1. Лекция №6
Силовой анализ рычажных механизмов с учётом трения в
кинетических парах
Наличие трения в кинематических парах изменяет величину и направление действующих сил. При
наличии трения скольжения сила взаимодействия двух соприкасающихся тел отклоняется от общей
нормали к их поверхностям на угол трения. Тангенс угла трения равен коэффициенту трения скольжения
tgϕT = f T
(2.80)
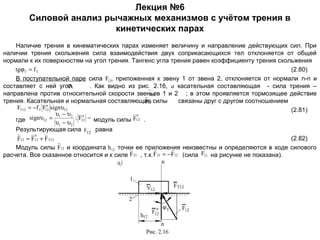
В поступательной паре сила F12, приложенная к звену 1 от звена 2, отклоняется от нормали n-n и
ϕ
составляет с ней уголT
. Как видно из рис. 2.16, а касательная составляющая - сила трения –
направлена против относительной скорости звеньев 1 и 2 ; в этом проявляется тормозящее действие
υ12
трения. Касательная и нормальная составляющие силы
связаны друг с другом соотношением
F12
n
FT12 = −f T F12 signυ12
(2.81)
υ1 − υ2
n
n
где signυ12 = υ − υ ; F12 − модуль силы F12 .
1
2
Результирующая сила F12 равна
n
(2.82)
F12 = F12 + FT12
Модуль силы F12 и координата h12 точки ее приложения неизвестны и определяются в ходе силового
расчета. Все сказанное относится и к силе F21 , т.к. F 21 = −F12 (сила F21 на рисунке не показана).
2. Учет трения во вращательной кинестатической паре
Во вращательной паре (рис. 2.16, б) силы взаимодействияF12 = −F 21 (сила F21 на рисунке не показана)
также отклоняются от нормали n-n, а потому проходят не через центр шарнира О, а по касательной к
окружности (в точке Т), центр которой совпадает с центром шарнира. Круг, ограниченный этой
окружностью, называется кругом трения, его радиус равен ρ T = rц sin ϕT , гдеrц - радиус цапфы. Так как угол
трения ϕT обычно не превышает 6-7°, sin ϕT ≈ tgϕT = f T
то
. Поэтому с некоторым допущением можно
принять ρ T = rц f T
(2.83)
Модуль силы F12 и направление линии действия этой силы неизвестны и определяются силовым
расчетом.
Действие силы F12 (рис. 2.16, б) можно заменить совместным действием силы F′12 , равной F12 и
F , F′′12
приложенной в центре шарнира, и пары 12 сил
. Направление действия этой пары сил
противоположно угловой скорости ω12 , с которой звено 1 вращается относительно звена 2. В этом
проявляется тормозящее действие трения в шарнире.
Пару сил F12 , F′′12 , приложенную к звену 1 от звена 2, называют моментом трения в шарнире,
величина которого равна
M T12 = −rц f T F12 signω12 ,
(2.85)
[
[
где signω12 =
]
ω1 − ω2
; F12
ω1 − ω2
-модуль силы F12
]
3. Порядок проведения силового расчёта с учётом трения в парах
В кинематических парах может иметь место постоянная составляющая силы и момента
сил сухого трения, не зависящая от сил в кинематических парах. Это «прилипание» хорошо
обработанных металлических поверхностей или трение в уплотнениях кинематических пар,
зависящее от натяга уплотнительных колец.
Тогда общие выражения для силы трения и момента сил трения в кинематических парах
будут
n
(2.86)
FT12 = −(FT12 + f T F12 )signυ12 ;
(2.87)
M T12 = −(M 12 + rц f T F12 )signω12 ,
T
где FT12 и M 12 - постоянные составляющие силы трения и момента сил трения в парах.
T
Основные положения силового расчета с учетом трения в кинематических парах такие
же, как и расчета без учета трения, поскольку наличие трения не изменяет числа
неизвестных в кинематических парах. Силовой расчет рычажных механизмов с учетом
трения проводят методом итераций (последовательных приближений).
В первой итерации определяются неизвестные силы в кинематических парах при условии
равенства нулю сил и моментов сил трения, зависящих от сил в парах. Во второй итерации
определяются силы и моменты сил трения в зависимости от сил, действующих во всех
кинематических прах, и кинетостатический расчет проводится в том же порядке, но с учетом
дополнительно приложенных сил и моментов сил трения, определенных по формулам (2.86)
и (2.87). Следующие итерации аналогичны второй. Опыт показывает, что уже второе
приближение дает хорошие результаты.
