Downloaded 470 times
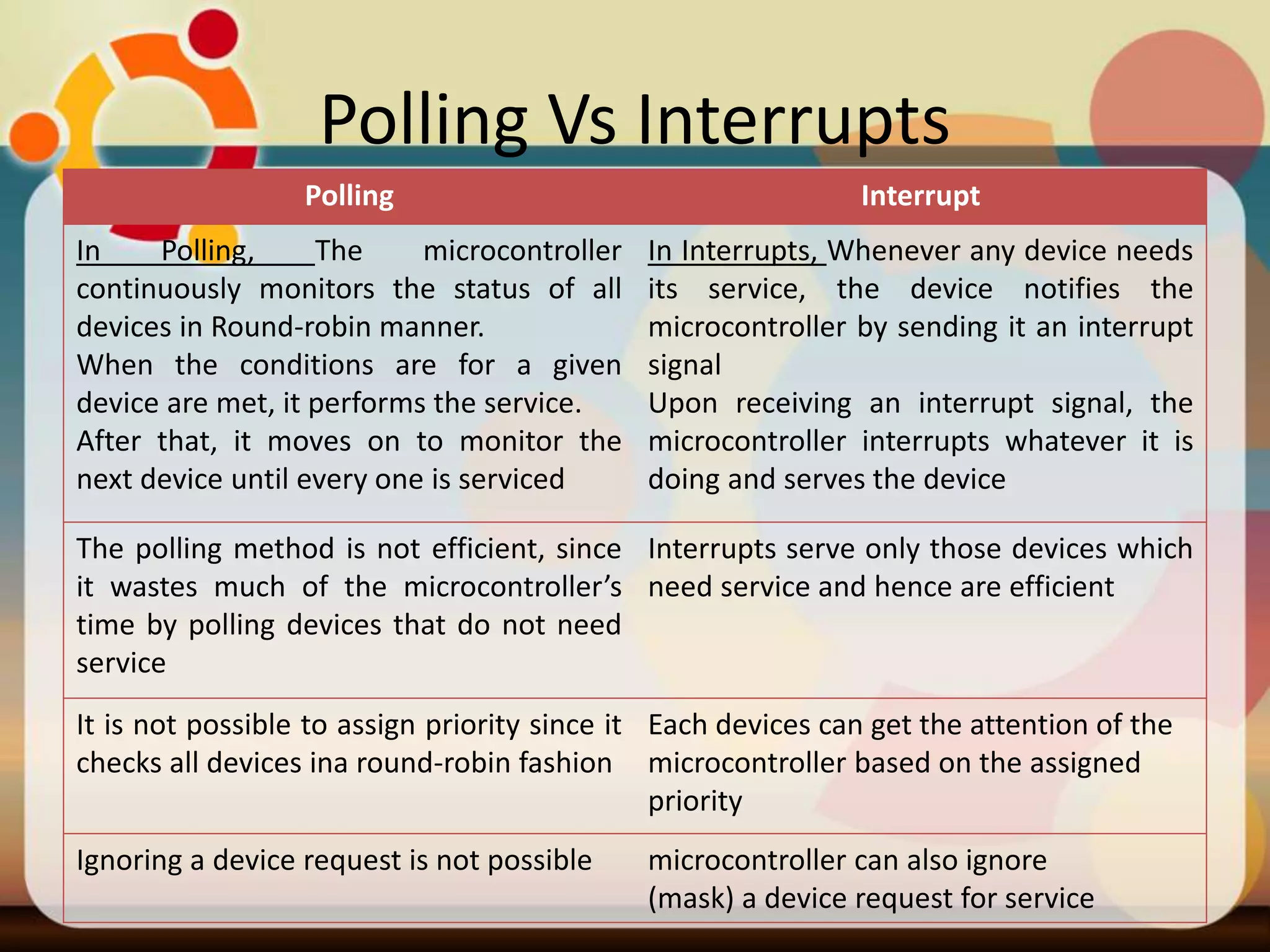

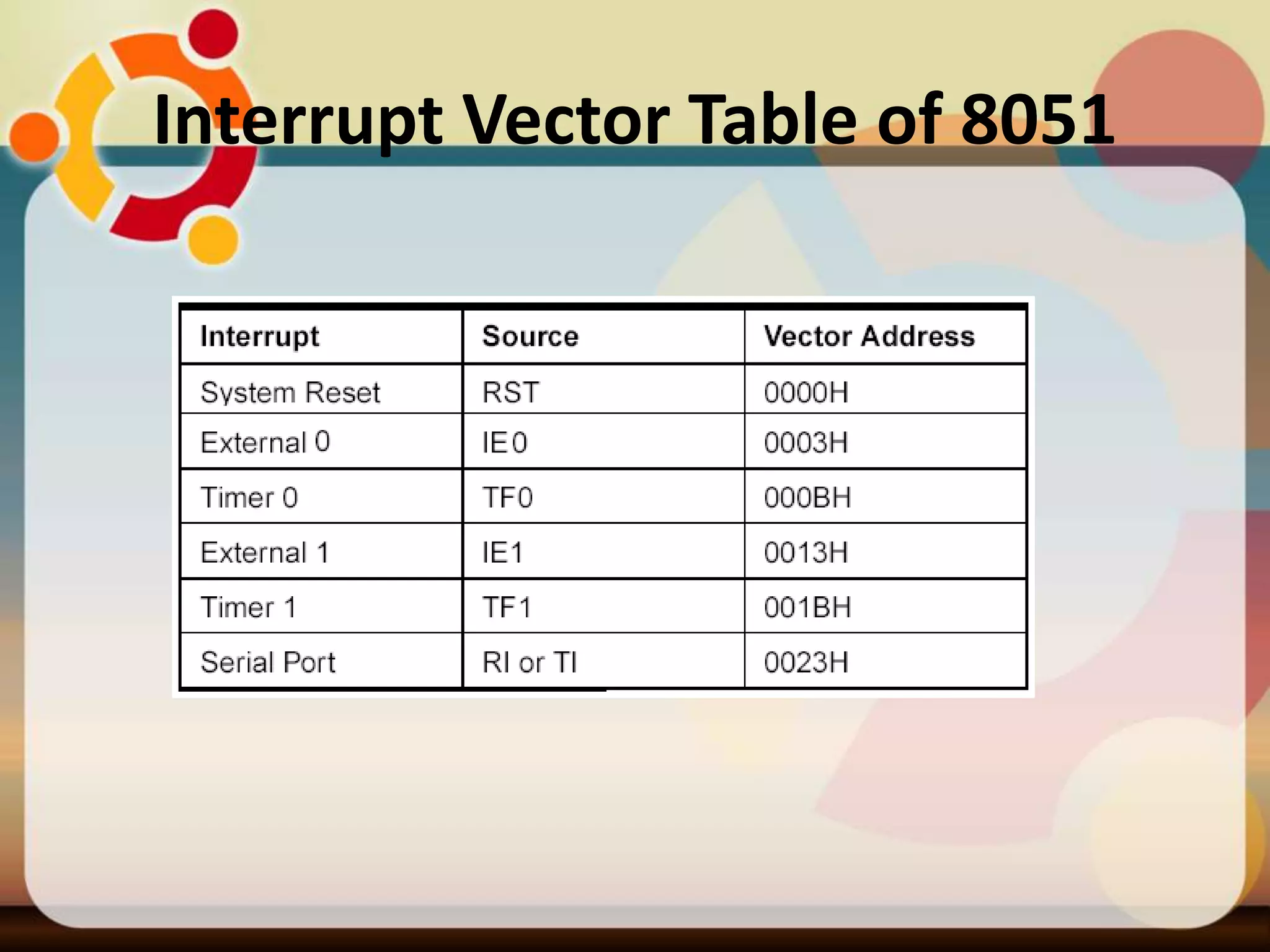
