参考文献
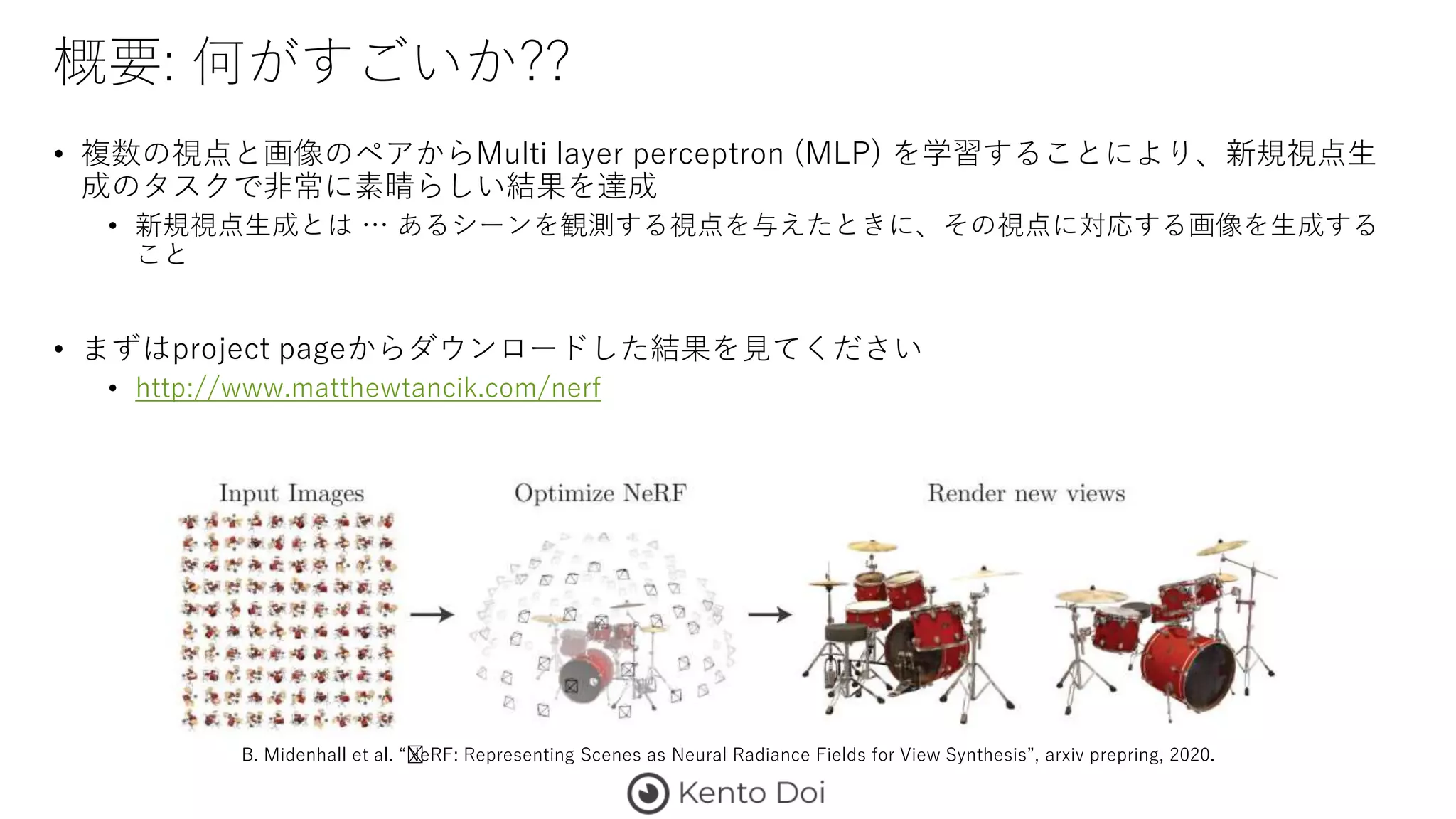
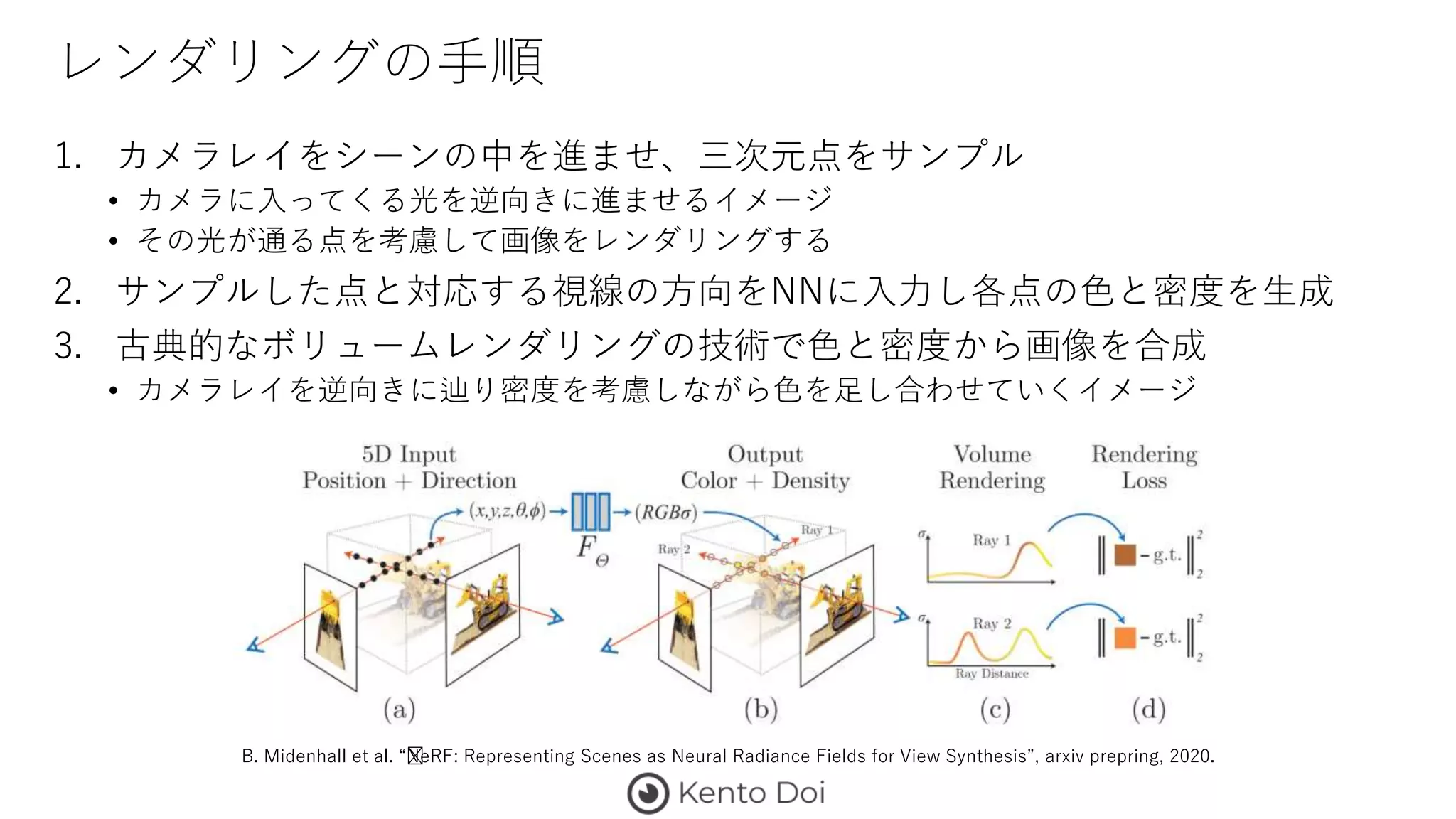
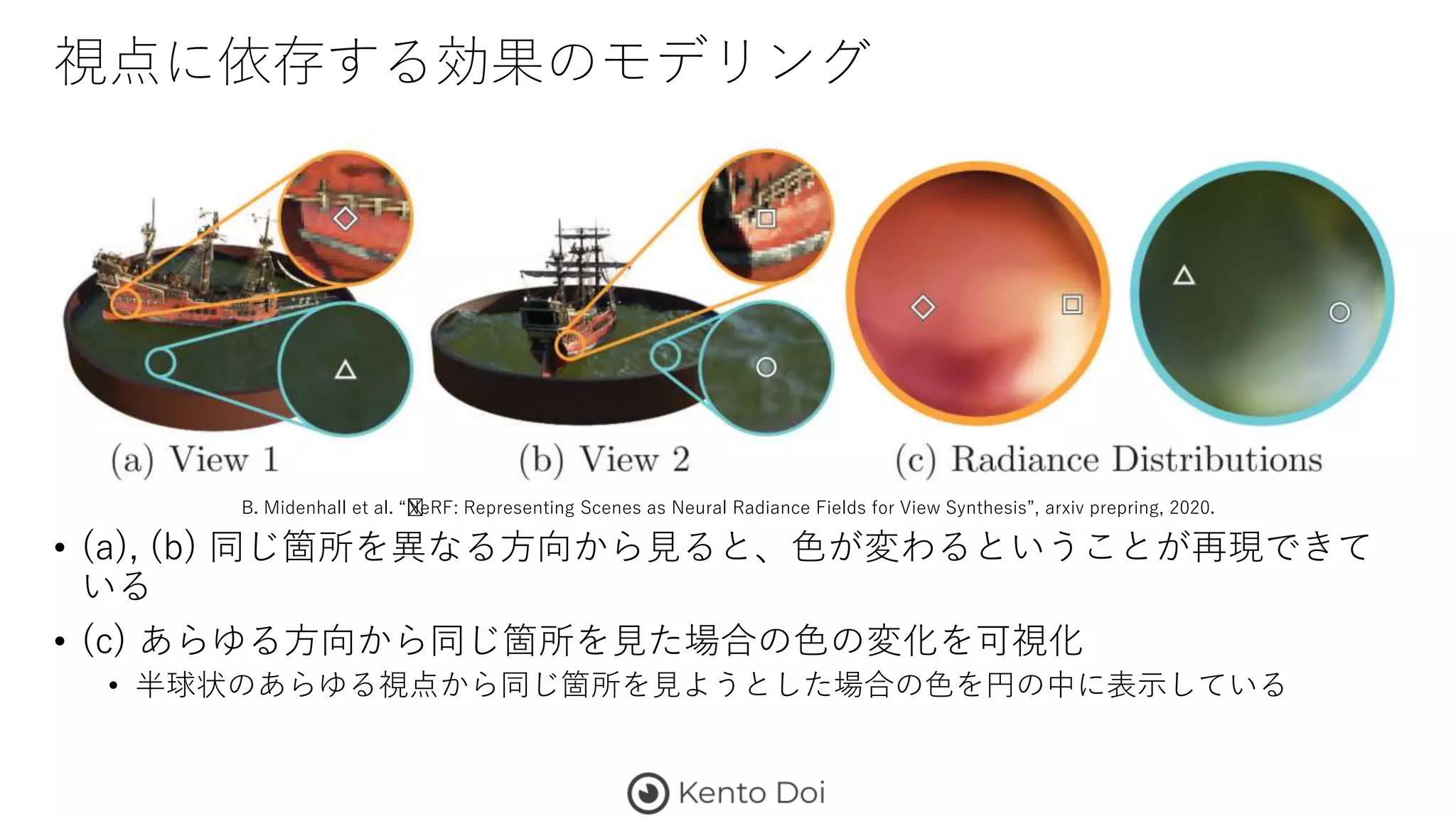
• B. Midenhallet al.: NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis.
arxiv prepring, 2020.
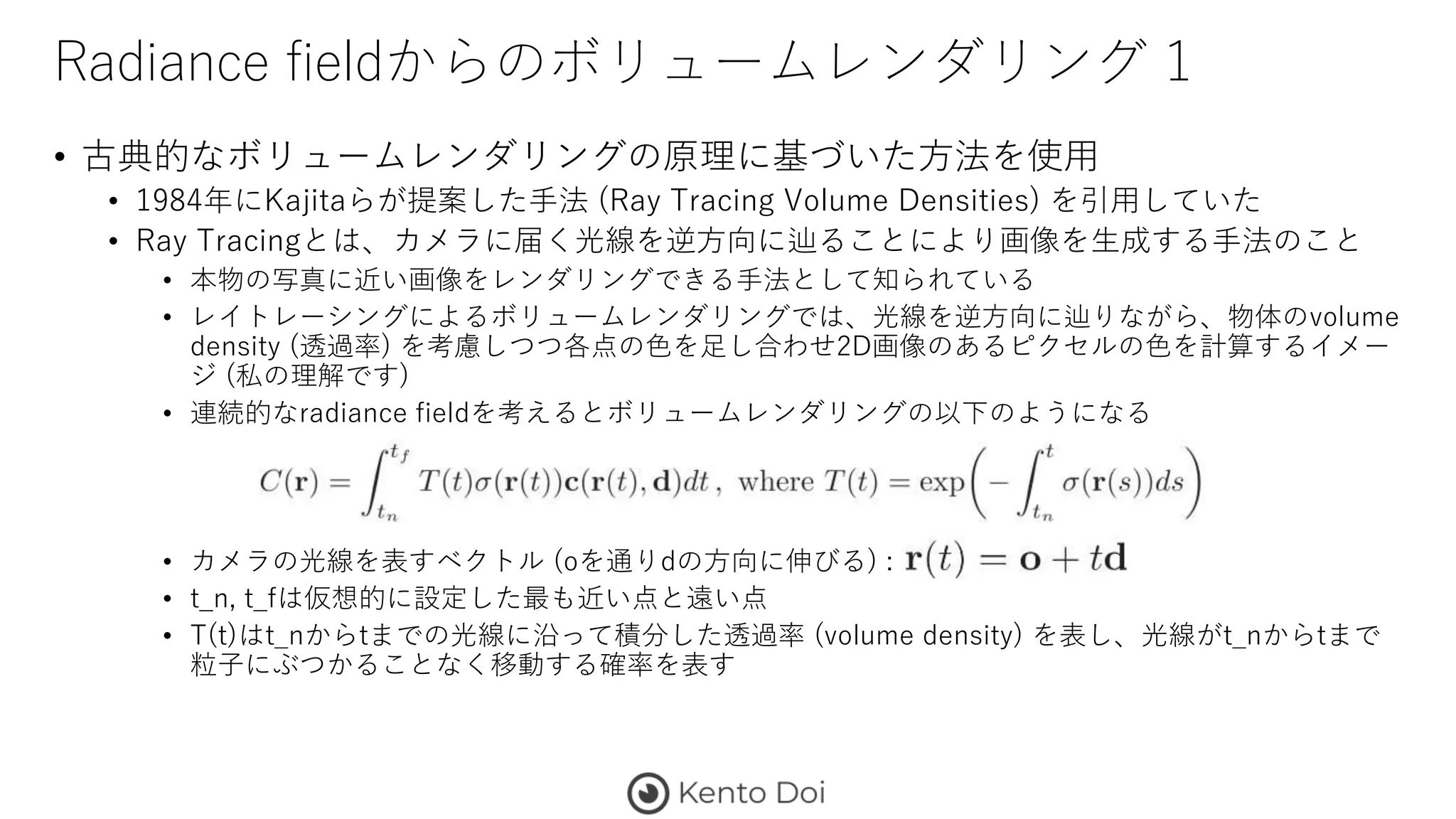
• J. T. Kajiya et al.: Ray Tracing Volume Densities. Computer Graphics, 1984.
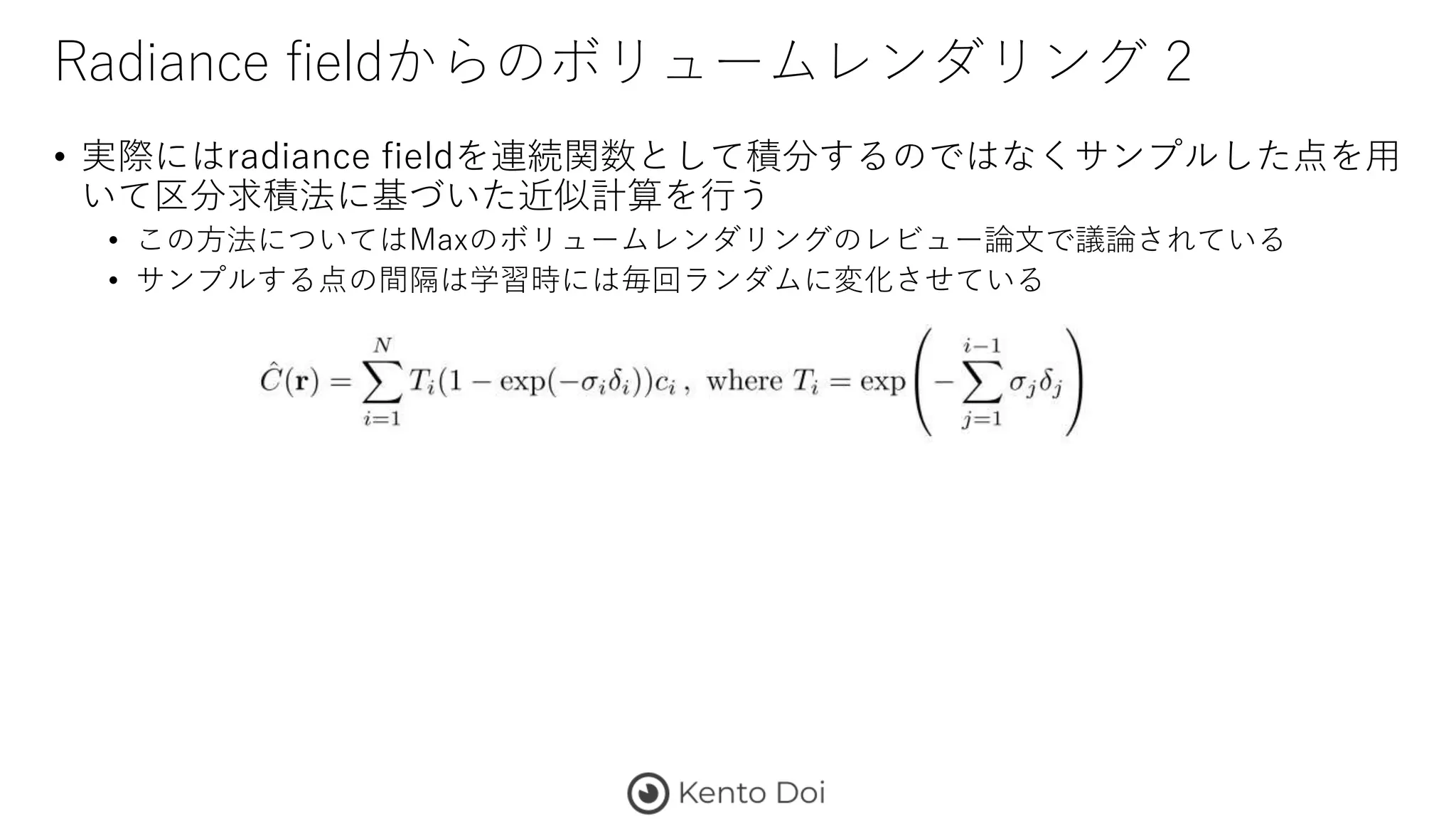
• N. Max: Optical models for direct volume rendering. IEEE Transactions on Visualization and
Computer Graphics 1995.
