Downloaded 747 times




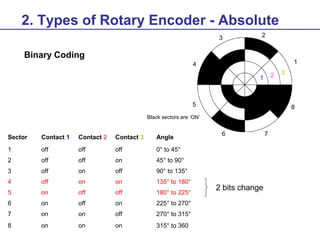

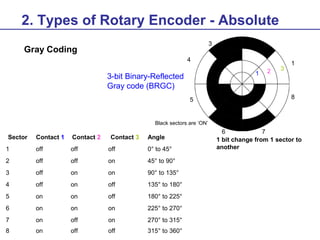

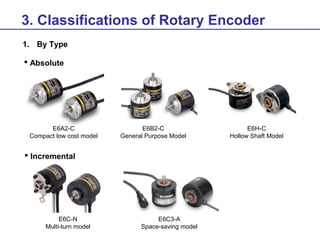
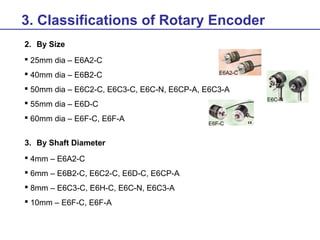
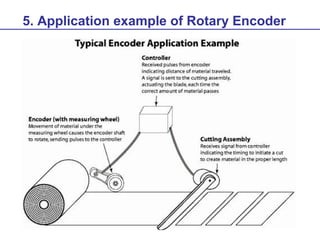
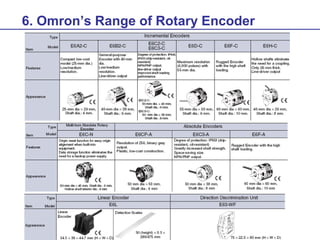

Rotary encoders convert the angular position of a shaft into a digital code. There are two main types: incremental encoders provide position feedback through a series of pulses, while absolute encoders provide a unique code for each position. Encoders are classified based on features like type, size, resolution, speed, and output. Proper selection depends on factors like required precision, load, frequency response, and environmental protection. Omron offers a range of rotary encoders to meet different application needs.