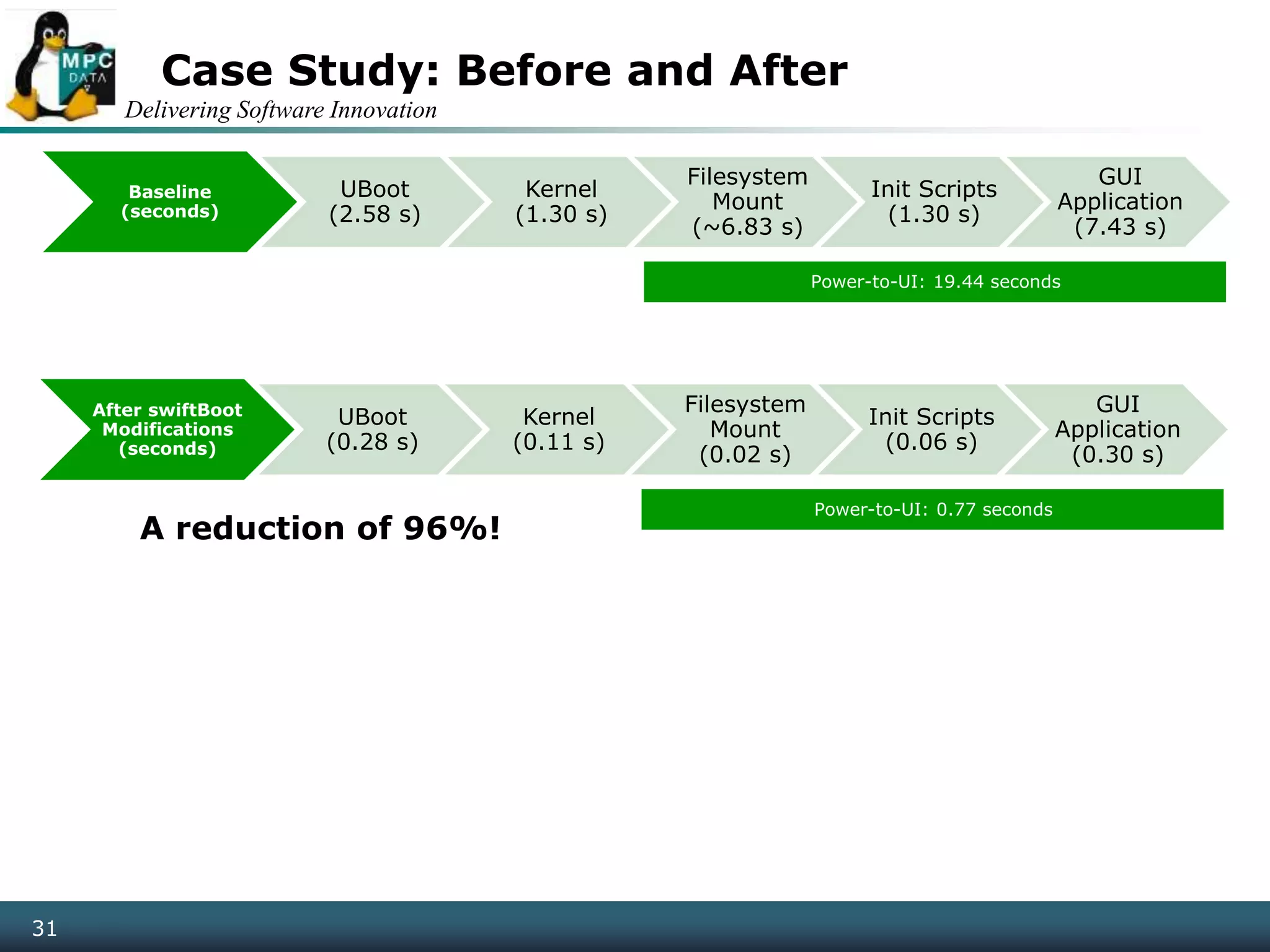
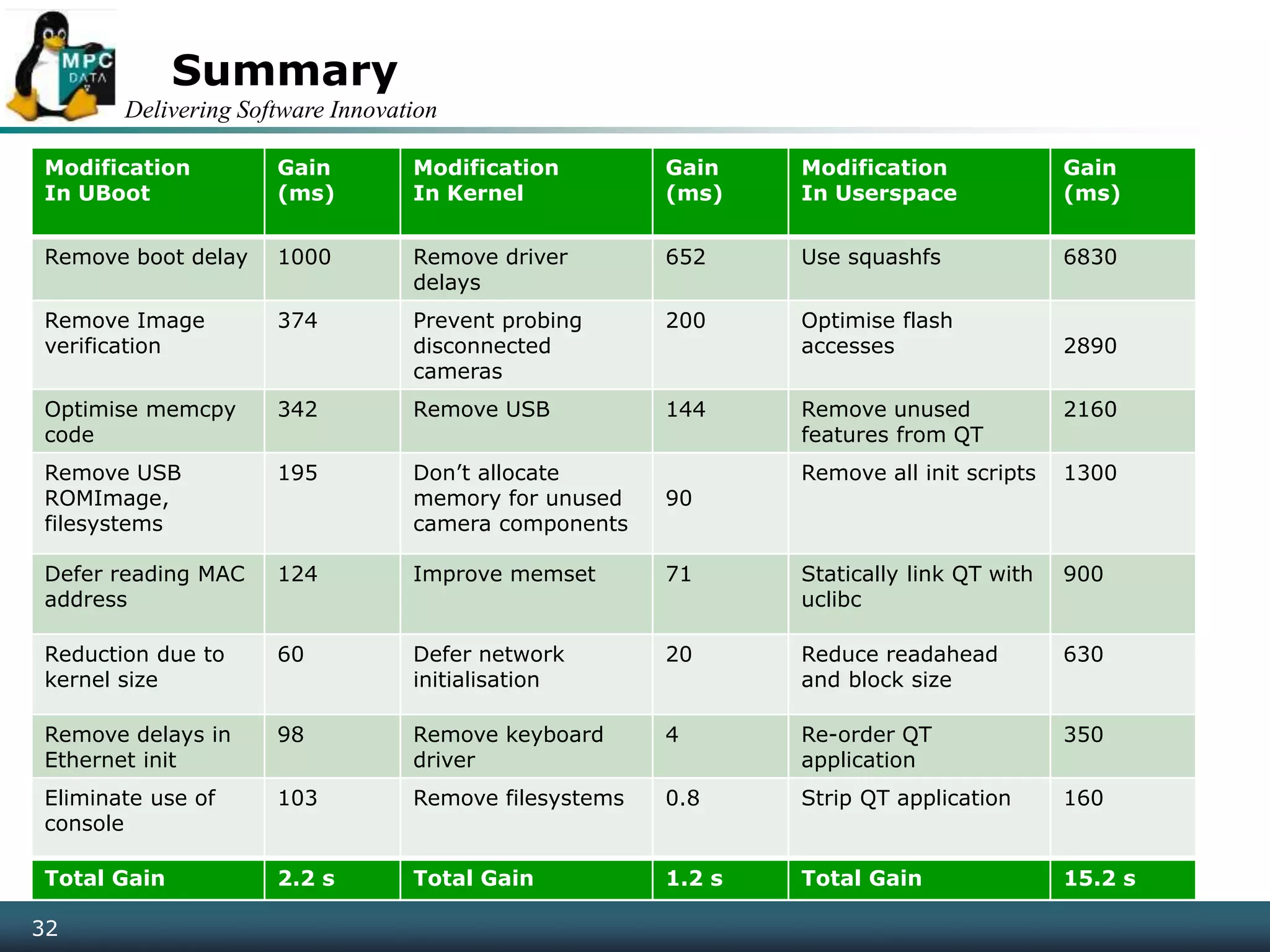
Andrew Murray from MPC Data discusses techniques for reducing boot times in embedded Linux devices, emphasizing the importance of identifying, measuring, and optimizing boot time functionality. A case study on the MS7724 'Ecovec' shows significant boot time improvements through various optimization strategies, ultimately achieving a reduction of boot time by 96%. The presentation concludes with principles for analyzing and addressing boot delays effectively.


![Delivering Software Innovation
34
Conclusion & Call to action
Reducing cold boot time is a like removing the
longest links of a chain until you have just
short links
As a result boot time is a product of a system
design and long links can be easily added
Effort will always be required to remove and
shorten links for a given system
Holy grail is to reduce this amount of effort to
nothing – some ideas towards this:
[Idealism] Asynchronous initialisation in the kernel by default
– Many challenges here
– This would reduce effect of delays in drivers
[Realism] Simple Caching framework for device probes
– To eliminate probes for known hardware (generic device tree)
– Could encompass LPJ, etc](https://image.slidesharecdn.com/celfpresentation-101029030159-phpapp02/75/ELC-E-2010-The-Right-Approach-to-Minimal-Boot-Times-34-2048.jpg)





























































![Vibe Coding vs. Spec-Driven Development [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/vibecodingvsspecdrivendevelopment-251209105622-43f455e7-thumbnail.jpg?width=640&height=640&fit=bounds)

















