) m1x $ = k2(y - x) + b(y # - x # ) + k1(u - x) y b x u m2 m1 k2 k1 Figure 3–21 Suspension system.
- 8. 88 Chapter 3 / Mathematical Modeling of Mechanical Systems and Electrical Systems A–3–3. Obtain a state-space representation of the system shown in Figure 3–22. Solution. The system equations are The output variables for this system are y1 and y2. Define state variables as Then we obtain the following equations: Hence, the state equation is and the output equation is A–3–4. Obtain the transfer function Xo(s)/Xi(s) of the mechanical system shown in Figure 3–23(a). Also obtain the transfer function Eo(s)/Ei(s) of the electrical system shown in Figure 3–23(b). Show that these transfer functions of the two systems are of identical form and thus they are analogous systems. B y1 y2 R = B 1 0 0 0 0 1 0 0 R D x1 x2 x3 x4 T D x # 1 x # 2 x # 3 x # 4 T = F 0 - k m1 0 k m2 1 - b m1 0 0 0 k m1 0 - k m2 0 0 1 0 V D x1 x2 x3 x4 T + E 0 0 0 1 m2 U u x # 4 = 1 m2 C-kAy2 - y1B + uD = k m2 x1 - k m2 x3 + 1 m2 u x # 3 = x4 x # 2 = 1 m1 C-by # 1 - kAy1 - y2B D = - k m1 x1 - b m1 x2 + k m1 x3 x # 1 = x2 x4 = y # 2 x3 = y2 x2 = y # 1 x1 = y1 m2y $ 2 + kAy2 - y1B = u m1y $ 1 + by # 1 + kAy1 - y2B = 0 m1 m2 k y1 b u y2 Figure 3–22 Mechanical system.
- 9. Example Problems and Solutions 89 Solution. In Figure 3–23(a) we assume that displacements xi, xo, and y are measured from their respective steady-state positions.Then the equations of motion for the mechanical system shown in Figure 3–23(a) are By taking the Laplace transforms of these two equations,assuming zero initial conditions,we have If we eliminate Y(s) from the last two equations, then we obtain or Hence the transfer function Xo(s)/Xi(s) can be obtained as For the electrical system shown in Figure 3–23(b), the transfer function Eo(s)/Ei(s) is found to be = AR1C1s + 1BAR2C2s + 1B AR1C1s + 1BAR2C2s + 1B + R2C1s Eo(s) Ei(s) = R1 + 1 C1s 1 A1͞R2B + C2s + R1 + 1 C1s Xo(s) Xi(s) = a b1 k1 s + 1b a b2 k2 s + 1b a b1 k1 s + 1b a b2 k2 s + 1 b + b2 k1 s Ab1s + k1BXi(s) = a b1s + k1 + b2s - b2s b2s b2s + k2 b Xo(s) b1 CsXi(s) - sXo(s)D + k1 CXi(s) - Xo(s)D = b2sXo(s) - b2s b2sXo(s) b2s + k2 b2 CsXo(s) - sY(s)D = k2Y(s) b1 CsXi(s) - sXo(s)D + k1 CXi(s) - Xo(s)D = b2 CsXo(s) - sY(s)D b2Ax # o - y # B = k2y b1Ax # i - x # oB + k1Axi - xoB = b2Ax # o - y # B (a) (b) xi xo yk2 k1 b2 b1 R2 R1 eoei C2 C1 Figure 3–23 (a) Mechanical system; (b) analogous electrical system.
- 10. 94 Chapter 3 / Mathematical Modeling of Mechanical Systems and Electrical Systems A–3–8. Obtain the transfer function of the operational-amplifier circuit shown in Figure 3–28. Solution. We will first obtain currents i1, i2, i3, i4, and i5.Then we will use node equations at nodes A and B. At node A, we have i1=i2+i3+i4, or (3–42) At node B, we get i4=i5, or (3–43) By rewriting Equation (3–42), we have (3–44) From Equation (3–43), we get (3–45) By substituting Equation (3–45) into Equation (3–44), we obtain Taking the Laplace transform of this last equation, assuming zero initial conditions, we obtain from which we get the transfer function as follows: Eo(s) Ei(s) = - 1 R1C1R2C2s2 + CR2C2 + R1C2 + AR1͞R3BR2C2 Ds + AR1͞R3B Eo(s)͞Ei(s) -C1C2R2s2 Eo(s) + a 1 R1 + 1 R2 + 1 R3 b A-R2C2BsEo(s) - 1 R3 Eo(s) = Ei(s) R1 C1 a -R2C2 d2 eo dt2 b + a 1 R1 + 1 R2 + 1 R3 b A-R2C2B deo dt = ei R1 + eo R3 eA = -R2C2 deo dt C1 deA dt + a 1 R1 + 1 R2 + 1 R3 beA = ei R1 + eo R3 eA R2 = C2 -deo dt ei - eA R1 = eA - eo R3 + C1 deA dt + eA R2 i4 = eA R2 , i5 = C2 -deo dt i1 = ei - eA R1 ; i2 = eA - eo R3 , i3 = C1 deA dt Eo(s)͞Ei(s) i1 R1 i2 i4 i3 A C1 ei eo R3 i5 C2 BR2 – + Figure 3–28 Operational- amplifier circuit.
