1. Лекция №15
Многозвенные механизмы
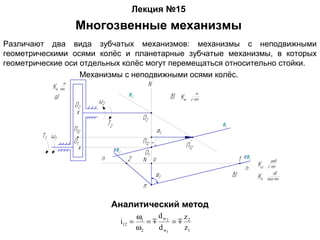
Различают два вида зубчатых механизмов: механизмы с неподвижными
геометрическими осями колёс и планетарные зубчатые механизмы, в которых
геометрические оси отдельных колёс могут перемещаться относительно стойки.
Механизмы с неподвижными осями колёс.
Аналитический метод
i12 =
dw
ω1
z
= 2 = 2
ω2
d w1
z1
2. Силы в зацеплении.
Fn12 =
T1
rв1
Ft12 = Fn12 ⋅ cos α w =
Fr12 = Fn12 ⋅ sin α w = Ft12 ⋅ tgα w =
T1
2T
= 1
rw1 d w1
2T1
⋅ tgα w
d w1
3. Соотношение между моментами.
Для установившегося движения T1 ⋅ ω1 ⋅ η12 = −T2ω2 ,
Откуда T1 = − T2
i12 ⋅ η12
,
где Т 2 – момент сопротивления, приложенный к ведущему валу 2;
η12 – коэффициент полезного действия рассматриваемого редуктора.
Величину η12 можно подсчитать по значениям коэффициентов полезного действия
отдельных кинематических пар, входящих в состав редуктора
2
η12 = η3
,
подш ⋅ η з.п.
где η подш – значение КПД подшипников,
η з.п.– КПД пары зубьев.
При расчёте моментов используются табличные значения КПД отдельных
кинематических пар, приведенные в справочной литературе.
Для неустановившегося движения соотношение между моментами будет
T1 =
− T2
пр
+ ε1 ⋅ J1
i12 ⋅ η12
,
где - ε 1 угловое ускорение первого звена;
пр
J1
– приведенный к первому валу момент инерции всех звеньев
машины, начиная со звена приведения до выходного звена.
4. Передаточное отношение и КПД многоступенчатой
передачи
Передаточное отношение двухступенчатой передачи, показано на рис.
Передаточное отношение
многоступенчатой
передачи равно
произведению
передаточных
отношений отдельных
ступеней,
ω
ω ⋅ω
входящих в её состав.
i = 1 = 1 2 = i ⋅i
13
ω3
ω2 ⋅ ω3
12
η13 =
КПД передачи
23
N3 N 2 ⋅ N3
=
= η12 ⋅ η23
N1 N1 ⋅ N 2
, N1
где N 2 – мощность подаваемая на входной вал,
N 3 – мощность, проходящая на второй (промежуточный) вал,
– мощность на выходном валу.
Таким образом КПД многоступенчатой передачи равен произведению КПД
отдельных степеней, входящих в её состав.
5. Планетарные механизмы
Различают планетарные механизмы:
а) с одной степенью подвижности – редукторы и мультипликаторы
б) с несколькими степенями подвижности – дифференциальные механизмы.
Передаточное отношение планетарного механизма с одной степенью
подвижности.
6. Аналитический метод.
ω1 − ωн
передаточное отношение в обращенном движении: i =
ω3 − ωн
Н
13
где индекс «н» при i13 показывает, что передаточное отношение записано
для случая, когда всем звеньям добавлена угловая скорость « − ω н ».
ω −ω
ω
ω3 = 0 , то 1 н = 1 + 1 = −i1н + 1 , то
Так как
− ωн
− ωн
Н
н
i13 = −i1н + 1 и i1н = 1 − i13 .
Так как в обращённом движении геометрические оси всех звеньев
механизма будут неподвижными, то соотношения между угловыми
скоростями звеньев в этом движении могут быть записаны как для
механизма с неподвижными осями.
z z
н
н
i13 = i12 ⋅ i н = − 2 − 3
Так для схемы приведённой на рис. 3.38
23
z z /
1 2
7. Графоаналитический метод.
Масштаб плана угловых скоростей
kω =
ω1 рад
О1 с ⋅ мм
или масштаб частоты вращения
kn =
n1 об
О1 мин ⋅ мм
Передаточное отношение механизма
i1н =
O1
OН
8. Соотношение между моментами на валах
планетарного механизма
Из условия равновесия механизма
Т1 + Т н + Т 3 = 0
Для механизма, изображенного на
рис. 3.40 возможны два случая:
а) ω1 − ωн > 0 , что соответствует i1н > 1
и i1н < 1 , при этом ведущим в
обращённом движении остаётся
н
Т1 ( ω1 − ωн ) η13 = −Т 3 ( 0 − ωн )
звено 1, тогда
−Т
н
н
откуда Т 3 = −Т1 ⋅ i13 ⋅ η13 Т1 = 1 − i н ⋅нηн
13
13
н
η13 = η3 ⋅ η2.п.
где
под
з
(б) ω1 − ωн < 0 что соответствует 1 > i1н > 0 , при этом ведущим в
н
обращенном движении будет звено 3, тогда Т 3 ( 0 − ωн ) η31 = −Т 3 ( ω1 − ωн )
н
− Т1 ⋅ i13
н
Т3 =
η31 = η3 ⋅ η2.п. . После подставим Т 3 в выражение
под
з
н
откуда
η13 , где
− Тн
н
н
(а) и учитывая, что η31 = η13 , получим Т1 =
н
1−
i13
н
η13
9. Коэффициент полезного действия.
Из выражения Т1 ⋅ ω1 ⋅ η1н = −Т н ωн
η1н =
− Тн
Т1 ⋅ i1н
после подстановки Т1 получим:
н
н
1 − i13 ⋅ η13
для случая «а» η1н =
,
i1н
1−
для случая «б» η1н =
н
i13
н
η13
i1н
.
10. Коэффициент полезного действия.
Из выражения Т1 ⋅ ω1 ⋅ η1н = −Т н ωн
η1н =
− Тн
Т1 ⋅ i1н
после подстановки Т1 получим:
н
н
1 − i13 ⋅ η13
для случая «а» η1н =
,
i1н
1−
для случая «б» η1н =
н
i13
н
η13
i1н
.