• M. Levoy: Efficient ray tracing of volume data. ACM Transactions on Graphics 1990.
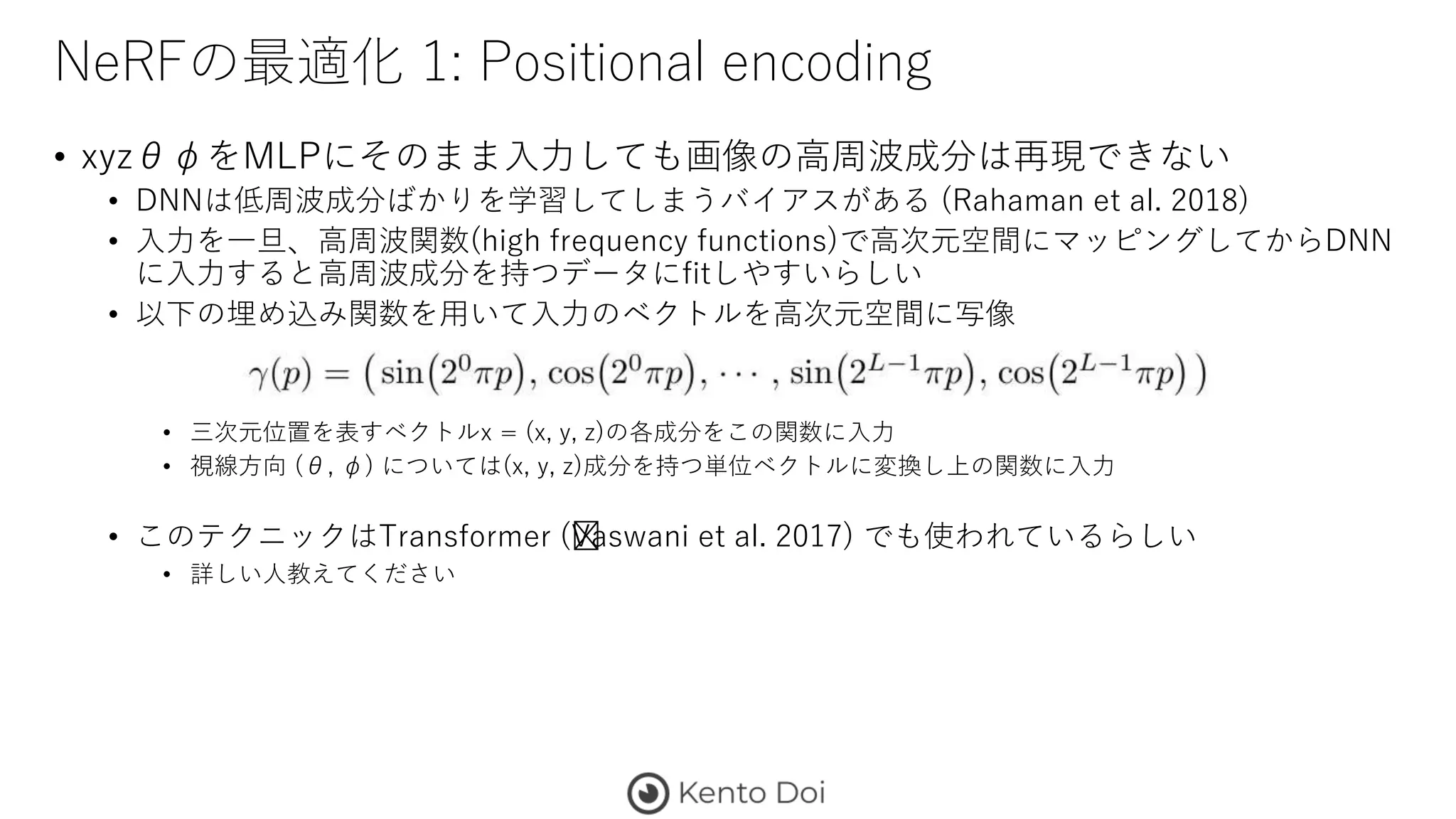
• N. Rahaman et al.: On the spectral bias of neural networks. in ICML 2018.
• A. Vaswani et al.: Attention is all you need. in NeurIPS 2018.
• S. Lombardi et al.: Neural volumes: Learning dynamic renderable volumes from images.
SIGGRAPH 2019.
• V. Sitzmann et al.: Scene Representation Networks: Continuous 3D-Structure-Aware Neural
Scene Representations. in NurIPS, 2019.
• B. Mildenhall et al.: Local light field fusion: Practical view synthesis with prescriptive sampling
