Download to read offline
![Note – could have used [ 1..8 ; using(r)[2] ; 1 ] since
[ 1 ; 7? ; using(r)[2] ; 1 ] ≤ [ 1 ..8 ; using(r)[2] ; 1 ]](https://image.slidesharecdn.com/infinit2016bentthomsen-160413112600/75/Vaerktojer-udviklet-pa-AAU-til-analyse-af-SCJ-programmer-33-2048.jpg)

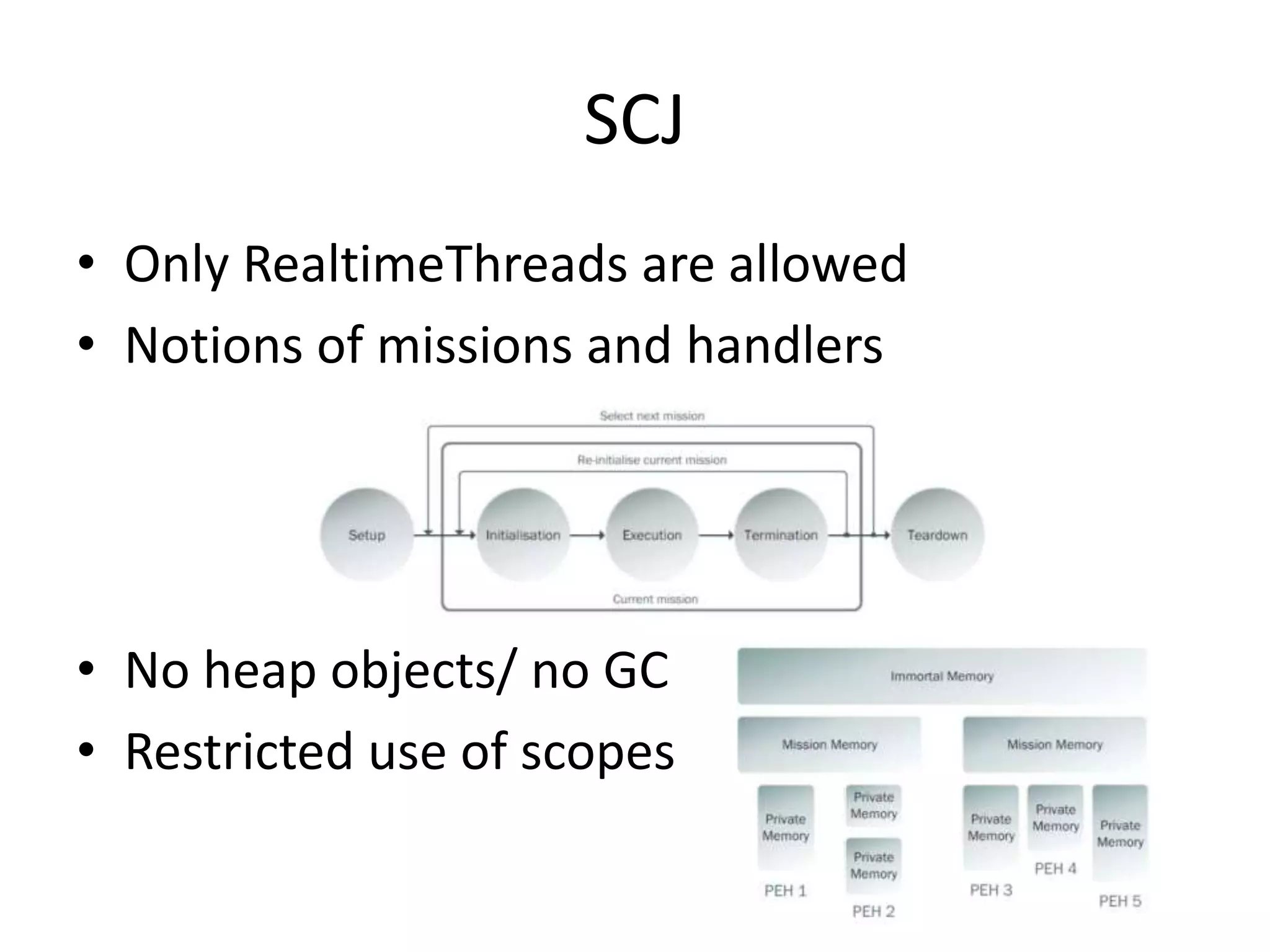
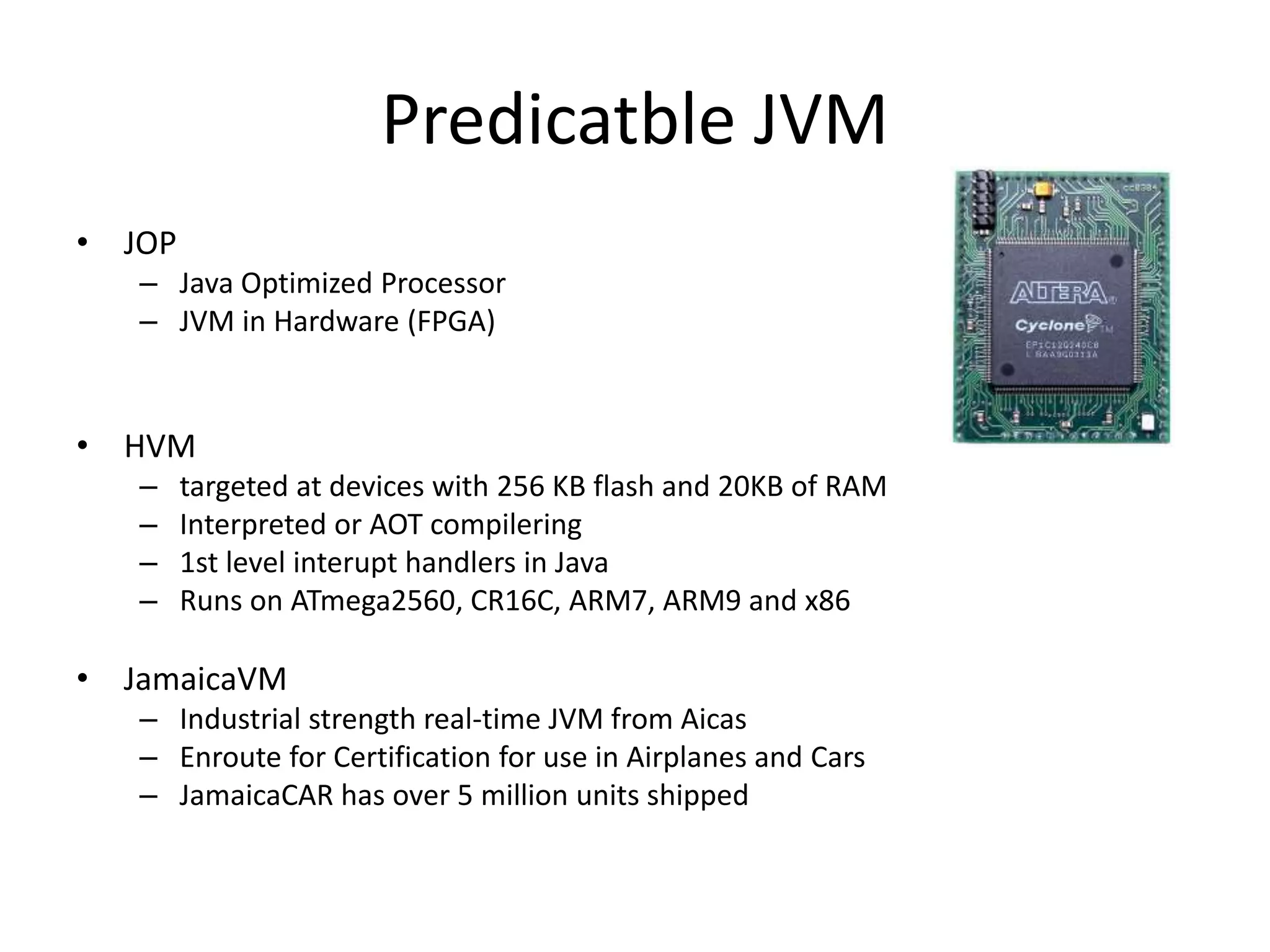
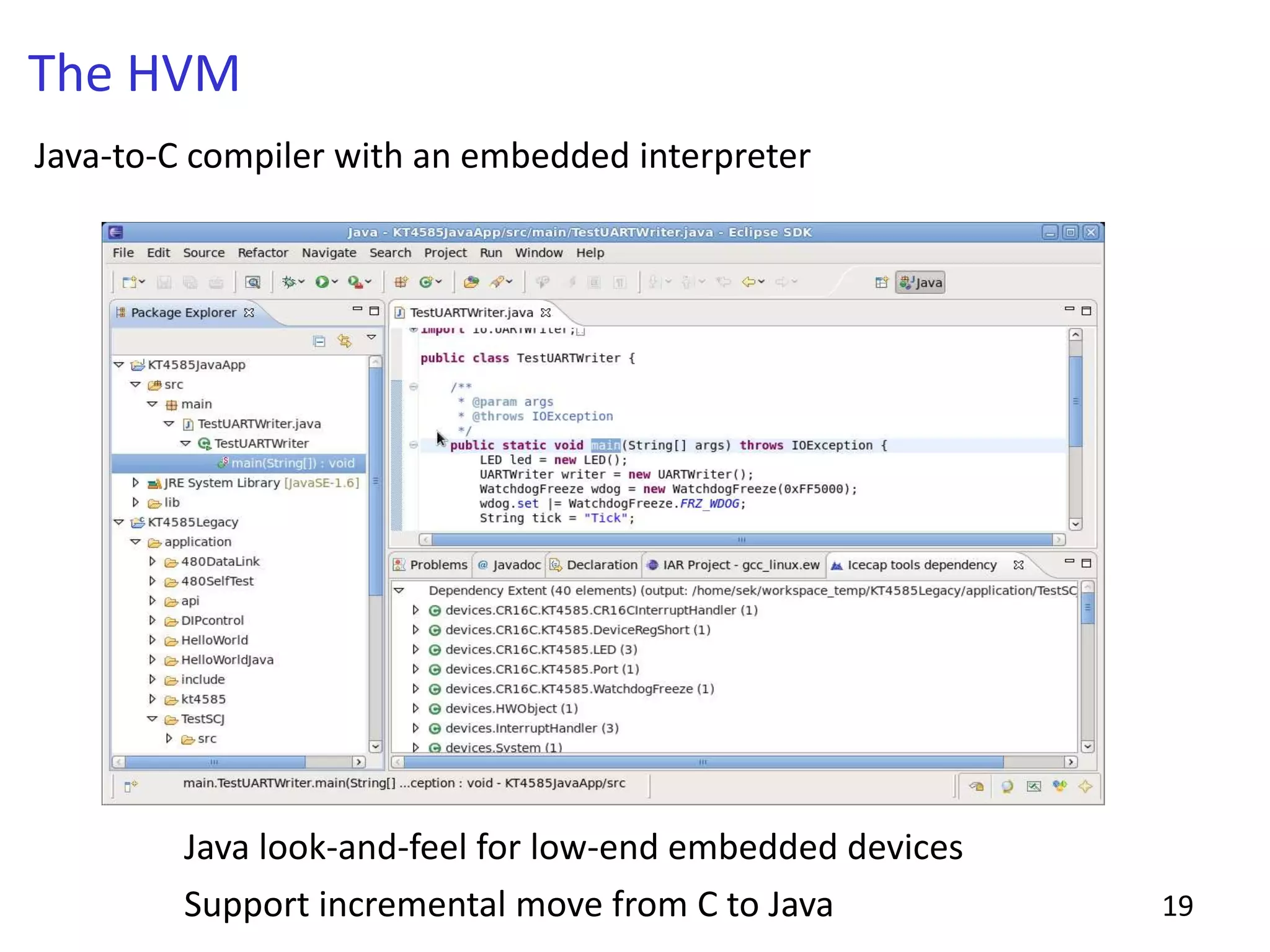
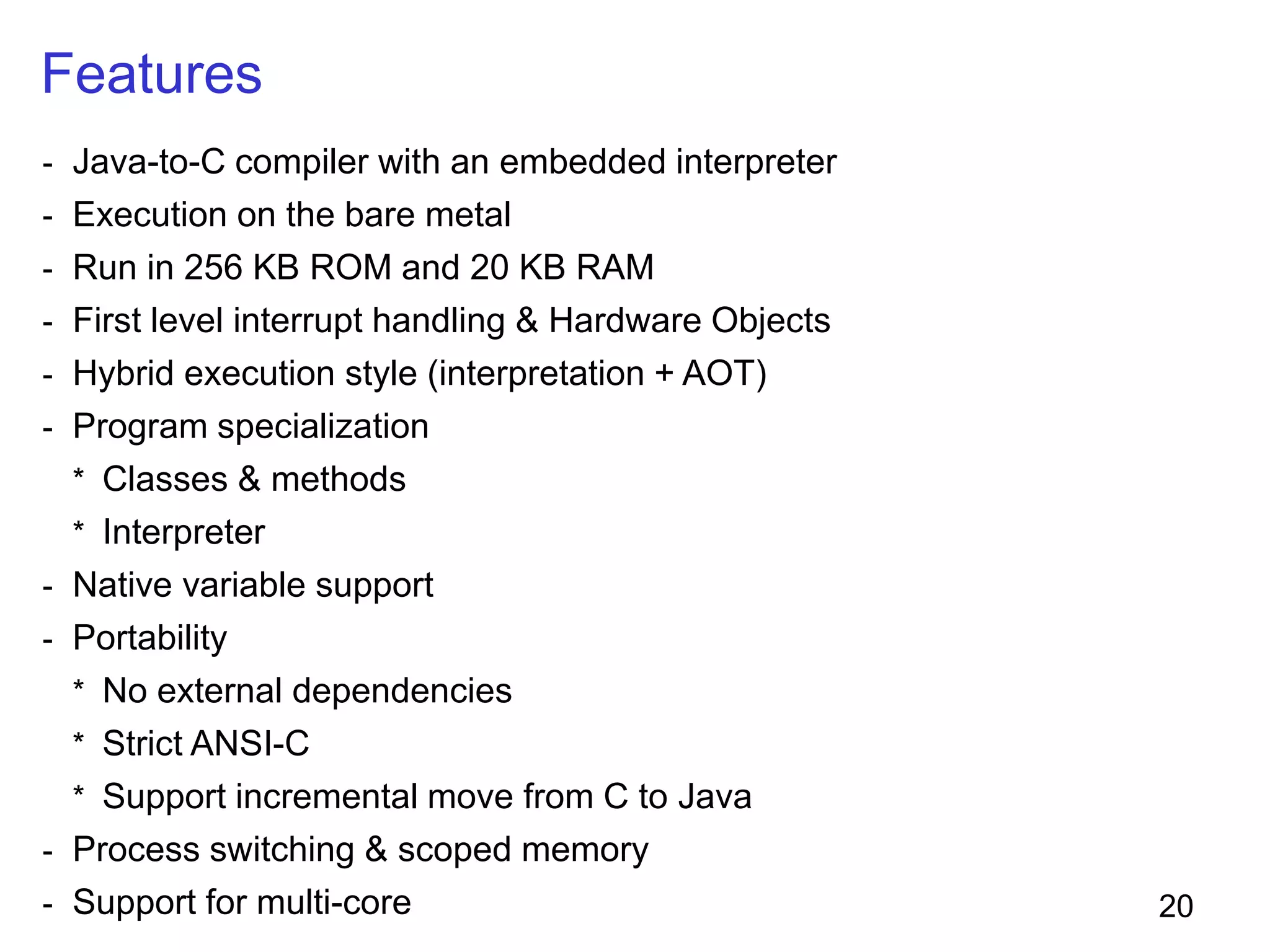
