Downloaded 60 times



![PCL Structure:
9/37
Point Types in PCL:
• PointXYZ - Members: float x, y, z; most used.
• PointXYZI - Members: float x, y, z, intensity; Simple XYZ + intensity.
• PointXYZRGBA - Members: float x, y, z; uint32_t rgba; RGBA information packed into a
single integer.
• PointXYZRGB - float x, y, z, rgb; RGBA information packed into a float.
• PointNormal - float x, y, z; float normal[3], curvature; surface normals and curvatures.
• ……..
• Not enough! Defining your own custom PointT type.](https://image.slidesharecdn.com/pcl-180329173749/85/PCL-Point-Cloud-Library-11-320.jpg)
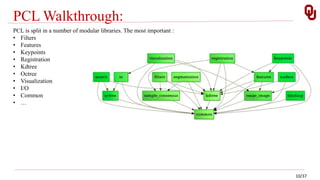
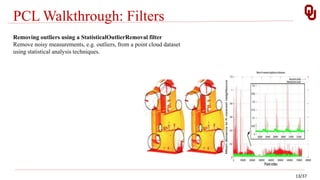
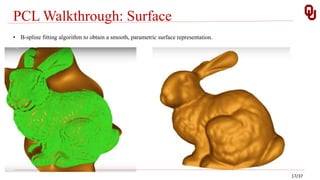
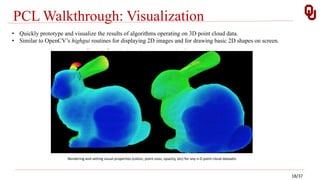
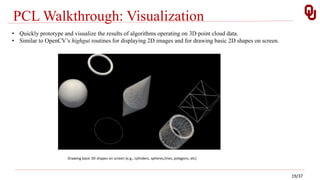
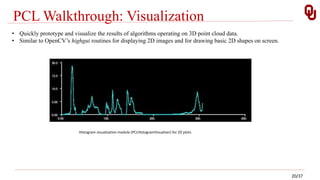
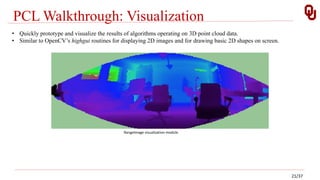
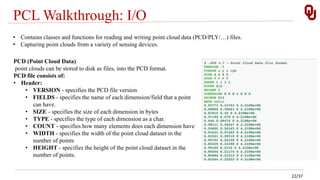
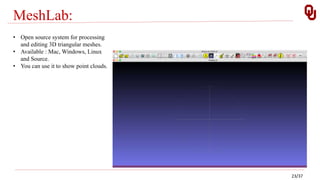

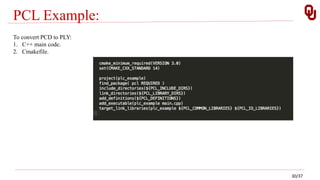

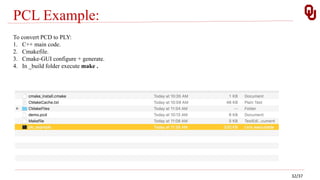
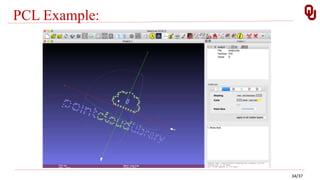

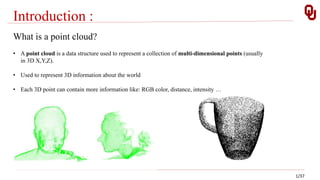
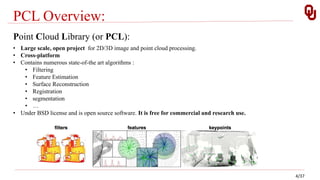
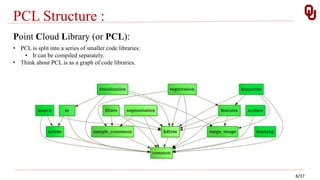
The document provides an overview of the Point Cloud Library (PCL), an open-source library for point cloud processing. PCL contains algorithms for filtering, segmentation, registration, surface reconstruction and more. It has a modular structure with libraries for filters, features, keypoints, visualization and I/O. PCL data can be read from and written to various file formats like PCD and PLY. It also integrates with MeshLab for point cloud visualization. Examples are given to demonstrate converting a PCD file to PLY format using PCL.















![ViT (Vision Transformer) Review [CDM]](https://cdn.slidesharecdn.com/ss_thumbnails/vitreviewcdm-201012184226-thumbnail.jpg?width=640&height=640&fit=bounds)