Download as PDF, PPTX

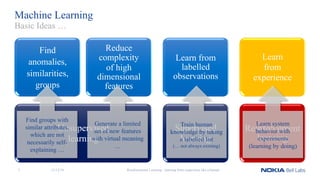


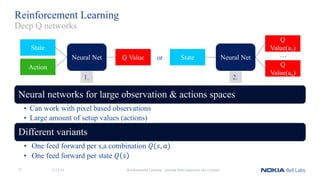
![Reinforcement Learning
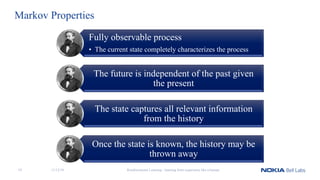
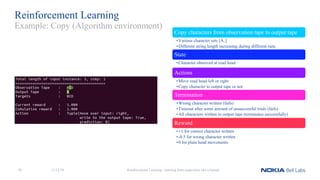
Observability
• Full: Sa
t = Se
t
• Partial: Sa
t ≠ Se
t
Agent functions
• Policy (predicted action based on state)
• a = 𝜋(𝑠)
• Value (pred. of future reward)
• vπ(s, a) = 𝐸 𝜋[𝑅𝑡 + 1,
𝑅 𝑡 + 2 …
]
• Model
• Build transition model of the system
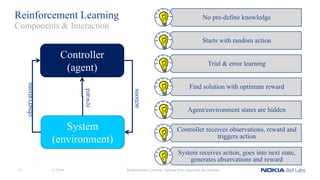
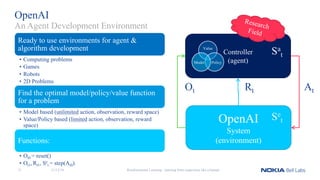
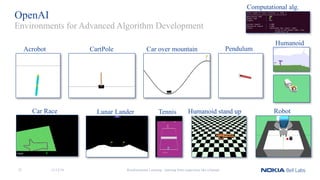
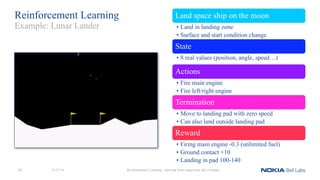
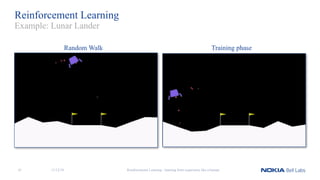
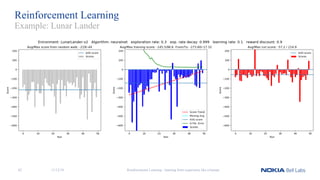
Reinforcement Learning - learning from experience like a human
Formalisms
Controller
(agent)
System
(environment)
Ot Rt At
Sa
t
Se
t
Value
PolicyModel
11/12/1820](https://image.slidesharecdn.com/reinforcementlearning-learningfromexperiencelikeahuman-181129091017/85/Reinforcement-Learning-Learning-from-Experience-like-a-Human-20-320.jpg)
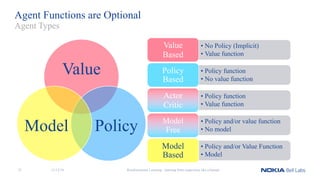
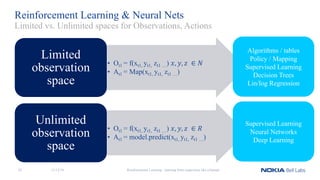
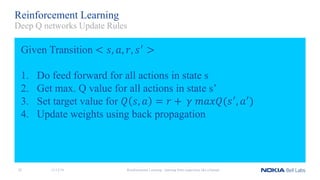
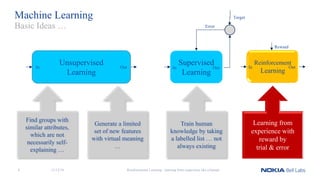
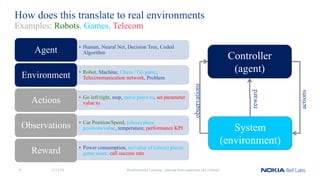
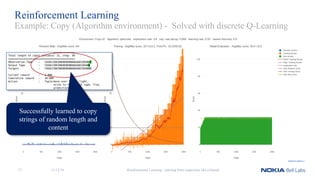
![Reinforcement Learning Balance inverted pendulum
• Simplified for 1 dimension
State
• Cart position [-2.4, 2.4]
• Cart Velocity [-inf, inf]
• Pole Angle [-41°, 41°]
• Pole velocity at tip [-inf, inf]
Actions
• Impacts cart direction & velocity
• Push cart to left
• Push cart to right
Termination
• Cart position at boundary (fails)
• Angle outside [-12, 12] (fails)
• More than 200 steps (terminates successfully)
Reward
• +1 for every step not terminating
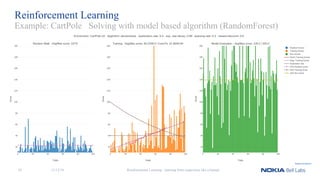
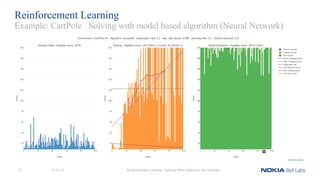
Reinforcement Learning - learning from experience like a human
Example: CartPole
By using random actions pole returns to stable state
11/12/1833](https://image.slidesharecdn.com/reinforcementlearning-learningfromexperiencelikeahuman-181129091017/85/Reinforcement-Learning-Learning-from-Experience-like-a-Human-33-320.jpg)



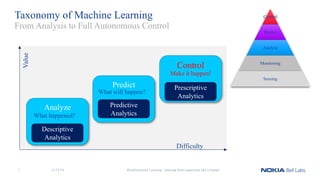
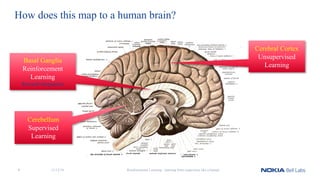
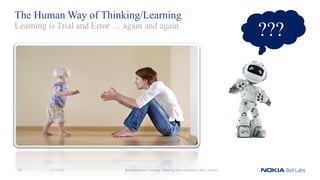
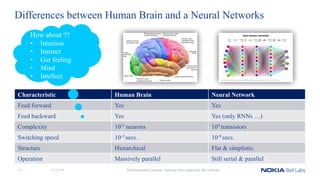
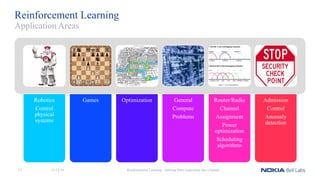
The document explores the concepts of reinforcement learning, comparing it to human learning through experience and trial-and-error methods. It discusses various types of machine learning, including supervised and unsupervised learning, as well as applications of reinforcement learning in robotics, optimization, and decision-making processes. Key components, agent-environment interactions, and various strategies for exploration and exploitation are also outlined, emphasizing the importance of feedback and iterative learning.