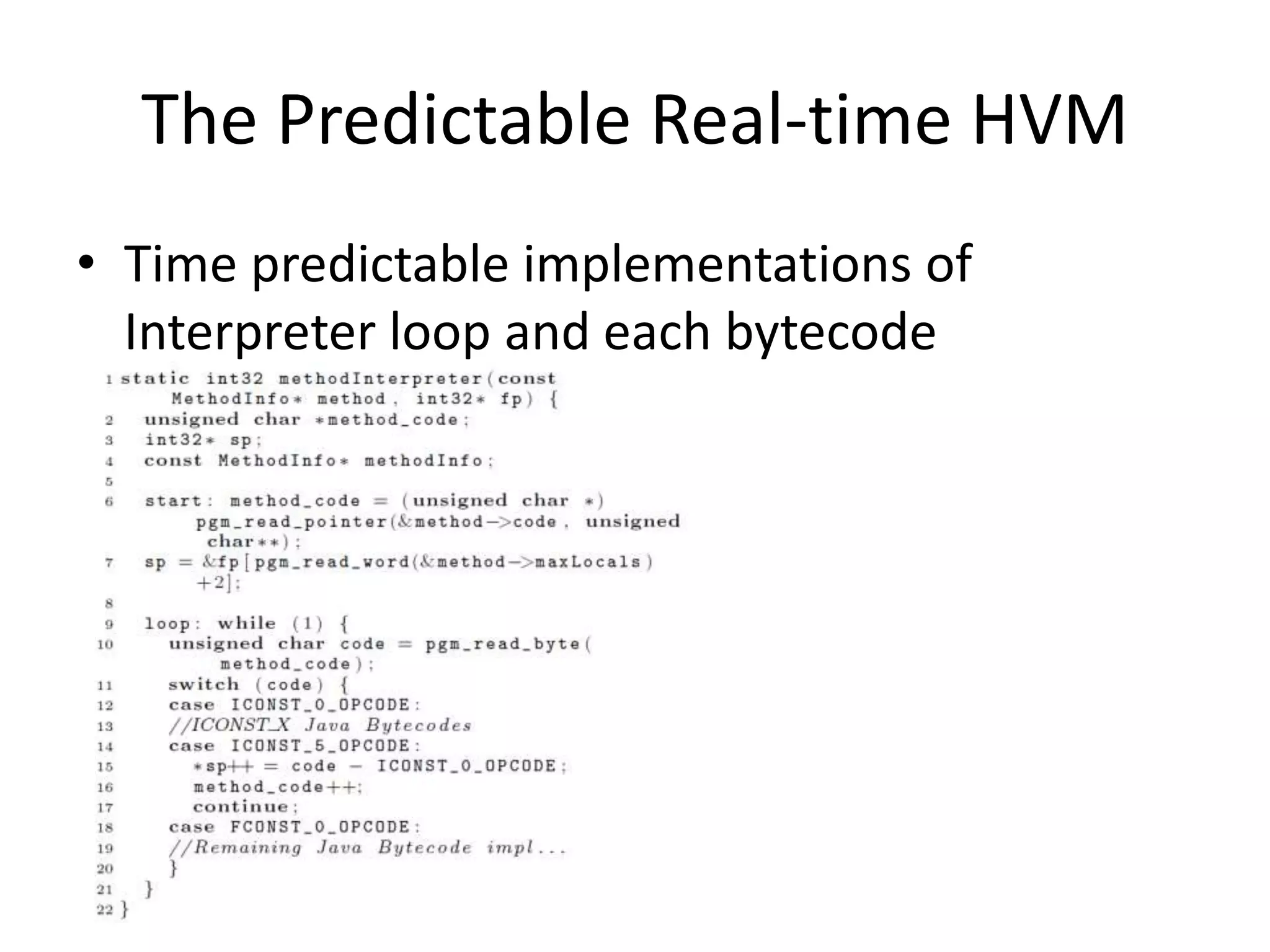
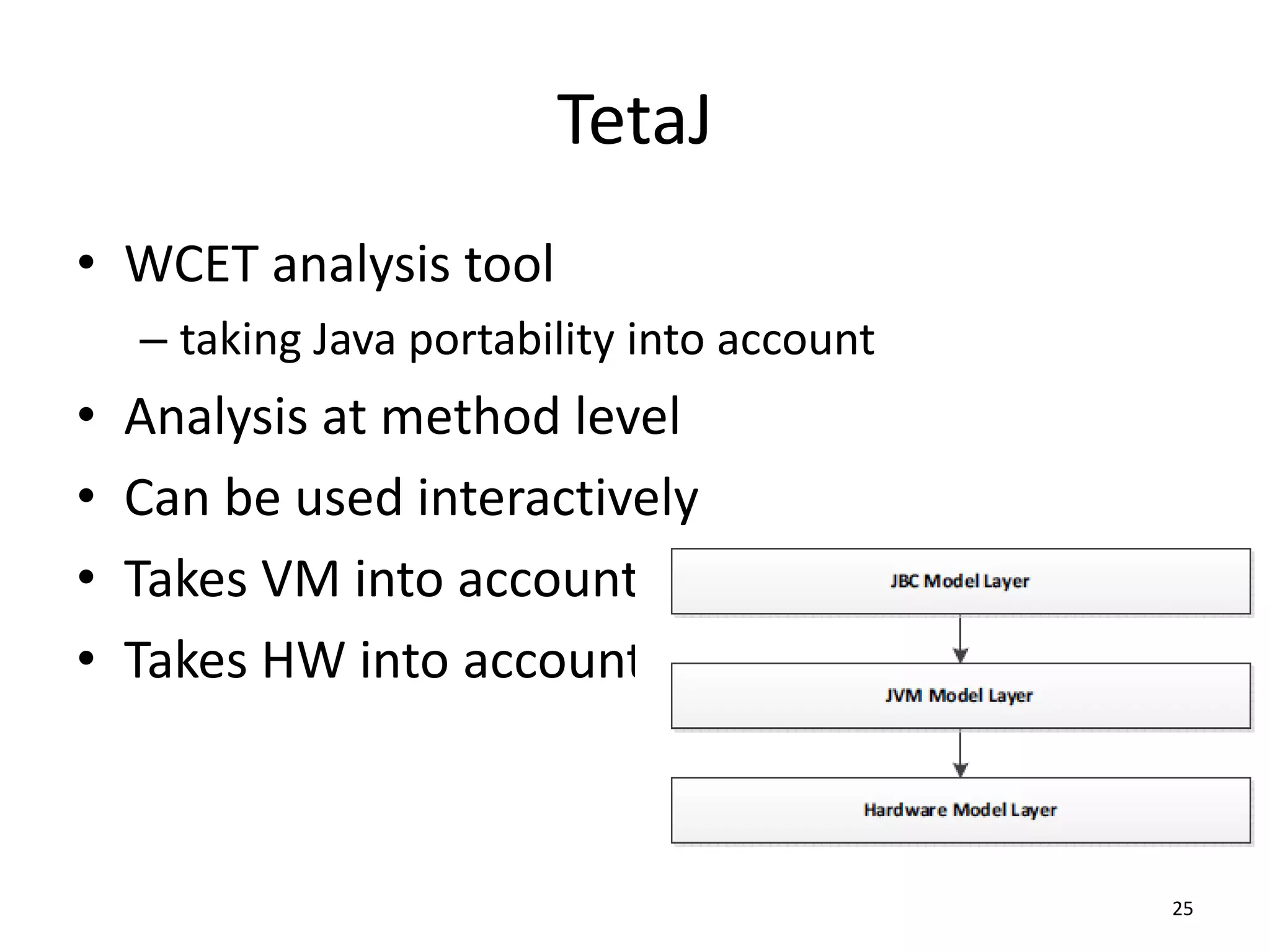
The document discusses the challenges and advancements in programming safety-critical embedded systems, particularly focusing on Java as a preferred language. It highlights issues such as unpredictable performance and the introduction of the Real-Time Specification for Java (RTSJ) and Safety-Critical Java (SCJ) to enhance software reliability. The evolution of tools and methodologies for real-time analysis and compliance with standards is also addressed, emphasizing the need for compatibility and effectiveness in developing embedded systems.












































































![Coded Agents – with UiPath SDK + LangGraph [Virtual Hands-on Workshop]](https://cdn.slidesharecdn.com/ss_thumbnails/codedagentsdeck-251215155422-5497c599-thumbnail.jpg?width=640&height=640&fit=bounds)

















