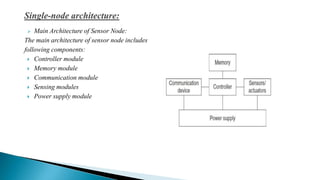
The document discusses the hardware components and architecture of sensor nodes. It describes the main components as the controller module, memory module, communication module, sensing modules, and power supply module. The controller is the core and processes data from sensors. Memory stores programs and data. The communication device allows nodes to exchange data wirelessly. Sensors interface with the physical environment. Power is stored and replenished through batteries or energy scavenging from the environment. TinyOS was developed as an operating system for sensor networks since traditional OSes were not suitable due to constraints like limited memory and power.