- 11. 234 Chapter 5 / Transient and Steady-State Response Analyses The relationship between J1eq and J3eq is thus and that between b1eq and b3eq is The effect of J2 and J3 on an equivalent moment of inertia is determined by the gear ratios and For speed-reducing gear trains, the ratios, and are usually less than unity. If and then the effect of J2 and J3 on the equivalent moment of inertia J1eq is negligible. Similar comments apply to the equivalent viscous-friction coefficient b1eq of the gear train. In terms of the equivalent moment of inertia J1eq and equivalent viscous-friction coefficient b1eq, Equation (5–66) can be simplified to give where A–5–3. When the system shown in Figure 5–52(a) is subjected to a unit-step input, the system output responds as shown in Figure 5–52(b). Determine the values of K and T from the response curve. Solution. The maximum overshoot of 25.4% corresponds to z=0.4. From the response curve we have Consequently, tp = p vd = p vn 21 - z2 = p vn 21 - 0.42 = 3 tp = 3 n = N1 N2 N3 N4 J1equ $ 1 + b1equ # 1 + nTL = Tm N3͞N4 Ӷ 1,N1͞N2 Ӷ 1 N3͞N4N1͞N2N3͞N4. N1͞N2 b1eq = a N1 N2 b 2 a N3 N4 b 2 b3eq J1eq = a N1 N2 b 2 a N3 N4 b 2 J3eq + – R(s) C(s) (a) (b) c(t) 1 0 3 t 0.254 K s(Ts + 1) Figure 5–52 (a) Closed-loop system; (b) unit-step response curve.
- 12. Example Problems and Solutions 235 It follows that From the block diagram we have from which Therefore, the values of T and K are determined as A–5–4. Determine the values of K and k of the closed-loop system shown in Figure 5–53 so that the maximum overshoot in unit-step response is 25% and the peak time is 2 sec.Assume that J=1 kg-m2 . Solution. The closed-loop transfer function is By substituting J=1 kg-m2 into this last equation, we have Note that in this problem The maximum overshoot Mp is which is specified as 25%. Hence from which zp 21 - z2 = 1.386 e-zp͞21-z2 = 0.25 Mp = e-zp͞21-z2 vn = 1K , 2zvn = Kk C(s) R(s) = K s2 + Kks + K C(s) R(s) = K Js2 + Kks + K K = v2 nT = 1.142 * 1.09 = 1.42 T = 1 2zvn = 1 2 * 0.4 * 1.14 = 1.09 vn = A K T , 2zvn = 1 T C(s) R(s) = K Ts2 + s + K vn = 1.14 + – + – R(s) C(s) k 1 s K Js Figure 5–53 Closed-loop system.
- 13. 236 Chapter 5 / Transient and Steady-State Response Analyses or The peak time tp is specified as 2 sec.And so or Then the undamped natural frequency vn is Therefore, we obtain A–5–5. Figure 5–54(a) shows a mechanical vibratory system.When 2 lb of force (step input) is applied to the system, the mass oscillates, as shown in Figure 5–54(b). Determine m, b, and k of the system from this response curve.The displacement x is measured from the equilibrium position. Solution. The transfer function of this system is Since we obtain It follows that the steady-state value of x is x(q) = lim sS0 sX(s) = 2 k = 0.1 ft X(s) = 2 sAms2 + bs + kB P(s) = 2 s X(s) P(s) = 1 ms2 + bs + k k = 2zvn K = 2 * 0.404 * 1.72 2.95 = 0.471 sec K = v2 n = 1.722 = 2.95 N-m vn = vd 21 - z2 = 1.57 21 - 0.4042 = 1.72 vd = 1.57 tp = p vd = 2 z = 0.404 k b x (a) (b) P(2-lb force) x(t) ft 0.1 0 1 2 3 4 5 t 0.0095 ftm Figure 5–54 (a) Mechanical vibratory system; (b) step-response curve.
