PID Controller Transfer Function
•
1 like•546 views

Part of Lecture Series on Automatic Control Systems delivered by me to Final year Diploma in Engg. Students. Easy language and Equally useful for higher level.
![BEE-502
Automatic Control Systems
Unit-5, PID Controller
Diploma in Engg.
(Electrical/ Instr. & Control)
5th Semester
Instructor: Mohd. Umar Rehman
21. 11. 2017
2
( )
o
i
( )
[ ing & i
( )
( )( )
(
ng by
)
]
s
sRC sRC
sC R
R sRC sRC
R sR
s R C s RC RCR
R sR
R RC R
E s Z
E Z
R
C
R C
C
C
C
C
sR
R R sRC
+ +
+ + = ×
+ +
+
=
=
÷
+
=
+
+
=
2
1
2 2 1 1
2 1
2 2 2 1 1
2
1 2 2
2
1 2 1 2 1 1 2 22
1 2 2
2 1 1 2 2
1 1
1 2 2 2 2
1 1
1 1
1
1
where,
KR sR RC RC
R
C
K
CsKRC K R
= + +
+
=2 1 1 1 1 2 2
1 2 2 2 2
1
1
Now, compare this expression with the following expression of TF:
PID P D
I
( ) K sG s K
K s
= + +
1
1
Then, we get the values of the various gains as follows:
P I D
, ,
KR
K
R K
RC
K
KR
K
C
= = =2 1 1
1 2 2
1
►►►▬◄◄◄](data:image/gif;base64,R0lGODlhAQABAIAAAAAAAP///yH5BAEAAAAALAAAAAABAAEAAAIBRAA7)
Recommended
Recommended
More Related Content
What's hot
What's hot (20)
Similar to PID Controller Transfer Function
Similar to PID Controller Transfer Function (20)
More from Mohammad Umar Rehman
More from Mohammad Umar Rehman (20)
Recently uploaded
Recently uploaded (20)
PID Controller Transfer Function
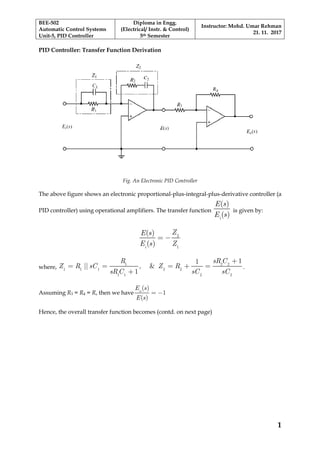
- 1. BEE-502 Automatic Control Systems Unit-5, PID Controller Diploma in Engg. (Electrical/ Instr. & Control) 5th Semester Instructor: Mohd. Umar Rehman 21. 11. 2017 1 PID Controller: Transfer Function Derivation Fig. An Electronic PID Controller The above figure shows an electronic proportional-plus-integral-plus-derivative controller (a PID controller) using operational amplifiers. The transfer function i ) ( ( )E s E s is given by: i ( ) ) (s ZE s E Z = − 2 1 where, , &|| sR C Z Z R sR sC sC R R sC C = + + = = =+1 2 2 1 1 1 2 2 1 1 2 2 1 1 1 . Assuming R3 = R4 = R, then we have o ( ( ) ) s E s E = −1 Hence, the overall transfer function becomes (contd. on next page)
- 2. BEE-502 Automatic Control Systems Unit-5, PID Controller Diploma in Engg. (Electrical/ Instr. & Control) 5th Semester Instructor: Mohd. Umar Rehman 21. 11. 2017 2 ( ) o i ( ) [ ing & i ( ) ( )( ) ( ng by ) ] s sRC sRC sC R R sRC sRC R sR s R C s RC RCR R sR R RC R E s Z E Z R C R C C C C C sR R R sRC + + + + = × + + + = = ÷ + = + + = 2 1 2 2 1 1 2 1 2 2 2 1 1 2 1 2 2 2 1 2 1 2 1 1 2 22 1 2 2 2 1 1 2 2 1 1 1 2 2 2 2 1 1 1 1 1 1 where, KR sR RC RC R C K CsKRC K R = + + + =2 1 1 1 1 2 2 1 2 2 2 2 1 1 Now, compare this expression with the following expression of TF: PID P D I ( ) K sG s K K s = + + 1 1 Then, we get the values of the various gains as follows: P I D , , KR K R K RC K KR K C = = =2 1 1 1 2 2 1 ►►►▬◄◄◄