
![28
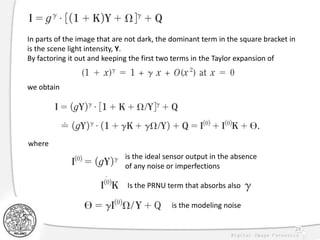
I[i] the quantized signal registered at pixel i
Y[i] is the incident light intensity at pixel i
pixel indices have been dropped for better readability
g is the gain factor (different for each color channel) and is the gamma
correction factor (typically < 0.45)
The matrix K is a zero-mean noiselike signal responsible
for the PRNU K is the sensor fingerprint.
is a combination of the other noise sources
Q is the combined distortion due to quantization and/or JPEG compression](https://image.slidesharecdn.com/forestierizinetti-imageforensicspresentazione-121107112900-phpapp02/85/Digital-Image-Forensics-camera-fingerprint-and-its-robustness-28-320.jpg)
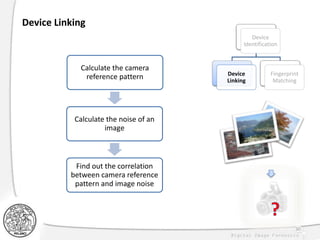

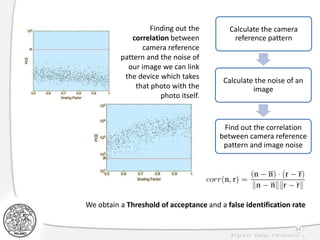



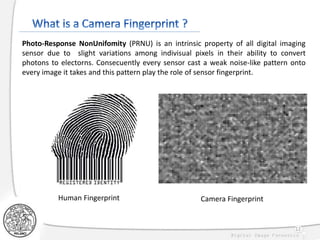
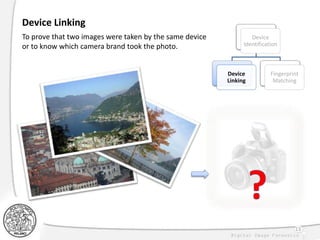
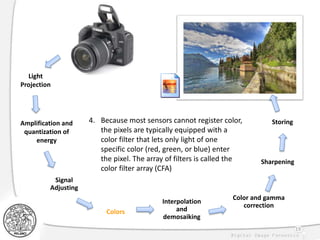
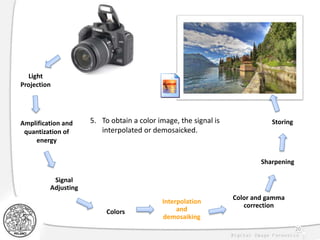
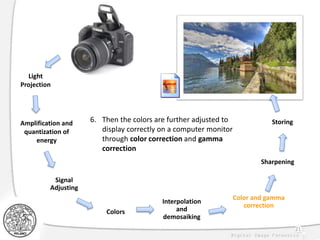
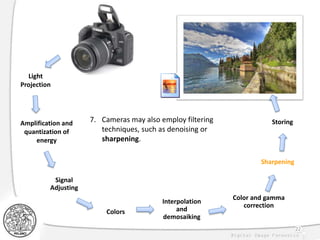
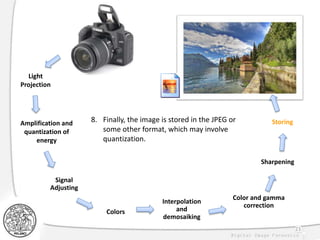
1. The document discusses camera fingerprint analysis, which is used in digital forensics to identify the source device of digital images. 2. It explains that each image sensor has a unique photo response non-uniformity (PRNU) pattern that is imprinted onto every image taken, acting as a sensor fingerprint. 3. The process of linking devices involves calculating a camera reference pattern from multiple images, extracting the noise pattern from a target image, and finding the correlation between the reference pattern and target noise to determine if they match.