4. Силовой анализ кривошипно-ползунного механизма с учётом трения
в парах
Расчётная схема механизма
На рис. 2.17 показана расчетная схема кривошипно-ползунного механизма, на которой
показаны силы в кинематических парах, полученные в первой итерации, и дополнительные
силы и моменты трения, необходимые для второй итерации. Остальные силы на этом
рисунке не показаны.
5. Алгоритм силового анализа кривошипно-ползунного механизма
Выражения для сил и моментов трения, полученные при равенстве нулю постоянных
составляющих моментов трения, имеют вид
Звено 3
(2.88)
FT 34 = −(FT 34 + f T F34 )signυ34
(2.89)
M T 32 = −rц f T F32 signω32
Звено 2
M T 23 = −M T 32
M T 21 = −rц f T F21 signω21
M T 2 = M T 23 + M T 21
(2.90)
(2.91)
(2.92)
Звено 1
M T12 = −M T 21
M T14 = −rц f T F14 signω14
M T1 = M T12 + M T14
где υ34 = υB
ω32 = ω3 − ω2 = −ω2
2
2
F32 = F32 X + F32 y
ω21 = ω2 − ω1
2
2
F21 = F21X + F21y
ω14 = ω1
2
2
F14 = F14 X + F14 y
M T 2 и M T1 - суммарные моменты сил трения, действующие на звенья 2 и 1.
(2.93)
(2.94)
(2.95)
6. Силовой анализ механизма с гидроцилиндром с учётом трения в
парах
Расчётная схема механизма
На рис. 2.18 представлена схема механизма с гидроцилиндром, на которой также
показаны только силы в кинематических парах и дополнительные силы и моменты трения.
7. Алгоритм силового анализа механизма с гидроцилиндром
[
]
Звенья 1-2
′
′′
FT 21 = − FT 21 + f T ( F21 + F21 ) signυ21
(2.96)
M T14 = −rцfT F signω14 ;
14
(2.97)
M T 23 = − rцf T F23 signω23 ;
M T 2 = M T14 + M T 23 ;
(2.98)
(2.99)
Звено 3
M T32 = −M T 23 ;
M T34 = −( MT34 + rцf T F34 )signω34 ;
M T3 = M T32 + M T34 ;
Здесь ω14 = ω1; ω23 = ω1 − ω3 ; ω34 = ω3 ;
(2.100)
(2.101)
(2.102)
F = F2 X + F2 y ;
14
14
14
2
2
F23 = F23X + F23y ;
2
2
F34 = F34X + F34 y ;
M T 2 и M T3 - суммарные моменты сил трения, действующие соответственно на звенья 1-2 и 3.
Как показывают расчеты, учет переменной составляющей трения в кинематических парах приводит к
изменению значений силовых параметров до 20%.
8. Графоаналитический метод силового анализа рычажных механизмов
Кривошипно-ползунный механизм
Схема структурной группы со всеми приложенными силами представлена на рисунке 2.19, а. Здесь
главный момент сил инерции звена 2 заменен парой сил FMU 2 = M u 2 / 2 , приложенных в точках А и В.
Для системы сил, действующих на звено 2, составим уравнение моментов относительно точки В
∑ M B = 0.
2
t
M B (G 2 ) + M B (Fu 2 ) − M B ( FПГ 2 ) + M B (FMU 2 ) + M B (F21) = 0,
t
где неизвестная составляющая силы F21 направлена произвольно – вниз от точки А.
В развернутом виде уравнение перепишется как
t
G 2 h G 2 + Fu 2 h U 2 − FПГ 2 ⋅ h Г 2 + FMU 2 ⋅ AB + F21 ⋅ AB = 0
Откуда неизвестная сила будет
− G 2 h G 2 − Fu 2 h U 2 + FПГ 2 ⋅ h Г 2 − FMU 2 ⋅ AB
t
F21 =
AB
(2.103)
Здесь через h с индексами обозначены плечи соответствующих сил относительно точки В. Как видно
t
из формулы для F21 , плечи сил могут быть взяты непосредственно из рисунка группы по рисунку 2.19, а,
невзирая на масштаб его построения.
9. План кривошипно-ползунного механизма
n
Для определения величин нормальной составляющей силы в точке А F21 и силы F34
векторное уравнение равновесия структурной группы, сгруппировав силы по звеньям:
∑ F = 0.
