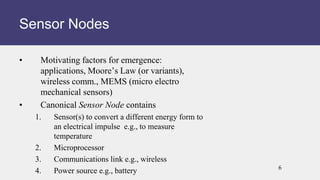
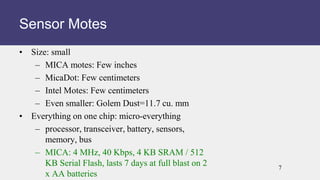
This document summarizes a lecture on sensors and sensor networks. It discusses the components and characteristics of sensor nodes, including small size, limited processing, communication and power capabilities. It describes the TinyOS operating system developed for sensor networks, which uses an event-driven programming model and supports power saving modes. It notes that transmitting data via radio is very expensive, so techniques like data aggregation are important for conserving power in sensor networks.
![• Micro-sensors (MEMS, Materials, Circuits)
– acceleration, vibration, sound, gyroscope, tilt,
magnetic, motion, pressure, temp, light, moisture,
humidity, barometric
• Chemical
– CO, CO2, radon
• Biological
– pathogen detectors
• [In some cases, actuators too (mirrors, motors,
smart surfaces, micro-robots) ]
Types of Sensors
8](https://image.slidesharecdn.com/l26-240202012417-8c37b1b2/85/L26-B-FA20-ppt-8-320.jpg)