Download to read offline



![User Interface Analysis
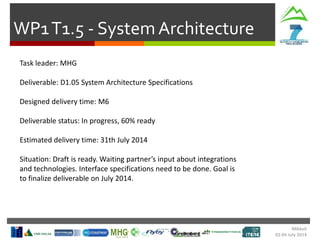
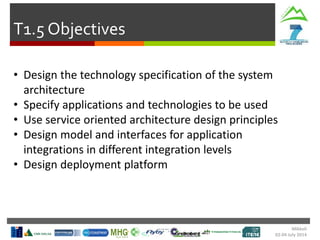
Technical Meeting
2-4/Jul/2014
“Human-Machine Interfaces can be seen as the parts, software or
hardware handling the interaction between humans and machines
[…] Computer can have several different purposes ending in an
open-ended dialog between users and computer.”](https://image.slidesharecdn.com/02technicalmeetingmay2014-wp1-161024095320/85/1st-Technical-Meeting-WP1-26-320.jpg)
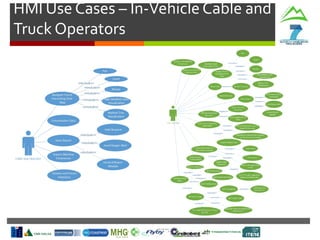








- Weather - Production Targets - Contingency Plans Harvesting Head Control Interface Production Statistics Machine Parameters Tree Detection & Recognition SLOPE In-Vehicle Interface Machine Monitoring Route Planning Cable Crane Control Risks and Mitigation Actions Technical Meeting 2-4/Jul/2014 Risks: - Integration with existing systems (MHG, TREE) not seamless - Mobile/In-Vehicle interfaces not robust enough for field conditions - User acceptance of new interfaces Mitigation Actions: - Early prototyping and testing with end users - Modular design allowing independent development





































































