- 14. Example Problems and Solutions 237 Hence Note that Mp=9.5% corresponds to z=0.6.The peak time tp is given by The experimental curve shows that tp=2 sec.Therefore, Since v2 n=k͞m=20͞m, we obtain (Note that 1 slug=1 lbf-sec2 ͞ft.) Then b is determined from or A–5–6. Consider the unit-step response of the second-order system The amplitude of the exponentially damped sinusoid changes as a geometric series. At time t=tp=p͞vd, the amplitude is equal to After one oscillation, or at t=tp+2p͞d=3p͞vd, the amplitude is equal to after another cycle of oscillation, the amplitude is The logarithm of the ratio of successive amplitudes is called the logarithmic decrement.Determine the logarithmic decrement for this second-order system.Describe a method for experimental determination of the damping ratio from the rate of decay of the oscillation. Solution. Let us define the amplitude of the output oscillation at t=ti to be xi, where ti=tp+(i-1)T(T=period of oscillation). The amplitude ratio per one period of damped oscillation is Thus, the logarithmic decrement d is It is a function only of the damping ratio z. Thus, the damping ratio z can be determined by use of the logarithmic. decrement. In the experimental determination of the damping ratio z from the rate of decay of the oscil- lation, we measure the amplitude x1 at t=tp and amplitude xn at t=tp+(n-1)T. Note that it is necessary to choose n large enough so that the ratio x1/xn is not near unity.Then x1 xn = e(n-1)2zp͞21-z2 d = ln x1 x2 = 2zp 21 - z2 x1 x2 = e-As͞vdBp e-As͞vdB3p = e2As͞vdBp = e2zp͞21-z2 e-As͞vdB5p . e-As͞vdB3p ; e-As͞vdBp . C(s) R(s) = v2 n s2 + 2zvns + v2 n b = 2zvnm = 2 * 0.6 * 1.96 * 5.2 = 12.2 lbf͞ft͞sec 2zvn = b m m = 20 v2 n = 20 1.962 = 5.2 slugs = 167 lb vn = 3.14 2 * 0.8 = 1.96 rad͞sec tp = p vd = p vn 21 - z2 = p 0.8vn k = 20 lbf͞ft
- 15. 238 Chapter 5 / Transient and Steady-State Response Analyses or Hence A–5–7. In the system shown in Figure 5–55, the numerical values of m, b, and k are given as m=1 kg, b=2 N-sec͞m, and k=100 N͞m. The mass is displaced 0.05 m and released without initial ve- locity.Find the frequency observed in the vibration.In addition,find the amplitude four cycles later. The displacement x is measured from the equilibrium position. Solution. The equation of motion for the system is Substituting the numerical values for m, b, and k into this equation gives where the initial conditions are x(0)=0.05 and From this last equation the undamped natural frequency vn and the damping ratio z are found to be The frequency actually observed in the vibration is the damped natural frequency vd. In the present analysis, is given as zero.Thus, solution x(t) can be written as It follows that at t=nT, where T=2p͞vd, Consequently, the amplitude four cycles later becomes A–5–8. Obtain both analytically and computationally the unit-step response of tbe following higher-order system: [Obtain the partial-fraction expansion of C(s) with MATLAB when R(s) is a unit-step function.] C(s) R(s) = 3s3 + 25s2 + 72s + 80 s4 + 8s3 + 40s2 + 96s + 80 = 0.05e-2.526 = 0.05 * 0.07998 = 0.004 m x(4T) = x(0)e-zvn4T = x(0)e-(0.1)(10)(4)(0.6315) x(nT) = x(0)e-zvnnT x(t) = x(0)e-zvnt a cos vdt + z 21 - z2 sinvdt b x # (0) vd = vn 21 - z2 = 1011 - 0.01 = 9.95 rad͞sec vn = 10, z = 0.1 x # (0) = 0. x $ + 2x # + 100x = 0 mx $ + bx # + kx = 0 z = 1 n - 1 a ln x1 xn b B 4p2 + c 1 n - 1 aln x1 xn b d 2 ln x1 xn = (n - 1) 2zp 21 - z2 k m b x Figure 5–55 Spring-mass-damper system.
