Downloaded 18 times

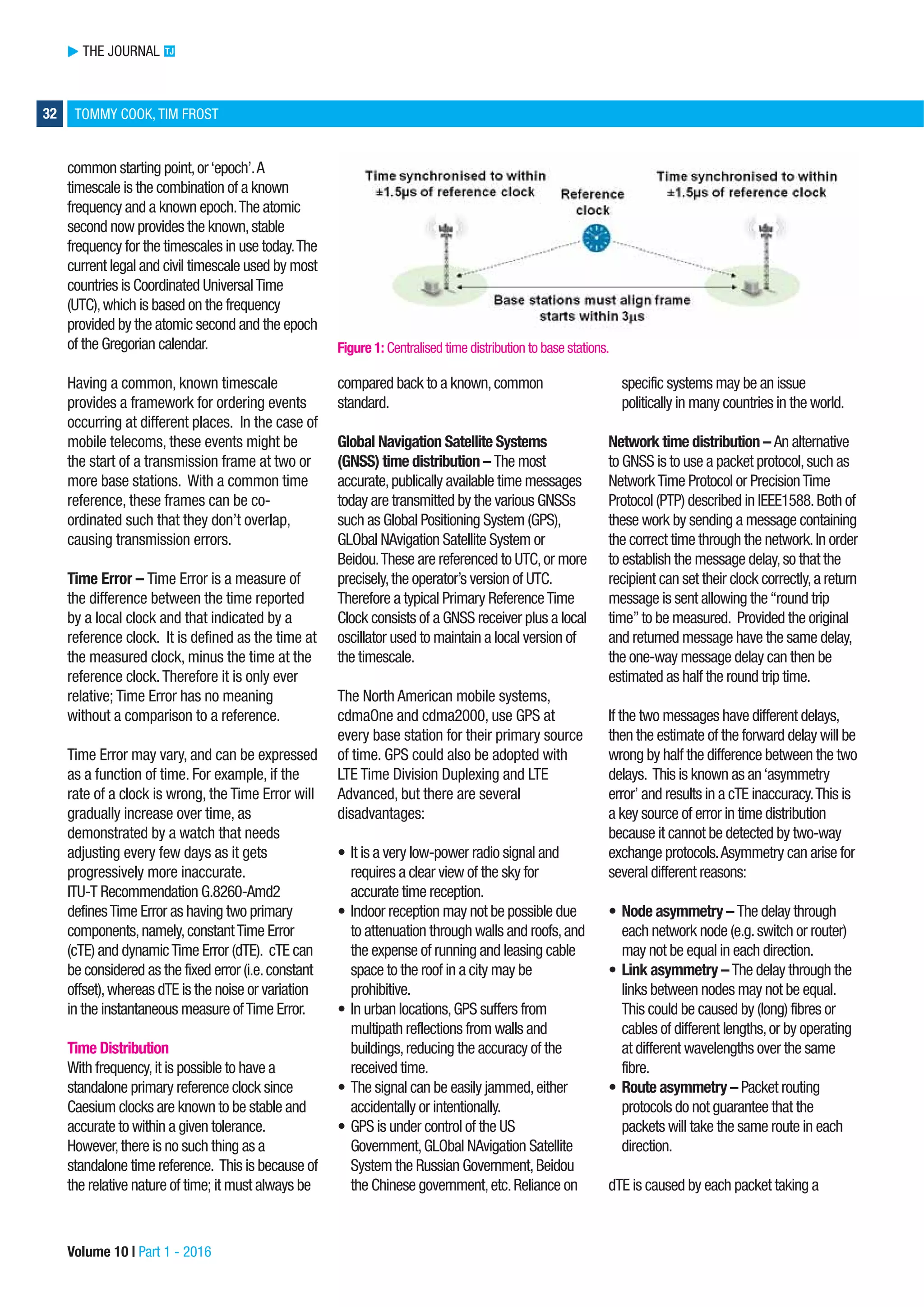
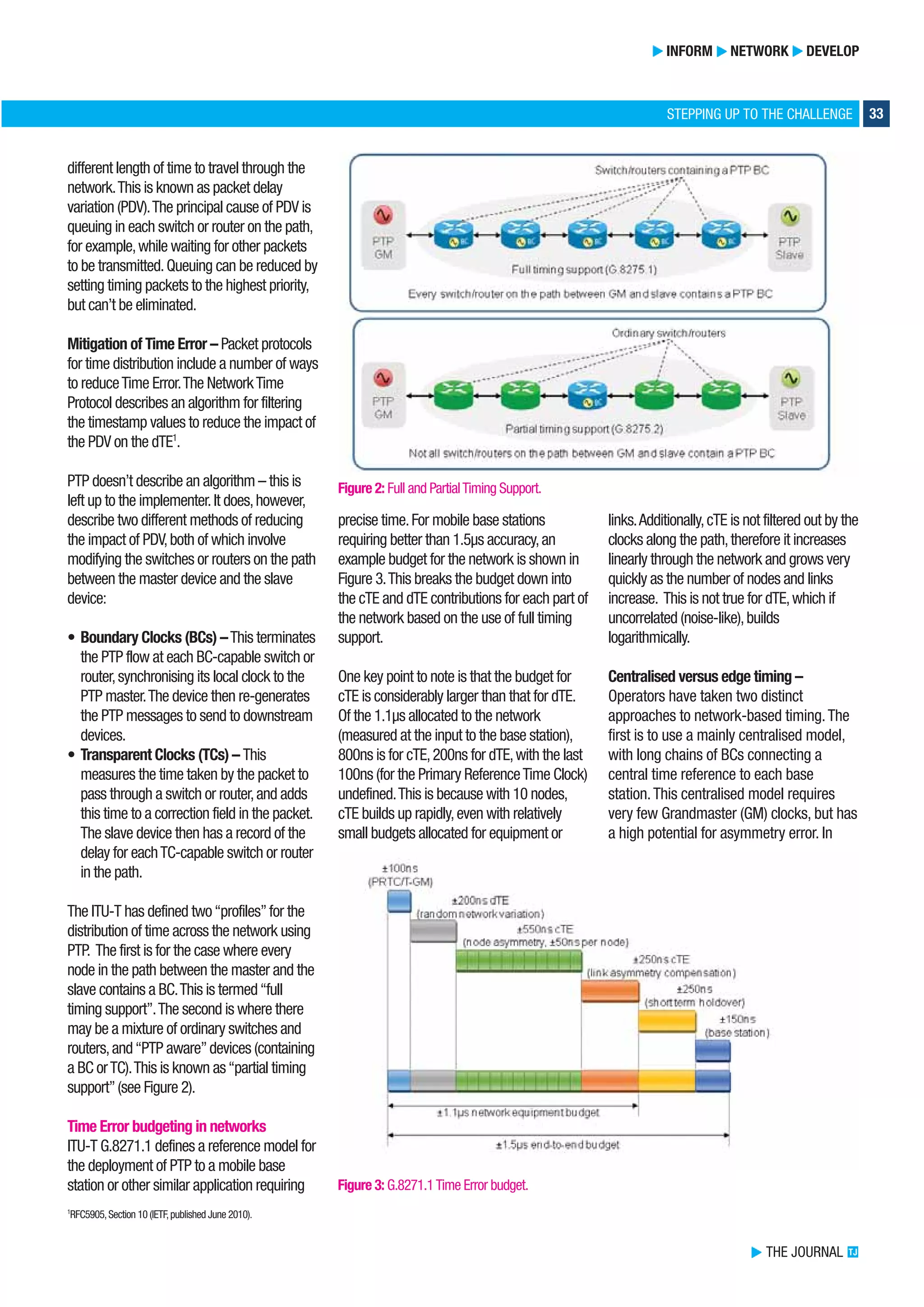


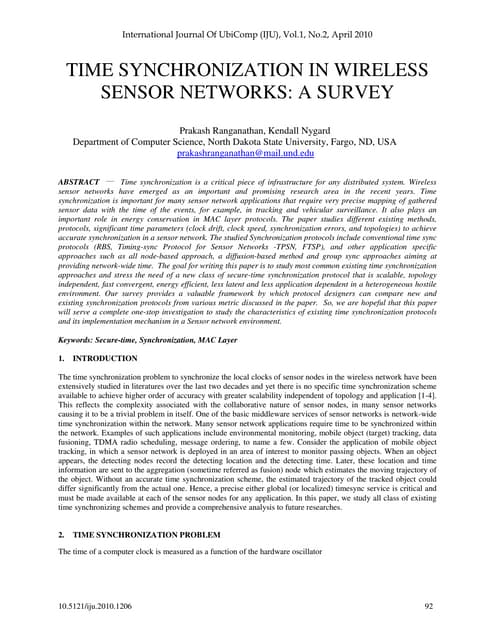
The document discusses the critical importance of frequency and time synchronization in telecom networks for effective data transmission, detailing the evolution of synchronization methods from frequency division multiplexing to use of GPS and network time protocols. It highlights challenges such as time error, packet delay variation, and the trade-offs between centralized and edge timing architectures. The authors conclude that achieving accurate time synchronization is essential for future networks amidst advancing technologies demanding tighter precision.