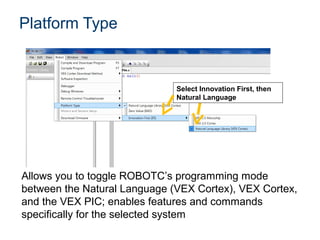
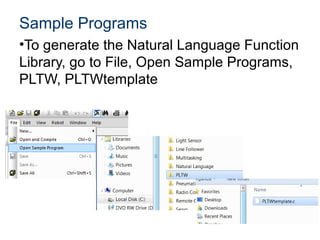
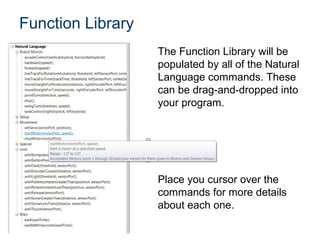
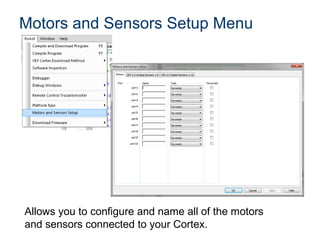
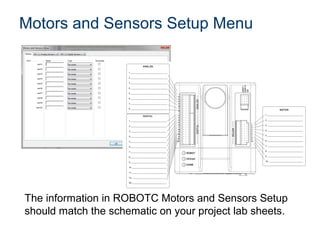
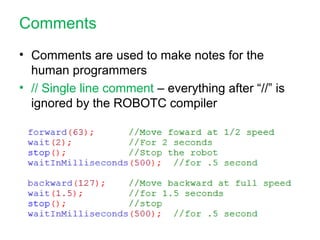
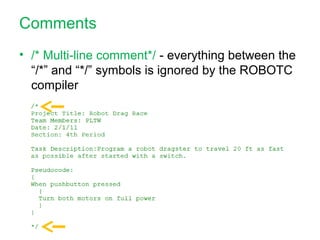
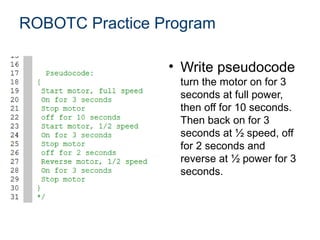
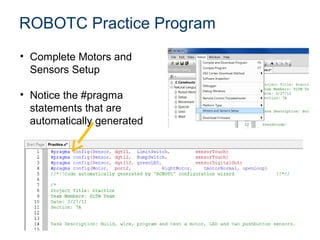
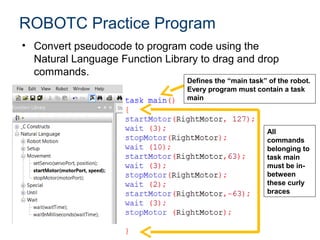
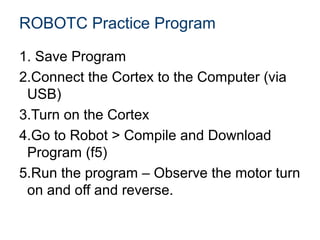
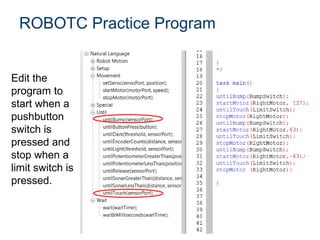
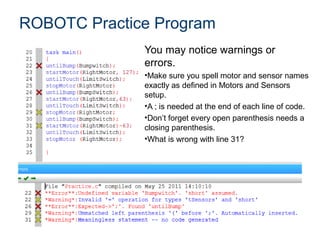
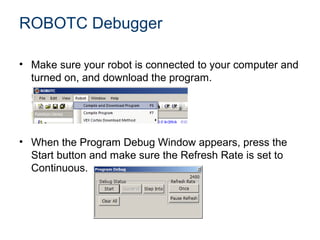
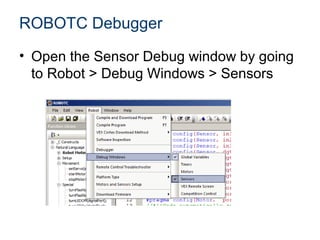
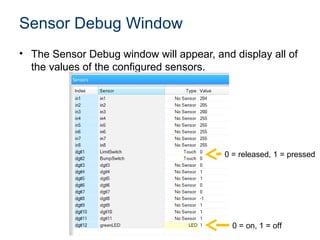
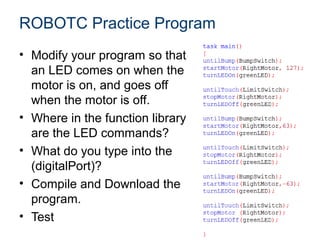
This document provides an introduction and overview of the ROBOTC programming environment. It discusses key aspects like selecting the platform type, downloading programs, using sample programs and function libraries, configuring motors and sensors, writing comments, and debugging programs. It also provides resources for learning more about ROBOTC programming and robotics competitions. The document guides users through writing a basic ROBOTC practice program that controls a motor and adds LED feedback.