- 16. Example Problems and Solutions 239 Solution. MATLAB Program 5–18 yields the unit-step response curve shown in Figure 5–56. It also yields the partial-fraction expansion of C(s) as follows: - 0.4375 s + 2 - 0.375 (s + 2)2 + 1 s = -0.5626(s + 2) (s + 2)2 + 42 + (0.3438) * 4 (s + 2)2 + 42 + -0.4375 s + 2 + -0.375 (s + 2)2 + 1 s = -0.2813 - j0.1719 s + 2 - j4 + -0.2813 + j0.1719 s + 2 + j4 C(s) = 3s3 + 25s2 + 72s + 80 s4 + 8s3 + 40s2 + 96s + 80 1 s MATLAB Program 5–18 % ------- Unit-Step Response of C(s)/R(s) and Partial-Fraction Expansion of C(s) ------- num = [3 25 72 80]; den = [1 8 40 96 80]; step(num,den); v = [0 3 0 1.2]; axis(v), grid % To obtain the partial-fraction expansion of C(s), enter commands % num1 = [3 25 72 80]; % den1 = [1 8 40 96 80 0]; % [r,p,k] = residue(num1,den1) num1 = [25 72 80]; den1 = [1 8 40 96 80 0]; [r,p,k] = residue(num1,den1) r = -0.2813- 0.1719i -0.2813+ 0.1719i -0.4375 -0.3750 1.0000 p = -2.0000+ 4.0000i -2.0000- 4.0000i -2.0000 -2.0000 0 k = []
- 17. Example Problems and Solutions 251 Solution. A possible MATLAB program based on Equations (5–58) and (5–60) is given by MAT- LAB program 5–26.The response curve obtained here is shown in Figure 5–65. (Notice that this problem was solved by use of the command“initial”in Example 5–16.The response curve obtained here is exactly the same as that shown in Figure 5–34.) MATLAB Program 5–26 t = 0:0.05:10; A = [0 1 0;0 0 1;-10 -17 -8]; B = [2;1;0.5]; C=[1 0 0]; [y,x,t] = step(A,B,C*A,C*B,1,t); plot(t,y) grid; title('Response to Initial Condition') xlabel('t (sec)') ylabel('Output y') A–5–17. Consider the following characteristic equation: Determine the range of K for stability. Solution. The Routh array of coefficients is s4 s3 s2 s1 s0 1 K K - 1 K 1 - K2 K - 1 1 1 1 1 1 0 s4 + Ks3 + s2 + s + 1 = 0 Figure 5–65 Response y(t) to the given initial condition. Outputy t (sec) Response to Initial Condition 0.5 1 1.5 2 2.5 0 0 1 2 3 4 5 6 7 8 9 10
- 18. 252 Chapter 5 / Transient and Steady-State Response Analyses For stability, we require that From the first and second conditions, K must be greater than 1. For K>1, notice that the term 1-CK2 /(K-1)D is always negative, since Thus, the three conditions cannot be fulfilled simultaneously.Therefore, there is no value of K that allows stability of the system. A–5–18. Consider the characteristic equation given by (5–67) The Hurwitz stability criterion, given next, gives conditions for all the roots to have negative real parts in terms of the coefficients of the polynomial.As stated in the discussions of Routh’s stability criterion in Section 5–6, for all the roots to have negative real parts, all the coefficients a’s must be positive.This is a necessary condition but not a sufficient condition. If this condition is not sat- isfied, it indicates that some of the roots have positive real parts or are imaginary or zero.A suf- ficient condition for all the roots to have negative real parts is given in the following Hurwitz stability criterion: If all the coefficients of the polynomial are positive, arrange these coefficients in the following determinant: where we substituted zero for as if s>n. For all the roots to have negative real parts, it is neces- sary and sufficient that successive principal minors of be positive. The successive principal minors are the following determinants: where as=0 if s>n. (It is noted that some of the conditions for the lower-order determinants are included in the conditions for the higher-order determinants.) If all these determinants are positive, and a0>0 as already assumed, the equilibrium state of the system whose characteristic ¢i = 5 a1 a0 0 и 0 a3 a2 a1 и 0 p p p p a2i-1 a2i-2 a2i-3 и ai 5 (i = 1, 2, p , n - 1) ¢n ¢n = 7 a1 a0 0 0 и и 0 a3 a2 a1 a0 и и 0 a5 a4 a3 a2 и и 0 p p p p p 0 и an an-1 an-2 an-3 an-4 0 и 0 0 an an-1 an-2 0 и 0 0 0 0 an 7 a0sn + a1sn-1 + a2sn-2 + p + an-1s + an = 0 K - 1 - K2 K - 1 = -1 + K(1 - K) K - 1 6 0 K 7 0 K - 1 K 7 0 1 - K2 K - 1 7 0