2,3
t
Или F34 + (FC3 + FT3 ) + FПГ3 + Fu 3 + G 3 + G 2 + FПГ 2 + Fu 2 + F21 + Fn = 0.
21
составим
(2.104)
// AB
⊥x
Решим векторное уравнение графически - путем построения многоугольника сил (рис. 2.19,б). Для
этого необходимо выбрать масштабный коэффициент построения плана сил K F , используя любую
известную силу, лучше максимальную – у нас (FC3 + FT 3 ) .
(F + F )
(2.105)
K F = C3 T 3
Z(FC3 + FT 3 )
Тогда отрезки, изображающие остальные известные силы будут
G
F
ZG 2 = 2 ; ZFПГ 2 = ПГ 2 и т.д.
KF
KF
Пересечение в точке ''с'' линии, параллельной АВ, и первой, перпендикулярной оси Х, определяет
n
искомые отрезки Z F34 и Z F 21 :
F34 = Z F34 ⋅ K F ;
n
n
F21 = Z F 21 ⋅ K F .
n
t
F21 = F21 + F21
Величина силы равна: F21 = Z F 21 ⋅ K F
10. Алгоритм определения уравновешивающего момента и остальных
неизвестных силовых факторов
Для силы F34 необходимо определить точку ее приложения. Воспользуемся уравнением моментов для
звена 3 относительно точки .
∑ M B = 0 или M B (G 3 ) + M B ( FC3 + FT 3 ) + M B (FПГ3 ) + M B ( Fu 3 ) + M В (F32 ) + F34 ⋅ h 34 = 0
(2.106)
3
Так как для рассматриваемого примера все остальные силы проходят через точку В, то и сила
F34 также проходят через эту точку и ее плечо h 34 = 0 .
∑ F = 0 или F34 + (FC3 + FT 3 ) + FПГ3 + Fu 3 + G 3 + F32 = 0
3
Неизвестный вектор силы F32 определим с помощью построенного многоугольника сил на рис. 2.19,
б, соединив точки b и c:
F32 = Z F32 ⋅ K F
Рассмотрим равновесие начального звена 1 механизма (рис. 2.19, в). F12 = −F 21
Требуется определить силу F14 в шарнире О и уравновешивающий момент M y .
Из уравнения моментов для звена 1 относительно точки О определим уравновешивающий момент:
∑ M O = 0 или − F12 1 cos ψ1 + M y = 0
(2.108)
1
M y = F12 1 cos ψ1.
Момент M y , совпадающий по направлению с положительной угловой скоростью ω1 , будет
положительным, а направленный против ω1 будет отрицательным.
Уравнение равновесия ведущего звена имеет вид
F14 + F12 = 0
Отсюда F14 = −F12 = F 21
(2.110)
![Учет трения во вращательной кинестатической паре
Во вращательной паре (рис. 2.16, б) силы взаимодействияF12 = −F 21 (сила F21 на рисунке не показана)
также отклоняются от нормали n-n, а потому проходят не через центр шарнира О, а по касательной к
окружности (в точке Т), центр которой совпадает с центром шарнира. Круг, ограниченный этой
окружностью, называется кругом трения, его радиус равен ρ T = rц sin ϕT , гдеrц - радиус цапфы. Так как угол
трения ϕT обычно не превышает 6-7°, sin ϕT ≈ tgϕT = f T
то
. Поэтому с некоторым допущением можно
принять ρ T = rц f T
(2.83)
Модуль силы F12 и направление линии действия этой силы неизвестны и определяются силовым
расчетом.
Действие силы F12 (рис. 2.16, б) можно заменить совместным действием силы F′12 , равной F12 и
F , F′′12
приложенной в центре шарнира, и пары 12 сил
. Направление действия этой пары сил
противоположно угловой скорости ω12 , с которой звено 1 вращается относительно звена 2. В этом
проявляется тормозящее действие трения в шарнире.
Пару сил F12 , F′′12 , приложенную к звену 1 от звена 2, называют моментом трения в шарнире,
величина которого равна
M T12 = −rц f T F12 signω12 ,
(2.85)
[
[
где signω12 =
]
ω1 − ω2
; F12
ω1 − ω2
-модуль силы F12
]](data:image/gif;base64,R0lGODlhAQABAIAAAAAAAP///yH5BAEAAAAALAAAAAABAAEAAAIBRAA7)