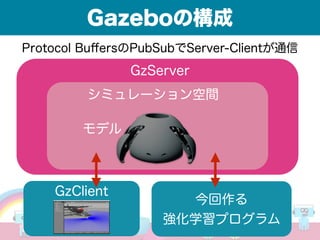
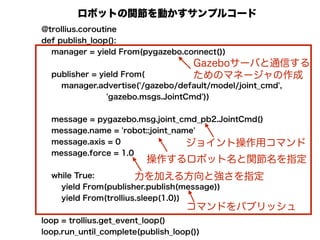
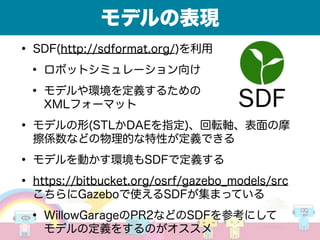
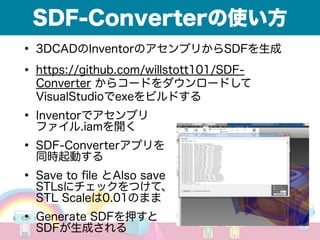
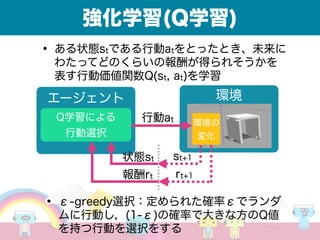
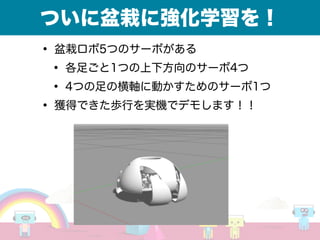
2015年10月10日に開催された PyConJP2015 で発表したスライドです。 Gazeboによる4足歩行ロボットのシミュレーションを行い、強化学習(Q-Learning)で歩行動作を獲得する試みです。 また、その学習成果を実機のロボットに適用し、4足ロボットを実際に歩かせてみました。











![[DL輪読会]医用画像解析におけるセグメンテーション](https://cdn.slidesharecdn.com/ss_thumbnails/20190301fujino4-190322072121-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会] マルチエージェント強化学習と心の理論](https://cdn.slidesharecdn.com/ss_thumbnails/0917imai-211210044729-thumbnail.jpg?width=640&height=640&fit=bounds)




![[DL輪読会]GQNと関連研究,世界モデルとの関係について](https://cdn.slidesharecdn.com/ss_thumbnails/20180817-180827085537-thumbnail.jpg?width=640&height=640&fit=bounds)







![SSII2021 [SS1] Transformer x Computer Visionの 実活用可能性と展望 〜 TransformerのCompute...](https://cdn.slidesharecdn.com/ss_thumbnails/ss1-01-210607043349-thumbnail.jpg?width=640&height=640&fit=bounds)




![[DL輪読会]End-to-end Recovery of Human Shape and Pose](https://cdn.slidesharecdn.com/ss_thumbnails/end2endrecoveryofhumanshapeandpose-180112002454-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DL輪読会]Depth Prediction Without the Sensors: Leveraging Structure for Unsuper...](https://cdn.slidesharecdn.com/ss_thumbnails/struct2depth0301-190304050917-thumbnail.jpg?width=640&height=640&fit=bounds)




