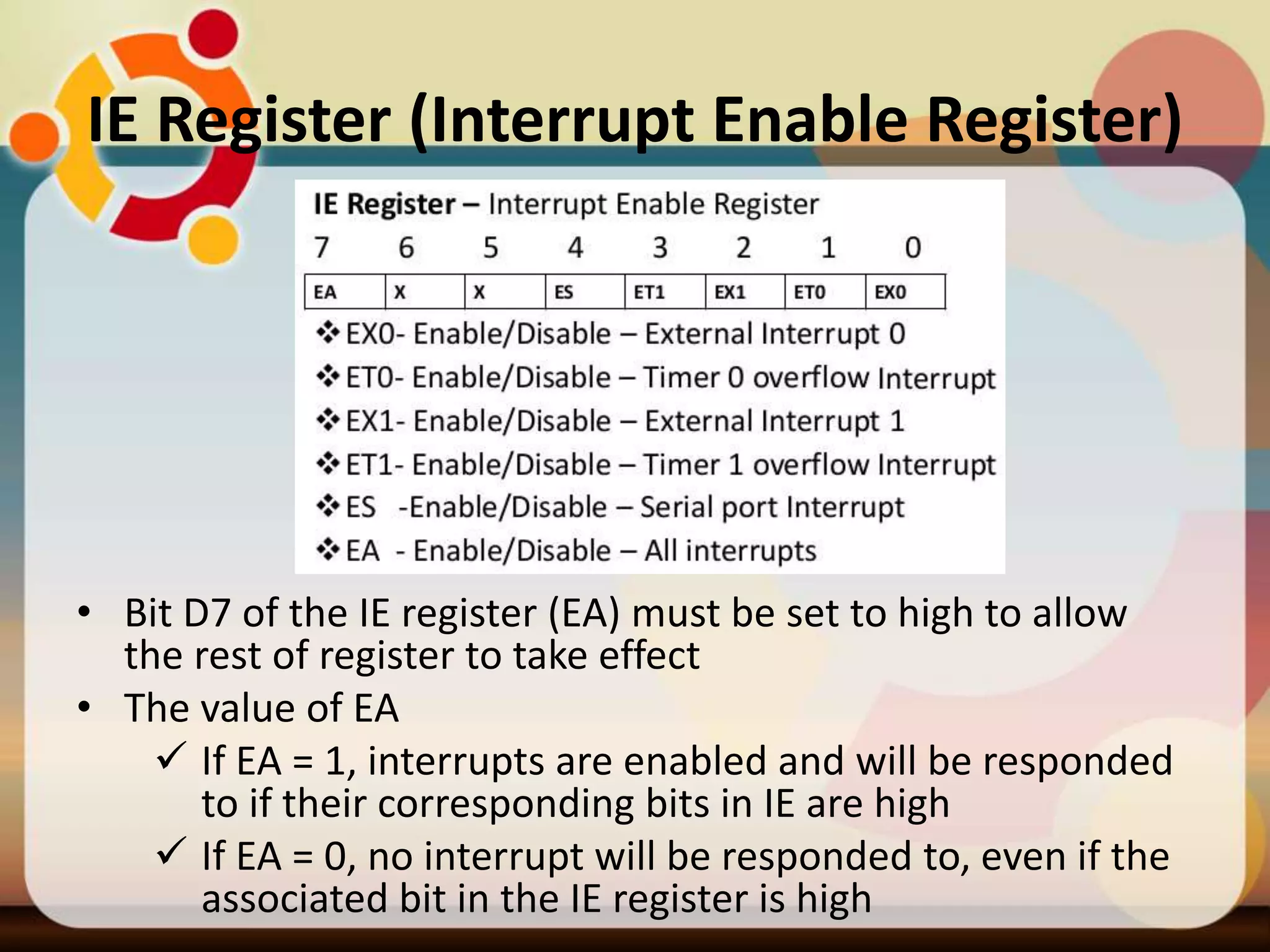
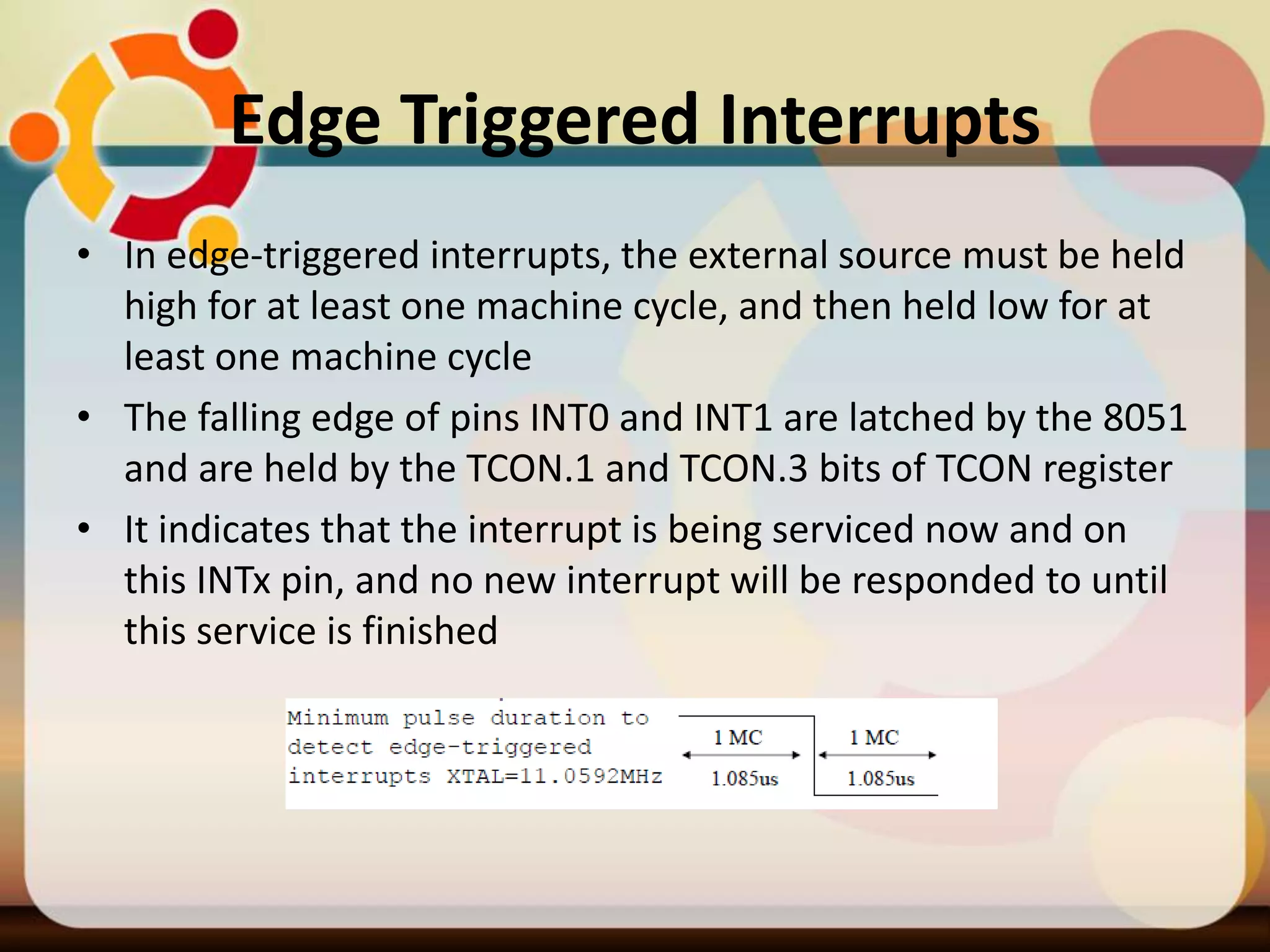
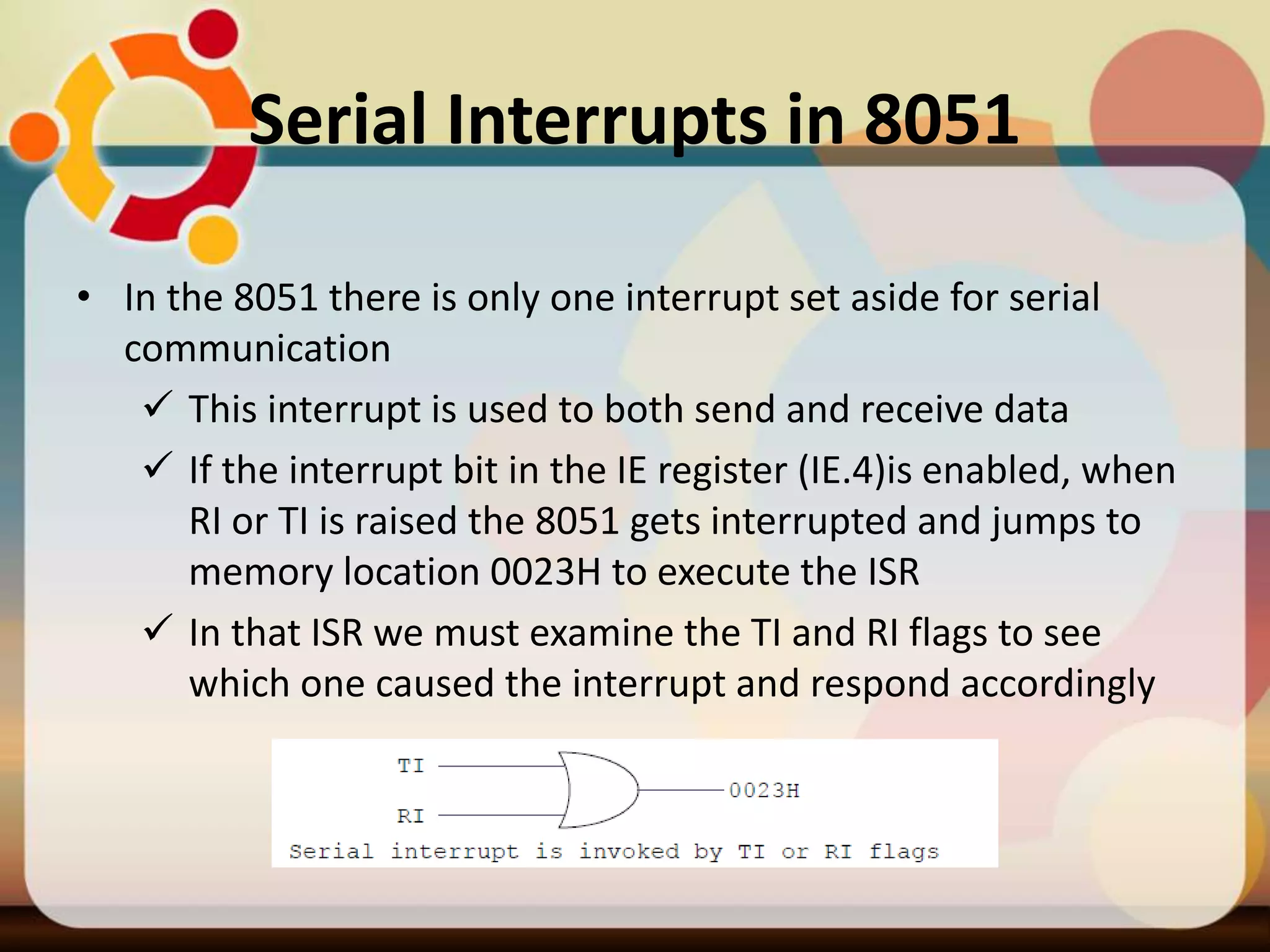