guidelines. SIGGRAPH 2019.

![[DL輪読会]NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis](https://cdn.slidesharecdn.com/ss_thumbnails/nerfdlseminar1-200327021512-thumbnail.jpg?width=640&height=640&fit=bounds)


![SSII2022 [SS1] ニューラル3D表現の最新動向〜 ニューラルネットでなんでも表せる?? 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ss1ssii2022hkatoneural3drepresentationhiroharukato-220607054619-fadc6480-thumbnail.jpg?width=640&height=640&fit=bounds)









![SSII2022 [SS2] 少ないデータやラベルを効率的に活用する機械学習技術 〜 足りない情報をどのように補うか?〜](https://cdn.slidesharecdn.com/ss_thumbnails/ss2ssii2022-220607054716-2760bd30-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DL輪読会]GLIDE: Guided Language to Image Diffusion for Generation and Editing](https://cdn.slidesharecdn.com/ss_thumbnails/glide2-220107030326-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DL輪読会]A Higher-Dimensional Representation for Topologically Varying Neural R...](https://cdn.slidesharecdn.com/ss_thumbnails/ahigher-dimensionalrepresentationfortopologicallyvaryingneuralradiancefields1-210924021911-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Vision Transformer with Deformable Attention (Deformable Attention Tra...](https://cdn.slidesharecdn.com/ss_thumbnails/dl0114-220114032933-thumbnail.jpg?width=640&height=640&fit=bounds)



![[DL輪読会]画像を使ったSim2Realの現況](https://cdn.slidesharecdn.com/ss_thumbnails/imagesim2real-201030025320-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DL輪読会]Pay Attention to MLPs (gMLP)](https://cdn.slidesharecdn.com/ss_thumbnails/kobayashi-210528032327-thumbnail.jpg?width=640&height=640&fit=bounds)

![SSII2022 [OS3-02] Federated Learningの基礎と応用](https://cdn.slidesharecdn.com/ss_thumbnails/ssii2022-os3-02-220607020834-2b5f93ff-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]Deep Face Recognition: A Survey](https://cdn.slidesharecdn.com/ss_thumbnails/20181221-181221023935-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]BANMo: Building Animatable 3D Neural Models from Many Casual Videos](https://cdn.slidesharecdn.com/ss_thumbnails/banmo-220225035310-thumbnail.jpg?width=640&height=640&fit=bounds)