- 19. Example Problems and Solutions 257 From this analysis, we see that The Hurwitz conditions for asymptotic stability reduce to the conditions The Routh array for the polynomial where a0>0 and n=4, is given by From this Routh array, we see that (The last equation is obtained using the fact that ) Hence the Hurwitz conditions for asymptotic stability become Thus we have demonstrated that Hurwitz conditions for asymptotic stability can be reduced to Routh’s conditions for asymptotic stability. The same argument can be extended to Hurwitz determinants of any order, and the equivalence of Routh’s stability criterion and Hurwitz stabil- ity criterion can be established. A–5–21. Consider the characteristic equation Using the Hurwitz stability criterion, determine the range of K for stability. Solution. Comparing the given characteristic equation s4 + 2s3 + (4 + K)s2 + 9s + 25 = 0 s4 + 2s3 + (4 + K)s2 + 9s + 25 = 0 a1 7 0, b1 7 0, c1 7 0, d1 7 0 a34 = 0, aˆ44 = a4, and a4 = b2 = d1. a44 = aˆ44 - aˆ43 a33 a34 = a4 = d1 a33 = a3 - a1 a22 a23 = a3b1 - a1b2 b1 = c1 a22 = a2 - a0 a1 a3 = b1 a11 = a1 a0 a1 b1 c1 d1 a2 a3 b2 a4 a0s4 + a1s3 + a2s2 + a3s + a4 = 0 a11 7 0, a22 7 0, a33 7 0, a44 7 0, p ¢1 7 0, ¢2 7 0, ¢3 7 0, ¢4 7 0, p ¢1 = a11 ¢2 = a11a22 ¢3 = a11a22a33 ¢4 = a11a22a33a44
- 20. 258 Chapter 5 / Transient and Steady-State Response Analyses with the following standard fourth-order characteristic equation: we find The Hurwitz stability criterion states that is given by For all the roots to have negative real parts, it is necessary and sufficient that succesive principal minors of be positive.The successive principal minors are For all principal minors to be positive, we require that be positive.Thus, we require from which we obtain the region of K for stability to be A–5–22. Explain why the proportional control of a plant that does not possess an integrating property (which means that the plant transfer function does not include the factor 1/s) suffers offset in response to step inputs. Solution. Consider, for example, the system shown in Figure 5–66.At steady state, if c were equal to a nonzero constant r, then e=0 and u=Ke=0, resulting in c=0, which contradicts the assumption that c=r=nonzero constant. A nonzero offset must exist for proper operation of such a control system. In other words, at steady state, if e were equal to r/(1+K), then u=Kr/(1+K) and c=Kr/(1+K), which results in the assumed error signal e=r/(1+K).Thus the offset of r/(1+K) must exist in such a system. K 7 109 18 18K - 109 7 0 2K - 1 7 0 ¢i(i = 1, 2, 3) ¢3 = 3 a1 a0 0 a3 a2 a1 0 a4 a3 3 = 3 2 1 0 9 4 + K 2 0 25 9 3 = 18K - 109 ¢2 = 2 a1 a0 a3 a2 2 = 2 2 1 9 4 + K 2 = 2K - 1 ¢1 = @a1 @ = 2 ¢4 ¢4 = 4 a1 a0 0 0 a3 a2 a1 a0 0 a4 a3 a2 0 0 0 a4 4 ¢4 a0 = 1, a1 = 2, a2 = 4 + K, a3 = 9, a4 = 25 a0s4 + a1s3 + a2s2 + a3s + a4 = 0 + – r ce u K 1 Ts + 1 Figure 5–66 Control system.
- 21. © 2010 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
- 22. © 2010 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
- 23. © 2010 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
- 24. © 2010 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
- 25. © 2010 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
- 26. © 2010 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
- 27. © 2010 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
- 28. © 2010 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
- 29. © 2010 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
- 30. © 2010 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
- 31. © 2010 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
- 32. © 2010 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
- 33. © 2010 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
- 34. © 2010 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
- 35. © 2010 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.
- 36. © 2010 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from the publisher prior to any prohibited reproduction, storage in a retrieval system, or transmission in any form or by any means, electronic, mechanical, photocopying, recording, or likewise. For information regarding permission(s), write to: Rights and Permissions Department, Pearson Education, Inc., Upper Saddle River, NJ 07458.