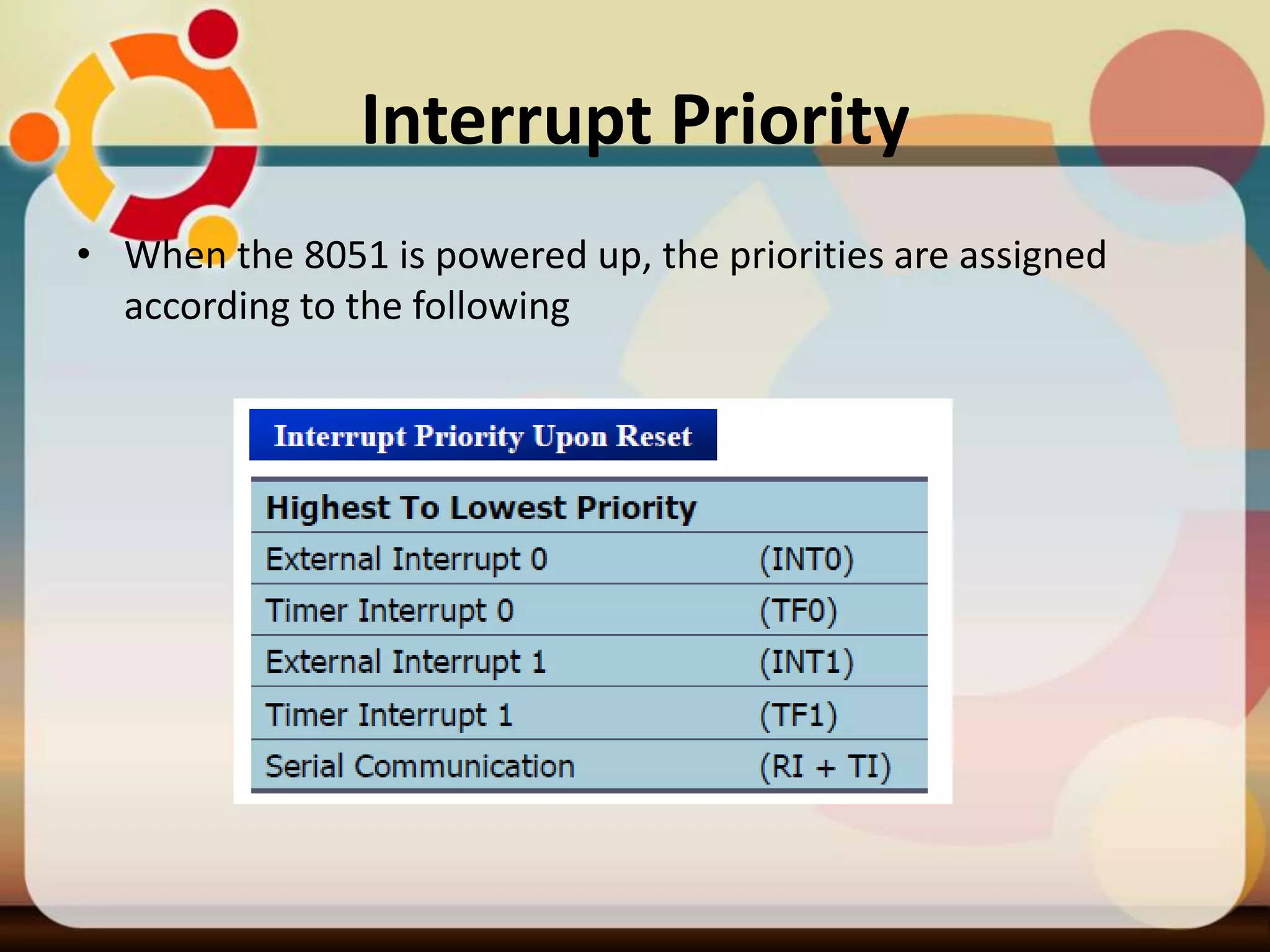
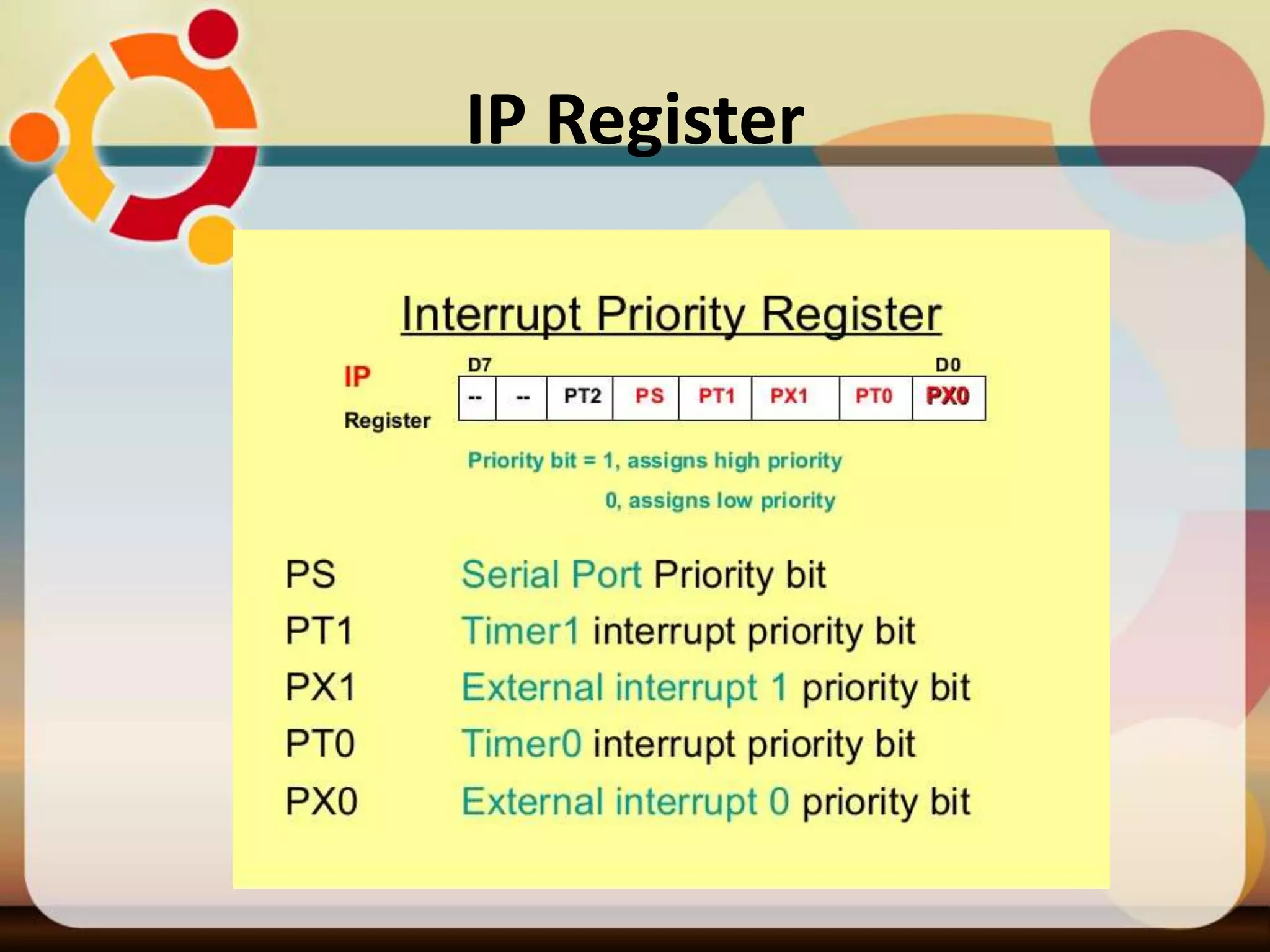

The document explains the functioning of interrupts in the 8051 microcontroller, differentiating between polling and interrupt-driven methods. It outlines various types of interrupts including vectored, non-vectored, maskable, and non-maskable, as well as the steps for executing an interrupt and handling external hardware interrupts. Additionally, it discusses serial communication interrupts and the priorities assigned to these interrupts within the microcontroller's architecture.